
基于慧鱼组件的自行车停车装置
2018-07-06 07:08史志慧吴何畏李月寒齐海宁
机械管理开发 2018年6期
史志慧, 吴何畏, 陈 新, 李月寒, 张 武, 齐海宁
(湖北文理学院, 湖北 襄阳 441053)
引言
为解决现有小区自行车停车难的问题,提高场地利用率,提高停车效率等满足人们对小区自行车停放的要求,同时促进我国小区建设的发展。我们设计了一种全自动草坪空中自行车停车装置。该停车场选址新颖独特,结构简单可靠,性能稳定,存取车简单方便,实用性强。可以高效便捷的存取自行车,同时空中停车场不影响小区绿化建设,兼顾解决问题和绿化建设。不仅适用于已有小区的停车场规划,对小区规划建设也是一个很好的参考。
1 总体结构
全自动草坪空中自行车停车装置,分为上下两层共有12个停车位。主要由单轨悬吊轨道结构、桁架下的机械手结构、双滑块连接的自锁式吊钩、自动门结构以及ROBOPRO和PLC相结合的控制系统等组成[1],如图1所示。自锁式吊钩在起始停车位上固定自行车,可自锁结构增加自行车悬挂的稳定性;电机控制机械手三轴向移动到停车位并控制机械臂触近滑块,同时控制手爪抓住滑块;在单轨悬吊轨道上,滑块带动万向轮在轨道上行走,即吊钩在轨道上行走并带动悬吊在正下方的自行车移动;通过实现自行车在起始停车位与停车位之间的移动实现存取[2]。
1.1 单轨悬吊轨道结构设计
该轨道也称悬臂式立体自行车库停靠架,停靠架长度为一个自行车全长,所述停靠架用做放置方形小车,所述小车下面带有两个挂钩,通过停靠架缝隙悬置自行车,小车在悬臂式停车架上运动可以带动悬空的自行车,达到存取自行车的目的。
1.2 桁架机械手结构[3-5]
机械手倒立结构固定在桁架上,机械手又包括抓取机构和传送机构,抓取机构包括手指、传力机构等,主要是用来抓取和放置工件(或工具)的部件;传送机构包括手腕、手臂等,主要是改变选定目标的方向和位置,如图2所示。
该停车装置的运动部分均由机械手来完成。下面通过建立机械手手爪与吊钩上滑块之间的运动关系对机构进行运动分析。机械手的运动过程如下:
1)当执行存车命令时,机械手抓住吊钩上的滑块水平移动到起始停车位,抓取动作可以通过吸盘、气动手指和杠杆机构等完成。
2)若存入第一层停车位,机械手水平移动到指定位置即可。若存入第二层停车位,机械手抓取吊钩上的滑块沿Z轴方向垂直上升到第二层对接起始轨道。再在平面上移动将自行车送至相应停车位即完成存车命令。
3)停车完成后机械手沿上述轨迹反方向运动到起点待命。
4)当执行取车命令时,若取第一层自行车,机械手沿X轴方向将吊钩抓住,在水平移动到起始停车位。若取第二层自行车,机械手沿X轴方向抓住吊钩再通过Z轴的升降运动将吊钩释放到指定轨道对接点即完成取车命令。
5)机械手沿上述轨迹反方向运动到起始点待命,开始下一个循环。

图1 总体结构图
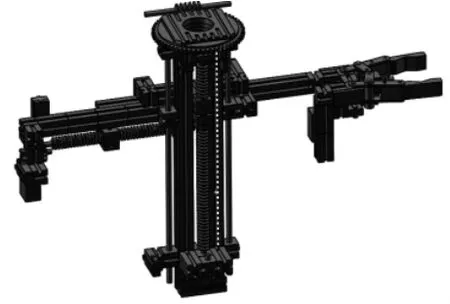
图2 机械手结构图
根据控制要求,旋转运动和X轴方向的直线运动可以同时进行。
机械手主要由传输机构、运动机构、控制系统三大部分组成(如图3所示)。

