静电喷枪喷涂模型的数值模拟与试验研究
2018-07-04 05:58张淑珍赵培李泽元袁小龙崔之超
机械制造与自动化 2018年3期
张淑珍,赵培,李泽元,袁小龙,崔之超
(兰州理工大学 机电工程学院,甘肃 兰州 730050)
0 引言
随着自动化生产程度不断提高,自动喷涂已成为趋势。大型产品的表面漆膜多是由喷漆机器人以特定的漆膜沉积模型经轨迹规划后喷涂形成的。漆膜沉积模型的优劣直接影响喷涂轨迹的规划与产品最终的漆膜表面质量。已提出的模型主要有两类,一类是以高斯分布模型[1]、柯西分布模型[2]为代表的无限范围模型,另一类是有限范围模型,如分段函数模型[3-4]、均匀厚度模型[5]、变厚度模型[6]、β分布模型[7]、椭圆双β分布模型[8]。其中高斯分布模型、柯西分布模型、变厚度模型、分段函数模型、均匀厚度模型都是假设的理论模型,没有实物依据,同时也缺少实验支持;β分布模型与椭圆双β分模型是在空气喷枪的基础上建立的,但实际生产中,空气喷涂效率低,漆料利用率只有30%~40%,而静电喷涂特有的静电环保效应,能使带电喷雾颗粒尽可能多地沉积在工件上,较大提升涂料沉积率(70%~80%),既提高生产效率又减少环境污染。但静电环保效应使静电喷涂产生的沉积模型与空气喷涂产生的沉积模型有较大不同。J.Domnick等人[9-10]利用实验与数值模拟研究了带电粒子在耦合场中的运动及沉积分布形状,却未提出具体的沉积模型;T.I.Zohdi[11]详细研究了带电粒子在电磁场中的受力与运动状态,也未提出静电喷涂沉积模型;David C等人[12]在静电喷涂基础上提出一种加权高斯模型,但模型中需要设定很多参数,模型也比较复杂,不便于生产应用。针对这些情况,本文在实验的基础上,对静电喷枪定参数喷涂形成的漆膜厚度分布规律进行了研究,提出一种求解方便的新静电喷涂沉积模型。
1 理论基础
静电喷涂是以被涂物为正电极,涂料雾化装置为负电极,接电源负高压,在两极就形成了高压静电场。阴极发生电晕放电,可使喷出的涂料介质带电,并进一步雾化。遵照“同性相斥,异性相吸”的原理,带电的涂料介质在电场力作用下,对被涂物形成环抱效应,沿电力线定向流向带正电的被涂物外表,堆积成附着牢固的一层薄膜如图1所示。
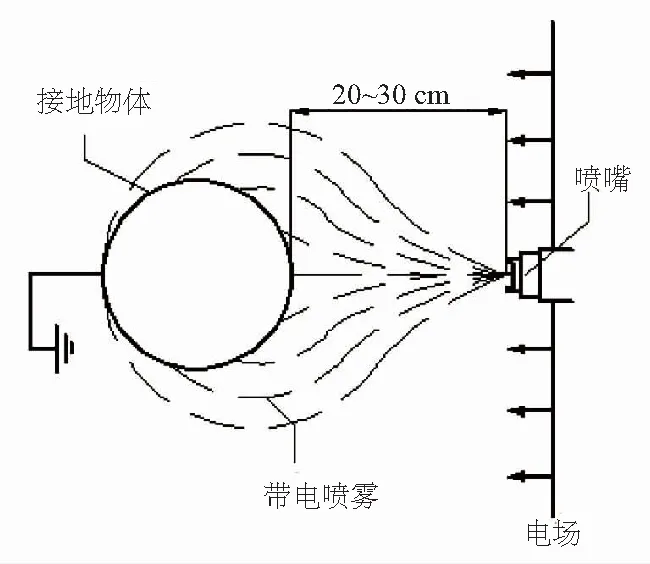
图1 静电喷涂示意图
静电喷涂域中的空间电位可以用泊松方程描述:
(1)
式中:φ为空间电位,ρ为空间电荷密度,ε0为空气介电常数。
在数值模拟过程中考虑空间电荷的作用会使计算时间增长,运算结果更难收敛,吴有金[13]、刘彦娜[14]等通过实验发现空间放电电流比雾化电流小得多,因此忽略空间电荷对感应电场的影响,感应电场的空间电位则可写为:
2φ=0
