
四旋翼飞行器PID控制器设计
2018-07-10 03:39焦青松
天津职业技术师范大学学报 2018年2期
焦青松 ,刘 佳
(1.天津职业技术师范大学天津市信息传感与智能控制重点实验室,天津 300222;2.天津职业技术师范大学自动化与电气工程学院,天津 300222)
无人驾驶飞机简称无人机,它是一种可通过远程遥控和自身程序控制装置操作,能够在无人控制下实现自主飞行同时可执行一定任务的飞行器。四旋翼飞行器作为极具代表性的无人机,因其结构简单,成为了广大科研爱好者在控制领域研究的焦点。其4个旋翼作为飞行器所需动力的直接来源,均匀分布在机体的前后左右4个方向,并以对称的方式固定安装在刚性十字形交叉结构上。为使四旋翼飞行器在飞行过程中产生的反扭力矩得到进一步消除,在转动时应遵循“同一对角线上的旋翼具有旋转方向相同的转速,邻近的旋翼具有旋转方向相反的转速”这一基本原则。相比于普通飞机而言,四旋翼飞行器最突出的优点是体积小、质量轻、控制简单且机动性能灵活,可实现平移和旋转等飞行动作,广泛应用于影视、消防、电力、农业和快递等行业以及军事相关领域[1]。四旋翼飞行器在空间上,沿3个坐标轴平移3个线自由度和绕3个坐标轴旋转3个角自由度作为四旋翼飞行器的6个自由度,通过较强的耦合关系体现在相应的动力学模型中,同时姿态角对其位置坐标的变化起着决定性作用,从而直接影响其控制效果。近年来,随着现代控制理论的不断涌现并趋向于成熟化,相当多的控制理论和算法被应用到四旋翼飞行器控制系统中。例如,美国宾夕法尼亚大学对四旋翼飞行器控制系统进行了精确的建模分析,同时提出采用线性反馈控制法和反步控制法来控制四旋翼飞行器控制系统[2]。此外,自适应控制、滑模控制、自抗扰控制、模糊控制[3-6]等控制方法也被成功地应用于四旋翼飞行器控制系统。非线性控制领域对于四旋翼飞行器动力学模型的建立有较高的精确性,而PID控制器可有效解决其在建模过程中存在的稳态误差这一难点。本文通过对其位置和姿态角进行PID控制器的设计,进而对四旋翼飞行器的3个位置坐标和3个姿态角进行有效控制。
1 四旋翼飞行器模型及分析
考虑到四旋翼飞行器在运动过程中存在多种物理效应,直接影响着其受力分析,其原始动力学模型是相当复杂的[7]。为使控制系统的设计过程进一步简化,需要忽略四旋翼飞行器原始动力学模型的陀螺效应项和摩擦阻力项,对其非线性动力学模型做进一步简化处理,最终被简化处理后的非线性动力学模型[8]为:
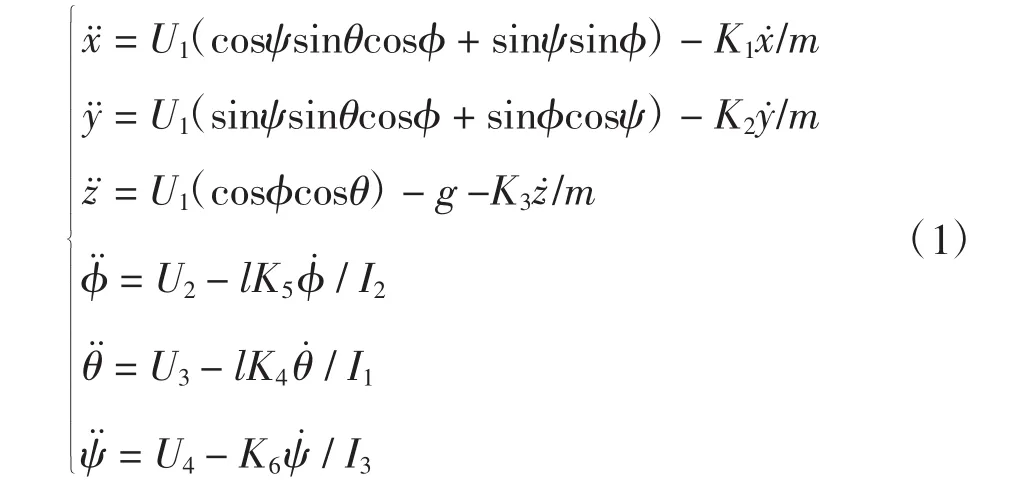
