
一种基于激光跟踪技术的风载运动测量方法
2018-07-06 09:24袁乾臣张俊楠杨秀山
导弹与航天运载技术 2018年3期
袁乾臣,杨 欢,张俊楠,杨秀山,张 捷
0 引 言
为提高飞行器发射装置使用性能,目前新型发射装置普遍采用无支腿软支撑直接与车架固连的方式,受风载影响较大,可能会对惯性器件工作及垂直初始对准等造成影响,因此需要对发射装置特定位置在风载条件下的六自由度位置姿态变化、各向晃动频率和幅值等动态特性进行测量及分析。
目前对飞行器发射装置的风载特性测量多采用加速度传感器或位移传感器进行测量的方式,由于传感器的局限性,难以实现全面的六自由度测量。本文使用激光跟踪系统[1,2]设计一种发射装置风载动态特性测量和分析方法,可以满足发射装置风载动态响应六自由度测量的需要。
1 激光跟踪测量原理
激光跟踪系统由激光跟踪仪和目标靶镜(跟踪球)组成,如图1所示。目标靶镜的反射特征是出射光线与入射光线平行,因此激光跟踪仪在跟踪目标靶镜时,出射光与返回光会存在位移偏差,通过此偏差量控制跟踪仪二维转动,保持实时跟踪。
激光跟踪仪可跟踪测量目标靶镜的水平角、垂直角和斜距,通过极坐标原理就可得到目标靶镜的空间三维坐标。
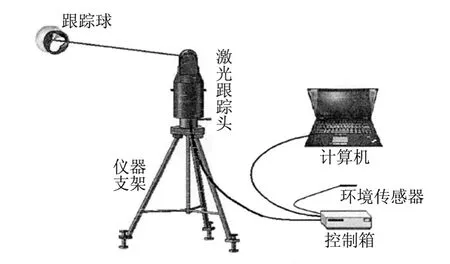
图1 激光跟踪系统组成Fig.1 Laser Tracking System Composition
2 测量技术方案
根据发射装置被测位置的外形、尺寸及机械接口设计环绕发射装置的工装,通过工装在被测位置周向均匀分布安装3个目标靶镜,工装与发射装置刚性连接。使用与3个目标靶镜对应的激光跟踪仪进行激光跟踪测量(3个激光跟踪仪预先布置,并建立统一的测量坐标系[2]),可得3个目标靶镜的空间三维坐标,通过进一步的计算,即可得工装所在位置的六自由度位置姿态变化、各向晃动频率和幅值等动态特性。
发射装置风载动态特性激光跟踪测量示意如图 2所示。
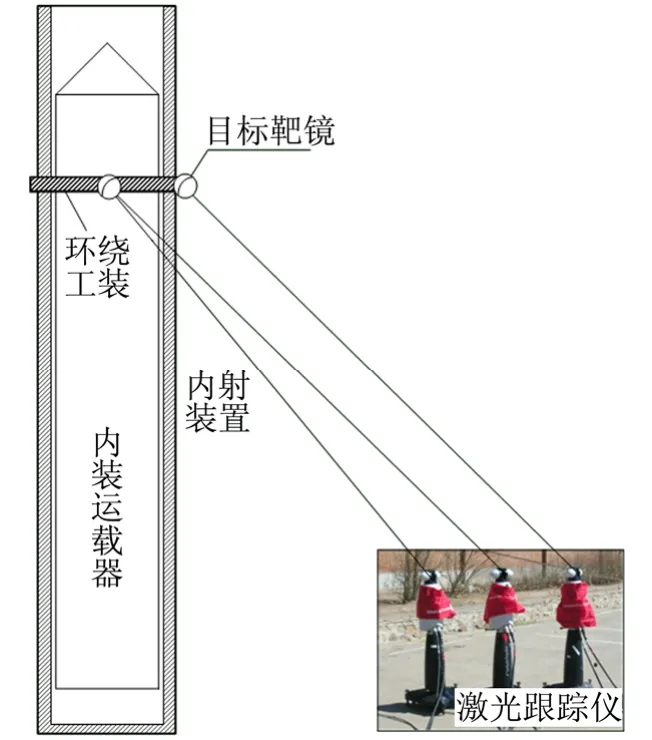
图2 发射装置风载动态特性激光跟踪测量示意Fig.2 Laser Tracking Measurement of the Motion Characteristics of Aerocraft Launching Units under the Wind Load
2.1 建立测量坐标系
按照如下步骤建立测量坐标系[3~8]:
a)在测量点周围20 m通视范围内布置4个目标点T1~T4,测量设备布局如图3所示。
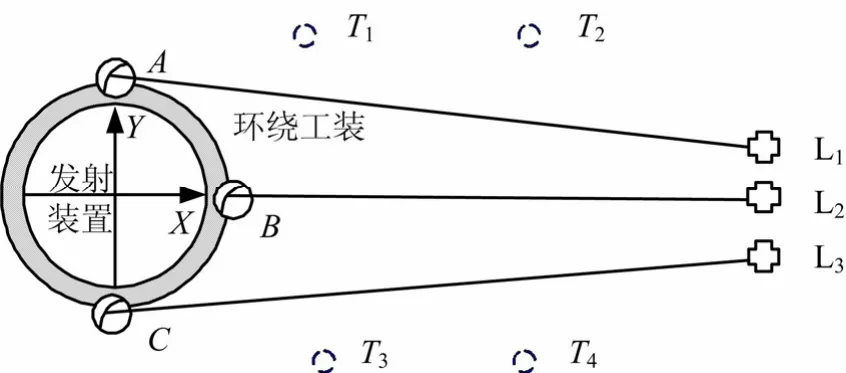
图3 激光跟踪测量设备布局示意(俯视图)Fig.3 Laser Tracking Measurement Equipment Layout(top view)
b)使用3台激光跟踪仪L1~L3依次测量4个目标点,得出测量坐标系下的点位坐标,具体方法如下:
使用激光跟踪仪测出目标点的斜距S、水平方位角ψ和垂直方位角β,那么目标点在测量坐标系下的坐标为

c)将 L2、L3激光跟踪仪的测量坐标系统一到 L1测量坐标系上,具体方法如下:
激光跟踪仪L1~L3按照相同顺序,分别测量T1~T4位置临时放置的目标靶镜,由式(1)可得4个目标点位的坐标(Xlt, Ylt, Zlt)( l = 1 ,2,3; t =1,2,3,4),由此可以求得矩阵C21,C31(姿态转换)与矢量ΔV21,ΔV31(位置转换),使得:

d)使用陀螺经纬仪引入北向,使用激光跟踪仪L1与陀螺经纬仪对瞄得到相对于陀螺经纬仪的水平方位角V和垂直方位角M,进一步求出L1测量坐标系到地理坐标系的转换矩阵 (,)fVM=C ,即可将测量数据转换到地理坐标系下。
2.2 发射装置风载跟踪测量
使用风速风向仪测得地理坐标系下的风速及风向,根据测量工况的要求调整好发射车与风向的角度后竖起发射装置。
动态跟踪测量过程中,激光跟踪系统与风速测量装置接收时间零点信号后开始记录数据,每帧数据都带有时戳(相对零点的时间),由3台激光跟踪仪分别测量3个目标靶镜,采用插值法可得到3个目标靶镜在地理坐标系下的坐标及对应时刻的风速。具体方法如下:
对于第i次风载动态响应试验,以带有 Tij时戳的测试数据为例:任意一个 Tf时刻,从风速风向仪及激光跟踪系统测试数据文件中寻找 Tij和 Ti(j+1),使得Tij≤ Tf≤ Ti(j+1)。将风速风向仪和激光跟踪系统对应 Tij和T i(j+1)的数据采用一阶插值的方法拟合到时刻点 Tf上,从而可以获得任意时刻风速、风向和目标靶镜位置坐标。
2.3 风载动态响应解算
得到3个目标靶镜在风载条件下的位置数据后,可进一步分析得到 3个目标靶镜所定义的空间姿态、晃动频率及幅值。具体方法如下:
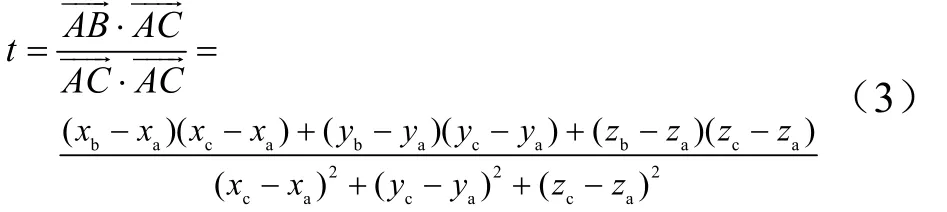
如图4所示,用A、B、C 3点代表在环绕发射装置的工装上安装的3个目标靶镜的位置,A、B、C 3点地理系坐标点位(xi, yi, zi),i=a,b,c,从B点向引一条垂线,垂足OM的坐标为(xm, ym, zm),计算出方位角ψx,不水平角βx、不水平角βy,即求出3点所定义的空间姿态。

图4 激光跟踪测量数据解算示意Fig.4 Laser Tracking Measurement Data Solution
设-,那么有:
进一步求得OM坐标:
垂足 OM坐标随时间的变化频率和幅值即代表发射装置被测位置在风载条件下的各向晃动频率和幅值。
根据式(5)可求得的方位角ψx和不水平角βx:

根据式(6)可求得的不水平角:

激光跟踪主机位置测量精度为0.2 mm,最大采样频率为100 Hz,该解算方法得到姿态解算精度为15″。
3 应用情况
该测量方法已在某飞行器的风载试验中进行应用,该试验目的是得到发射装置在大风作用下的晃动幅值、频率及滚转方向的角度变化量。试验中,使用工装将3个目标靶镜安装在发射装置上部,在大风条件下进行激光跟踪测量,并对数据进行处理、解算,得到发射装置的晃动幅值、频率及滚转方向的角度变化量。