(2)
静电喷雾场中的电场强度可由式(3)计算得出:
E=-φ
(3)
带电雾滴在静电场中受的电场力为:
FE=E·qp/mp
(4)
式中:FE为单位雾滴质量所受的静电场力,qp/mp为单位雾滴的荷质比。涂料颗粒所带电荷量与其自身质量之比为荷质比,涂料颗粒所带的电荷量与电压、涂料的电导率、涂料颗粒的表面张力等相关,根据文献[15]取荷质比值为4.5×10-6C·kg-1。
用FLUENT模块中的离散相模型(DPM)对喷雾进行模拟,用拉格朗日法求解离散相的轨迹运动方程,雾滴运动方程[16]如式(5):
(5)

2 数值模拟
在ANSYS中建立计算域模型,模型为长600mm,宽600mm,高为250mm的区域,喷嘴与工件之间的距离为250mm。
在ANSYS中对整个计算域进行非结构网格划分,并在喷嘴出口处和喷雾形成区进行网格加密,以提高计算准确度。网格划分后共产生了372 192个节点,2 188 626个单元,如图2所示。研究过程中发现,这个程度的网格划分已较好得出模拟结果,更密的网格划分除计算时间延长外,模拟结果无明显变化。

图2 模型剖面网格
设定空气耗气量为15m3/h,输气管道直径为0.8mm,以80m/s的速度通过输气管道,喷涂环境的风速为0.3m/s,涂料粘度为30 cp,涂料流量为450cm3/min,其他边界设为压力出口边界,采用k-ε湍流模型,二阶迎风格式进行仿真计算。基于FLUENT中MHD电磁场扩展模块,保持其他参数设定值不变,对喷涂电压为-30 kV、-45 kV、-60 kV的喷涂条件分别进行数值模拟,其中喷枪极针设为负高压,工件设为0 V。得到了计算域的电势分布云图和电场强度云图,其中喷涂电压-60 kV的电势分布云图和电场强度云图如图3(a)、图3(b)所示。


图3 -60 kV电势电场强度分布云图
从图3可以看出,电势呈球状对称分布,电场强度与场强等势线之间的距离成反比,极针附近处的电场强度最强。喷涂电压-60 kV时电场强度最大为147 720 kV/m,远离极针的区域,电场强度逐渐下降,工件接地,其附近的电场强度最低。静电喷雾能产生明显环抱效应,由于工件接地,其电势为0 V,一部分喷雾颗粒虽然未能沉积在工件正面,但在电场力的作用下,喷雾颗粒经过曲线轨迹最终沉积在工件侧面和背面,这种现象一定程度上减少了飘散到空气中的涂料,减轻耗散涂料颗粒对环境污染。
喷涂电压-60 kV时的模拟喷涂效果如图4所示,图4(a)为经过中心轴线截面的喷流线图。可以看出,在靠近喷嘴的喷流两侧,有明显的空气回旋现象,这是由于喷雾的快速流动使雾锥与雾锥外侧气体产生压力差而形成的。靠近工件部位有较大空气回旋现象,这是由于喷雾抵达工件,前进受阻形成的。