式中:(x,y,z)为在地面坐标系下四旋翼飞行器空间的位置;(φ,θ,ψ)为在其坐标系下四旋翼飞行器在空间的姿态,分别代表滚转角、俯仰角和偏航角;Ui(i=1,2,3,4)为飞行器动力学模型的4个独立虚拟控制输入量;Ki(i=1,2,3,4,5,6)为阻力系数;Ii(i=1,2,3)为飞行器分别绕x轴、y轴和z轴旋转时的转动惯量;m为飞行器机体的质量;l为飞行器机体质心与其旋翼旋转轴二者之间的距离;g为地球表面的重力加速度。
在控制工程的实际应用方面,通过四旋翼飞行器控制系统的 6 个控制输出量(x,y,z,φ,θ,ψ),可描述四旋翼飞行器在三维空间内的具体飞行状态。在每个旋翼上安装电动机转子的目的是为四旋翼飞行器提供运动过程中所需要的升力和滚转力矩、俯仰力矩以及偏航力矩,分别用 U1、U2、U3和 U4表示,将(U1,U2,U3,U4)直接输入到四旋翼飞行器控制系统的动力学模型中。根据四旋翼飞行器动力学模型“输入量与输出量个数的大小关系”这一判断准则可知,四旋翼飞行器控制系统可被视为一个典型的4输入、6输出的欠驱动系统[9]。
在控制四旋翼飞行器控制系统时必然存在变量之间的耦合现象。针对其变量之间存在相互耦合关系的控制系统的PID控制器设计问题,需分别设计位置和姿态这2个控制回路。
2 四旋翼飞行器控制系统PID控制
2.1 PID控制理论
PID控制器是以抑制控制系统所产生的干扰和系统误差为控制目标而进行设计的。其控制系统的控制原理如图1所示。
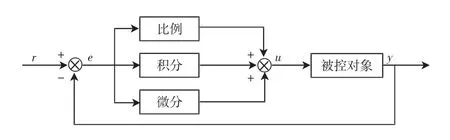
图1 PID控制系统的控制原理
由图1可知,r为控制系统的控制输入;y为控制系统的控制输出;e为控制系统的稳态误差,通过对比例环节、积分环节和微分环节进行线性叠加即可得到控制量u,进而控制其被控对象。表达式为:

式中:KP为比例系数;K1为积分系数;KD为微分系数。此3个参数均对控制系统的性能起着决定性作用。
PID控制器的控制作用主要包括比例控制、积分控制和微分控制[10-11]。
2.2 四旋翼飞行器PID控制器的设计
2.2.1 四旋翼飞行器控制系统的结构
对四旋翼飞行器的结构呈十字模式或X模式。在运动过程中,通过改变4个旋翼上电动机的转速来对其4个旋翼的转速进行调节,进而使其在飞行过程中的升力发生变化,从而可有效实现其位置坐标(x,y,z)控制以及姿态角(φ,θ,ψ)控制。在四旋翼飞行器控制系统中,其线自由度和角自由度二者之间存在较强的耦合作用。所以,在对四旋翼飞行器进行控制时需充分考虑各个输出量之间的耦合关系。在设计PID控制器时,需设计位置环和姿态环,这2个控制环分别作为该控制系统的外环和内环。通过位置环和姿态环分别设计PID控制器,使控制器可有效控制其位置和姿态。四旋翼飞行器控制系统结构如图2所示。
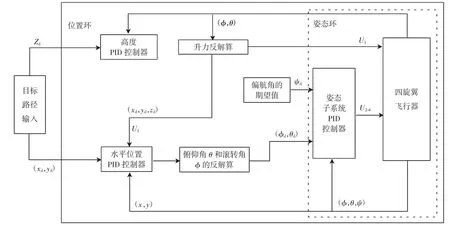
图2 四旋翼飞行器控制系统结构