某段时间激光跟踪测量解算出的发射装置 X方向位移数据如图5所示。由图5可以看出,在1988 s到1993 s的5 s时间内,有6个完整波形,频率为1.2 Hz,最大振幅约在0.22 mm左右。
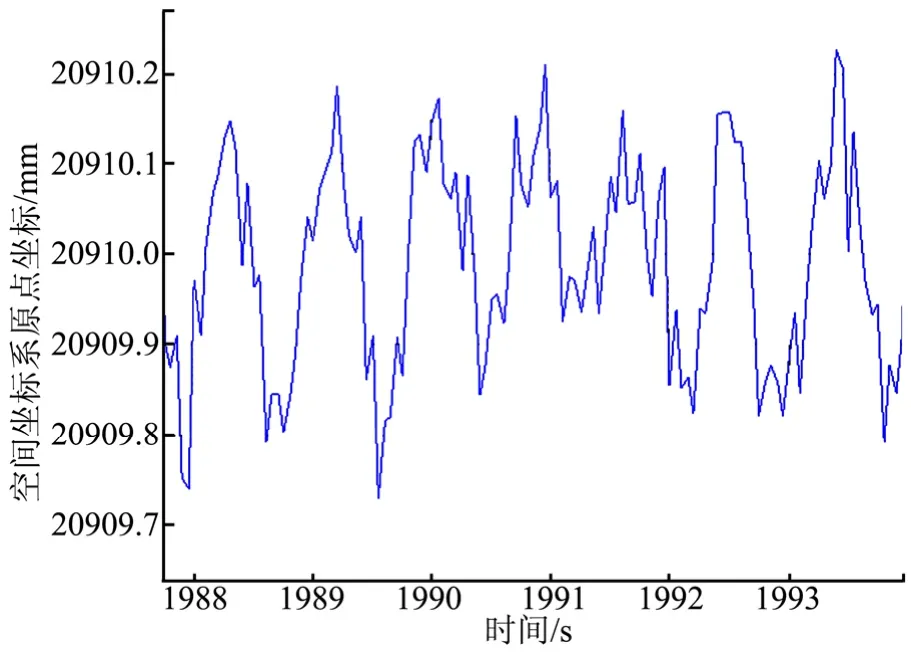
图5 X方向晃动位移解算数据Fig.5 Swing Displacement Solution Data in X Direction
某段时间激光跟踪测量解算出的发射装置滚转角数据如图6所示。在1 h 20 min的时间中,发射装置角度变化约为0.07°。
本次试验中,通过激光跟踪测量取得了发射装置在各风况条件下的动态响应,得到了发射装置在大风作用下的晃动幅值、频率及滚转方向的角度变化量等关键数据,为后续进行瞄准系统设计提供了重要参数支撑。

图6 滚转角解算数据Fig.6 Roll Angle Solution Data
4 结束语
本文中的激光跟踪测量方法可以直接测量出发射装置被测位置的位移动态特性,经过进一步计算可得到被测位置的姿态变化、晃动频率及幅值等动态特性。
该测量方法已在某飞行器的风载试验中得到,通过测量解算获取了发射装置在大风作用下的晃动幅值、频率及滚转方向角度变化量,为开展瞄准系统设计提供了参数依据。该测量方法同样适用于运载火箭发射装置等与地面为弱支撑的竖直结构风载动态测量。
[1] 郇宝贵. 便携式激光跟踪仪电控系统设计与实现[D]. 西安: 西北工业大学, 2012.
Huan Baogui. Design and realization of electric control system of portable laser tracker[D]. Xi’an: Northwestern Polytechnical University, 2012.
[2] 侯宝芬. 6D 精密激光跟踪测量技术的研究[D]. 西安: 中国科学院西安光学精密机械研究所, 2012.
Hou Baofen. The research of 6D precision laser tracking measurement techniques[D]. Xi’an: Xi’an Institute of Optics and Precision Mechanics of Chinese Academy of Science, 2012.
[3] 张振友. 物体空间姿态实时工业测量及动态性能研究[D]. 上海: 上海大学, 2009.
Zhang Zhenyou. Research on real-time measurement method for objects space attitude and dynamic characteristics[D]. Shanghai: Shanghai University, 2009.