图4 -60 kV喷涂模拟结果 (m/s)
喷雾到达工件时的速度分布图如图4(b)所示,喷雾颗粒抵达工件时,处于喷雾中心的喷雾颗粒速度最大,从喷雾中心到喷雾边缘,喷雾颗粒速度逐渐递减。在同等时间下,喷雾颗粒速度越大的区域沉积的涂料越多,喷雾颗粒速度分布间接反映了漆膜的厚度分布。
空气喷涂和喷涂电压分别为-30 kV、-60 kV的喷雾粒子轨迹如图5所示。从图中可以看出,由于重力作用,图中下方的粒子轨迹较为发散,喷涂电压-30 kV时喷雾颗粒轨迹路径比空气喷涂时的轨迹路径较为聚拢,未沉积在工件上的喷雾颗粒减少,喷涂电压为-60 kV时喷雾颗粒轨迹较喷涂电压为-30 kV时更加聚拢,未沉积在工件上的喷雾颗粒进一步减少。可以看出,静电喷涂能提高喷雾颗粒的沉积率,在本文研究的范围内(-30 kV~-60 kV),电压越高,沉积率越大,从而降低了排放到空气中油漆量,减少了环境污染。
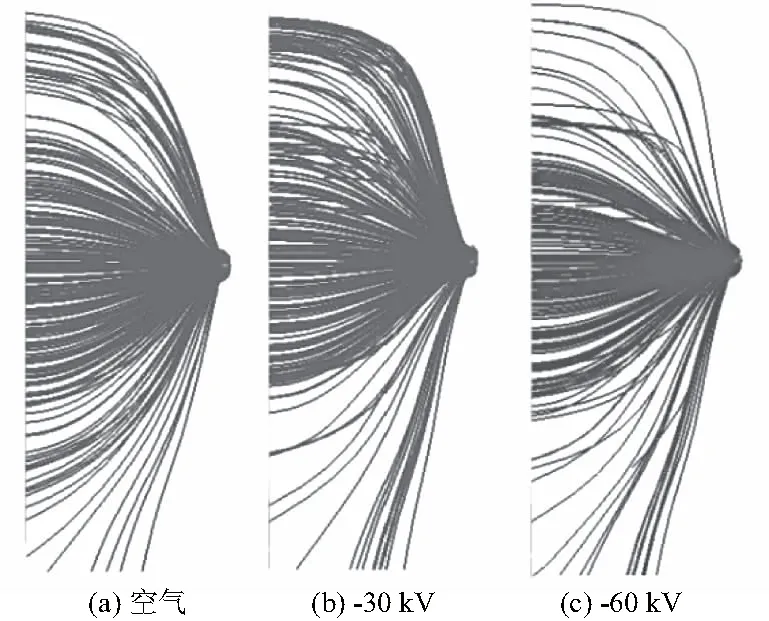
图5 喷雾粒子轨迹
3 试验结果
喷涂试验选用固瑞克Pro XpTM静电空气喷枪喷涂系统,其中包括桶式喷涂机,60 kV智能静电喷枪,气源(空压机),方形板式喷涂工件,如图6所示。

图6 静电喷涂系统试验设备
在实验过程中,为保证安全和良好的试验结果,工件、喷枪、工人、喷涂机、气源都务必接地,气源和喷枪与喷涂机连接完成后,开始喷涂试验,用EC-770涂镀层测厚仪测量数据,数据均为3次测量结果的平均值。
实际喷涂试验时,环境的风速为0.3 m/s,涂料粘度为30 cp,涂料流量450 cm3/min,雾化空气压力0.3 MPa,喷枪垂直于工件,距离工件表面250 mm。空气喷涂、-30 kV喷涂电压、-60 kV喷涂电压时的静态喷涂工件如图7(a)、图7(c)、图7(e)所示。静态喷涂时间为0.3 s,静态喷涂漆膜近似圆形分布与模拟结果图4(b)形状相似。以0.3 m/s的速度直线移动喷枪, 得到空气喷涂、-30 kV喷涂电压、-60 kV喷涂电压时的动态喷涂工件如图7(b)、图7(d)、图7(f)所示。实验结果显示静电喷涂条件下的漆膜比空气喷涂漆膜要大,沉积在工件上的油漆颗粒更多,这与理论分析和模拟结果一致。
使用EC-770涂镀层测厚仪测量漆膜厚度,其工作原理为涡流效应,当探头与带覆层非磁性金属基材紧密接触时,探头使基材产生涡流,涡流对探头的反馈作用与覆层厚度成一定关系,通过检测此反馈量达到测量覆层厚度的目的,测得通过漆膜中心y=0断面上的涂层厚度分布如图8所示。
测量数据显示,漆膜厚度较为均匀。动态漆膜截面形状近似抛物曲线,对测得动态喷涂漆膜厚度数据进行多项式曲线拟合,发现2阶的多项式拟合曲线总是在中间部位低于实际漆膜厚度,而在两侧高过实际漆膜厚度,将多项式拟合曲线修正为4阶时,拟合曲线可与实验数据保持较好一致。