由图2可知,四旋翼飞行器控制系统的输入为位置(x,y,z)的期望值(xd,yd,zd)与其偏航角 ψ 的期望值ψd;水平PID控制器和高度PID控制器的输入为位置坐标的期望值与实际输出值的差值;姿态子系统PID控制器的输入为姿态角的期望值与实际输出值的差值;输出为(U1,U2,U3,U4),这 4 个控制量被输入到四旋翼飞行器动力学模型中,最终3个位置坐标(x,y,z)和 3个姿态角(φ,θ,ψ)作为四旋翼飞行器的动力学模型的控制输出量。具体地说,控制量U2为四旋翼飞行器的滚转通道;U3为四旋翼飞行器的俯仰通道;U4为四旋翼飞行器的偏航通道;控制量U1为位置坐标(x,y,z)的控制输入量。因此,控制该系统时,可将其分解为以U2、U3、U4为控制输入的姿态控制和以U1为控制输入的位置控制[12]。
2.2.2 姿态控制器设计
姿态角控制回路作为四旋翼飞行器控制系统的内环,由滚转角φ、俯仰角θ和偏航角ψ这3个独立的控制回路组成,因此可将这3个独立的姿态控制回路分别进行PID控制器的设计。
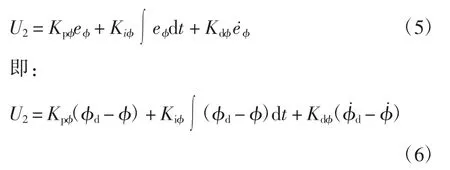
以滚转角回路为例,其动力学方程为:

式中:设φd为滚转角的期望值;φ为滚转角的实际输出值;误差eφ为滚转角的期望值与实际输出值的差值,即:

因此,滚转角回路的控制器可写为:
同理,俯仰角回路控制器和偏航角回路控制器分别为:

式中:θd为俯仰角的期望值;ψd为偏航角的期望值;θ和ψ均为实际输出值。
2.3 位置控制器设计
当控制四旋翼飞行器的位置时,可将其划分为高度控制回路和水平位置控制回路,分别对这2部分独立控制回路进行控制。高度控制满足式(9),水平位置控制满足式(10)和式(11)。

定义位置坐标(x,y,z)的期望值为(xd,yd,zd),垂直方向上和水平方向上的控制通道均采用PID控制法,其控制算法为:
根据式(9)和式(12)可得升力U1的表达式为:
根据式(10)与式(11)可反解出滚转角φ和俯仰角θ的期望值φd和θd,滚转角φ的期望值φd的表达式为:
俯仰角θ的期望值θd的表达式为:

3 仿真结果及分析
对图2所设计的四旋翼飞行器控制系统的结构进行Matlab/Simulink仿真平台搭建,分别对其输出的6个自由度进行理论结果的仿真实验,以验证基于PID的控制法对其控制系统进行控制的有效性。文献[12]列出了四旋翼飞行器动力学模型的具体参数:
K1=K2=K3=0.10,K4=K5=K6=0.12,I1=I2=1.25,I3=2.5,m=2 kg,l=0.2 m,g=9.8 m/s2。
比例系数、积分系数和微分系数在PID控制器的设计中起着决定性作用。在四旋翼飞行器控制系统中,由于位置坐标和姿态角之间存在耦合作用,因此在设计PID控制器时,需先调节内环的姿态PID控制器的参数,直到内环达到稳态为止,再对外环位置PID控制器的参数进行调节。