[4] 冯祝雷. 一种基于激光跟踪仪的地理坐标系建立方法[J]. 机械制造,2015(53): 59-61.
Feng Zhulei. A method of establishing a geographical coordinate system based on a laser tracker[J]. Machinery, 2015(53): 59-61.
[5] 黄文鑫. 物体空间位置的实时测量方法研究[J]. 机械传动, 2011, 35(8):20-24.
Huang Wenxin. Research on real-time measurement method for object spatial location[J]. Journal of Mechanical Transmission, 2011, 35(8):20-24.
[6] 刘永东. 距离法运动目标激光跟踪测量系统的研究[J]. 光学仪器, 2001,23(3): 12-16.
Liu Yongdong. Laser tracking system for coordinate measurement of moving target by length-measured method[J]. Optical Instruments, 2001,35(8): 12-16.
[7] 刘永东. 运动目标空间位置坐标激光跟踪测量的数学模型[J]. 光学技术, 1997, 6(4): 30-33.
Liu Yongdong. Mathematical model of laser tracking measuring of moving targets[J]. Optical Technique, 1997, 6(4): 30-33.
[8] Nakamura O, et al. Development of a coordinate measuring system with tracking laser interferometers[J]. Annals of the CIRP, 1991, 40(1): 523-526.
猜你喜欢
装备维修技术(2022年7期)2022-07-01
导航定位学报(2022年2期)2022-04-11
数字海洋与水下攻防(2021年5期)2021-11-04
弹箭与制导学报(2019年5期)2019-05-28
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中国新技术新产品(2018年22期)2018-01-05
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中国科技纵横(2016年23期)2017-04-06
筑路机械与施工机械化(2016年12期)2017-01-13