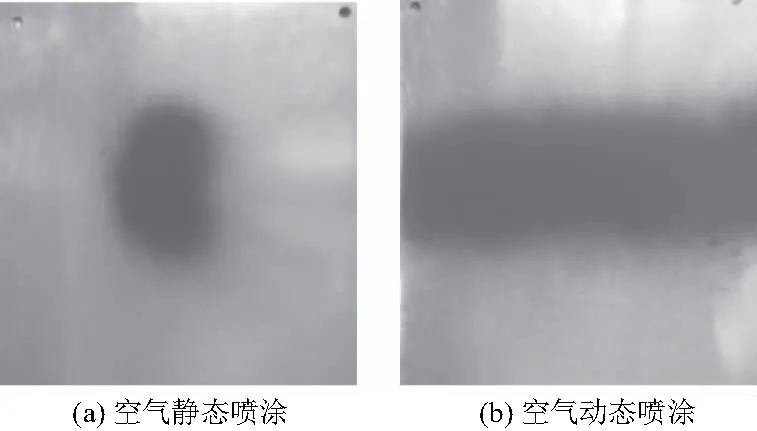


图7 喷漆试件





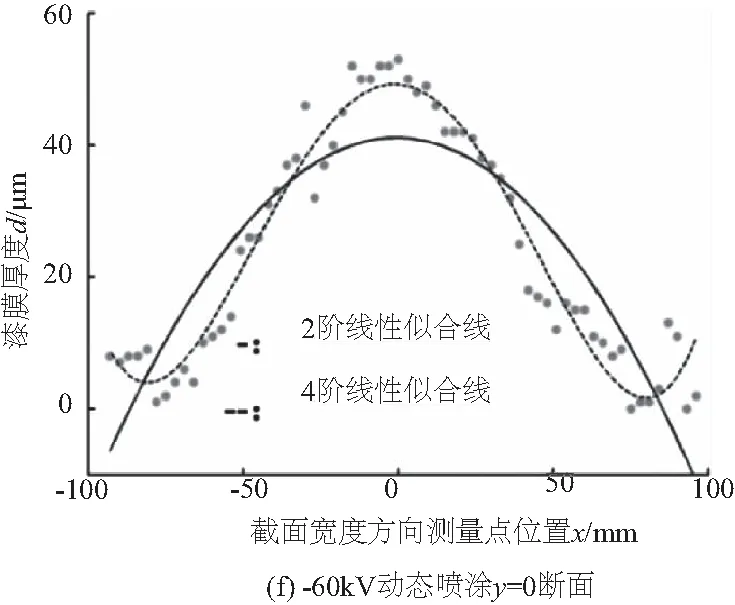
图8 不同喷涂条件下的漆膜断面轮廓测量值
设2阶多项式拟合曲线方程为:
z=ax2+bx+c{z>0}
(8)
4阶多项式拟合曲线方程为:
z=ax4+bx3+cx2+dx+e{z>0}
(9)
采用遗传算法,以拟合数据与实际数据的最小方差和为目标函数,对多项式参数进行寻优计算。
遗传算法的目标函数取为:
(10)
式中:n为x轴上测量点的总数;
zi为xi点处的测量数据;
z(xi)为xi点处拟合得出的理论厚度值。
遗传算法对多项式参数寻找最优解,最终解出拟合方程的各项式系数值和常量值,在此给出喷涂电压为-60kV动态喷涂y=0截面轮廓的多项式拟合曲线的方程。
2阶多项式拟合曲线方程:
z=-0.002 3x2+0.002 6x+23.775 4 {z>0}
(11)
4阶多项式拟合曲线方程:
z=0x4+0x3-0.005 9x2+0.014 7x+27.044 3 {z>0}
(12)
4阶多项式拟合曲线更接近漆膜断面轮廓,说明采用遗传算法进行曲线拟合得到的4阶多项式曲线可以较好地反应静电喷涂动态喷涂漆膜厚度分布,为喷涂机器人轨迹规划提供了一个简单有效的模型。
4 结语
1) 基于ANSYS中FLUENT模块的MHD电磁扩展功能,能够很好地计算电场分布,并进行多场作用下的两相流耦合计算,为静电喷涂技术的研究提供有效途径。
2) 极针与工件之间的区域,电场以极针为中心呈均匀球形对称分布,极针附近的电场强度最强,远离极针的区域,电场强度逐渐减小;在-30 kV~-60 kV范围内,电压越高,喷雾颗粒沉积到工件的效果越好。
3) 通过试验验证了数值模拟的效果,并得到漆雾速度分布图,对漆膜中心截面测量数据拟合,得出漆膜厚度的4阶多项式曲线分布模型,是一种简单有效的模型。
本文主要考虑了有无电场和电场强度变化对漆膜分布的影响,后期的研究会将输气压力、喷枪与工件之间的距离、涂料流量等因素综合考虑来研究这些参数对漆膜分布的影响。
[1] Hyotyiemi H.Minor moves-global results: r-obot trajectory planning[C]//Proceeding of the IE-EE International Conference on Tools for Artifici-al Intel- ligence, Hemdon, VA. USA. Nov., 1990: 16-22.