图3 机械手控制构成图
运动机构使手部完成各种转动、移动或复合运动来实现既定动作,改变被抓持部件的方向和位置。驱使其运动的动力源,常用的有液压、气压、电力和机械四种驱动形式。本文设计的机械手采用的是电力驱动。
控制系统是通过对机械手每个自由度电机的控制,来完成动作的程序、位置和时间(甚至速度与加速度)等,是机械手动作的指挥系统。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或DSP等微控制芯片构成,通过对其编程实见所要求的功能。本文设计的控制系统采用的是慧鱼编程软件PROROBOTXT。
1.3 自锁式吊钩结构
该结构由两个滑块、滑块上的万向轮及滑块下的吊钩组成[6-7],如图4所示。其中吊钩由三个钩子组成,其设计思路是满足自行车固定要求。上面滑块与下面滑块刚性连接,下面滑块与吊钩刚性连接,整个结构稳定。
1)钩子的数量及位置布置起到了自锁性功能。单个钩子钩住自行车座,双钩子对称钩住自行车把手,既满足了自行车的固定作用,也起到了自锁作用。当自行车受很大径向拉力时不易脱离吊钩。
2)机械手抓住滑块使整个吊钩在轨道上移动。当吊钩在第一层存取时,下面滑块的万向轮在轨道上移动;当吊钩在第二层存取时,上面滑块的万向轮在轨道上移动。
3)万向轮在轨道上行驶,接触面的摩擦较小、灵活的转向提高了吊钩在轨道上的运动速度。
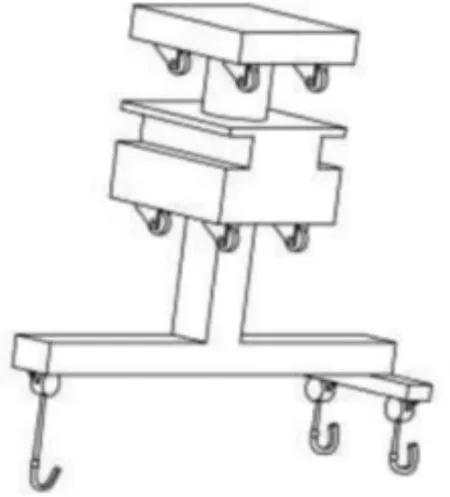
图4 吊钩结构图
1.4 自动门结构[8-12]
自动门是单滑门结构;单滑门结构只有一扇门,开合运动结构简单、相对于双滑门比较好控制、节约成本但占用空间稍大。实际应用中可操作性高,所以更加适用于停车装置做库门。自动门由光敏传感器、微动开关等元件组成,当有物体经过门时,光敏传感器反馈信息给控制器,控制器控制门开合。即存取车时当人进门和出门时门会自动开合。
2 工艺流程分析
自行车存取的过程如图5所示:
存车时,自行车沿地面推送至入库门,车到达设定位置时,按下存车按钮。智能管理系统通过无线通讯技术获取该自行车ID并分配停车位,用户获取ID后即完成操作。

图5 自行车存取流程图
入库登记程序完成后,ROBOPRO[13-15]控制的机械手伸出,从吊钩停放架上抓住吊钩至库门,钩子固定待存自行车,机械手再将吊钩送入相应停车位轨道,即自行车入库。并在PLC管理的存、取自行车系统中完成登记。
取车时,用户在出库门输入ID,PLC控制的智能管理系统检索ID对应自行车,ROBOPRO控制的机械手到达指定停车位,抓取吊钩将快吊钩送至出库门,即自行车出库。待自行车取走后将吊钩放回停放架。
3 结论
本设计具有环保、便捷、拓展性强等特点。机械手控制自行车的存取快捷方便;小单元化系统体积不大,相比于传统存取装置更加节约空间且拓展性强;无底板的空中悬吊式停车更节省材料;轨道上运行优化了停车路线;透明亚克力做顶棚透光性强,白天不影响草坪绿化,晚上保障自行车安全。此停车装置的出现,一定程度上解决了已有小区自行车停车场困难的现象,独特新颖的空中草坪自行车停车装置在现代化城市有着极佳的市场前景和应用值。
[1]朱世强,王宣银.机器人技术及其应用[M].浙江:浙江大学出版社,2001.
[2]翁海珊.机械原理与机械设计课程实践教学汇编[M].北京:高教出版社,2008.
[3]郭洪红.工业机器人技术[M].西安:西安电子科技大学出版社,2006.
[4]王培林.工业机械手设计[M].北京:机械工业出版社,2009.
[5]涵锐,荣毅虹.机械手的创新设计[M].哈尔滨:哈尔滨工业大学出版社,2006.
[6]强建国.机械原理创新设计[M].武汉:华中科技大学出版社,2008.
[7]黄继昌,徐巧鱼,张海贵.实用机构图册[M].北京:机械工业出版社,2008.
[8]李瑞琴.机构系统创新设计[M].北京:国防工业出版社,2008.
[9]冯清秀,邓星钟.机电传动控制:第5版[M].武汉:华中科技大学出版社,2013.
[10]谢桂林.电力拖动与控制 [M].北京:中国矿业大学出版社,2010.
[11]邱宣怀.机械设计:第4版[M].北京:高等教育出版社,2011.
[12]闻邦椿.机械设计手册:第6版[M].北京:机械工业出版社,2011.
[13]孙桓,陈作模,葛文杰.机械原理:第7版[M].北京:高等教育出版社,2012.
[14]慧鱼六合一手册[Z].北京:北京中教仪科技有限公司,2005.
[15]Fischertechnik GmbH.慧鱼创意组合模型用户手册[Z].Fischer Group ofcompanies,2009.
猜你喜欢
南方农机(2023年1期)2023-01-22
装备制造技术(2020年4期)2020-12-25
英语文摘(2020年7期)2020-09-21
数学小灵通(1-2年级)(2019年5期)2019-05-21
自然资源情报(2018年7期)2018-12-28
制造技术与机床(2018年11期)2018-11-23
遵义(2018年13期)2018-08-08
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
铸造设备与工艺(2015年3期)2015-07-11