[2] Antonio J. Optimal trajectory planning for spra-y coating[C]//Proceeding of the IEEE Internation-al Conference on Robotics & Automation, San Di-ego, California, IEEE, 1994, 3:2570-2577.
[3] KLEIN A. CAD-based off-line programming of p-ainting robots[J]. Robotica,1987, 5: 267-271.
[4] 冯川,孙增圻. 机器人喷涂过程中的喷炬建模及仿真研究[J]. 机器人,2003,25(4):353-358.
[5] SUH S H, NOH I K. Development of all automatic trajectory planning system(ATPS)for spray painti-ng robots[C]//Proceedings of the IEEE Internatio-nal Conference on Robotics and Automation, Sac-ramento, CA, 1991,3: 948-1955.
[6] CHEN Heping, SHENG Weihua, XI Ning,et al. A-utomated robot trajectory planning for spray paint-ing of free-form surface in autornotive manufac-turing[C]//Proceeding of the 2002 IEEE Internati-onal Conference on Robotics & Automation. Was-hington, NY: IEEE, 2002,1: 450-455.
[7] Sahir Arikan M A, Balkan T. Process mo-deling, simulation, and paint thickness measurem-ent for robotic spray painting[J]. Journal of Robot-ic Systems, 2000, 17(9):479-494.
[8] 张永贵,黄玉美,高峰,等. 喷涂机器人空气喷枪的新模型[J]. 机械工程学报,2006,42(11):226-233.
[9] J. Domnick, A. Scheibe, Q. Ye, The simulation of the electrostatic spray painting process with high-speed rotary bell atomizers, Part I: Direct chargin-g[C]. Part.Syst. Charact, 2005, 22:141-150.
[10] J. Domnick, A. Scheibe, Q. Ye, The simulation of the electrostatic spray painting process with high-speed rotary bell atomizers, Part II: External Ch-arging[C]. Part. Syst. Charact, 2005, 22: 141-150.
[11] T.I. Zohdi. On the Dynamics of Charged Electro-magnetic Particulate Jets[C]. Arch Comput Met-hods Eng, 2010, 17: 109-135.
[12] David C. Conner, Aaron Greenfield, Prasad N. Atkar, Alfred A. Rizzi, Howie Choset. Paint D-eposition Modeling for Trajectory Planning on Automotive Surfaces[C]. IEEE Transactions on Automation Science and Engineering, 2005,2(4):381-392.
[13] 吴有金,吴亚雷,许晓慧,等. PZT溶胶液静电雾化雾场模拟[J]. 中国科学技术大学学报,2006,36(7):755-760.
[14] 刘彦娜. 静电雾化过程的理论分析与数值模拟[D]. 上海:东华大学环境科学与工程学院, 2009.
[15] 王军锋. 荷电喷雾燃烧的基础研究-燃油静电喷雾及荷电两相湍流射流的研究[D]. 镇江:江苏大学,2002.
[16] Ye Q,Steigleder T,Scheibe A,et al.Numerical simulation of the electrostatic powder coating process with acorona spray gun[J]. Journal of Electrostatics,2002,54(2):189-205.
猜你喜欢
小哥白尼(趣味科学)(2022年2期)2022-05-25
能源工程(2021年1期)2021-04-13
汽车维护与修理(2021年2期)2021-02-03
山东化工(2020年20期)2020-11-25
孩子(2020年11期)2020-11-17
润滑油(2020年1期)2020-03-09
趣味(数学)(2019年6期)2019-10-17
汽车实用技术(2019年16期)2019-09-11
酒·饮料技术装备(2018年1期)2018-04-28
中国有色冶金(2018年1期)2018-02-01