PID控制方法被应用于四旋翼飞行器控制系统中的一个重要原因即该控制方法具有较强的鲁棒性,为了有效地描述该控制方法,通过控制系统的位置坐标响应曲线和姿态角响应曲线说明使用该控制方法的有效性。
假设四旋翼飞行器控制系统的位置坐标(x,y,z)的初始值为(0,0,0),期望值(xd,yd,zd)为(10,20,40),滚转角和俯仰角的初始值分别为30°和20°,滚转角和俯仰角最终收敛到0°,偏航角ψ的初始值为0°,偏航角的期望值ψd为45°。
经过调试可得到位置PID控制器和姿态PID控制器的参数:
Kpx=Kpy=10,Kix=Kiy=1,Kdx=Kdy=3;Kpz=30,Kiz=3,Kdz=10;Kpφ=Kpθ=15,Kiφ=Kiθ=0.1,Kdφ=Kdθ=25;Kpψ=40,Kiψ=0.1,Kdψ=20。
通过对四旋翼飞行器控制系统进行仿真得到控制系统的位置坐标响应曲线和姿态角响应曲线,分别如图3和图4所示。
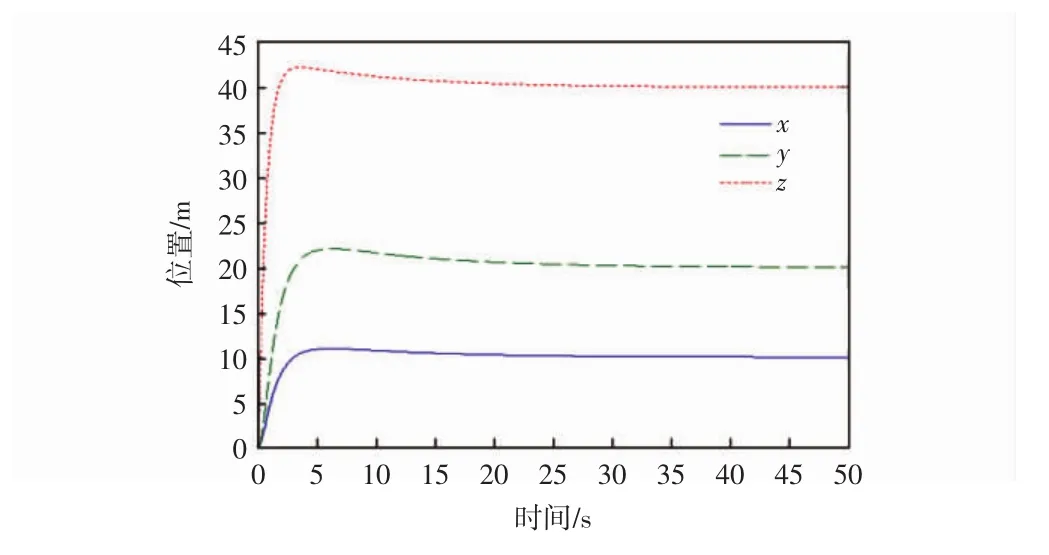
图3 位置坐标响应曲线
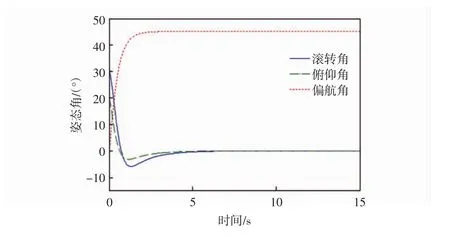
图4 姿态角响应曲线
由图3和图4可知:位置坐标x、y、z的超调量分别为9.1%、10%和6.1%,达到稳定所需的时间分别为33 s、40.5 s和41.5 s;姿态角φ和θ的超调量分别为16%和18.3%,偏航角的超调量为0,达到稳定所需时间分别为7 s、6 s和3s。因此,从位置坐标和姿态角这二者的超调量和达到稳定所需时间可以得出:位置坐标x、y、z的超调量在10%及以内,但是达到稳态所需时间均大于30 s;姿态角φ、θ和ψ中除了偏航角的超调量为0外,其他2个角度均存在超调,超调量均大于15%,但是姿态角φ、θ和ψ三者达到稳定所需时间均在10 s以内。总之,通过对四旋翼飞行器控制系统的位置和姿态6个自由度的设计,可使其6个自由度最终的输出值等于期望值。而在超调量和达到稳态所需时间方面,位置坐标的超调量较小,达到稳态所需的时间较长;而姿态角的超调量较大,很快就能达到稳定状态。因此,控制效果较为理想。
4 结语
本文对四旋翼飞行器的位置坐标和姿态角进行PID控制器的设计,进而对其飞行的位置和姿态进行有效控制,通过对PID控制器参数的调节得到该控制系统输出的仿真结果。仿真结果表明,该控制算法能有效地对四旋翼飞行器进行位置控制和姿态控制,动态性能良好。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
模具制造(2019年10期)2020-01-06
电子制作(2019年9期)2019-05-30
军事运筹与系统工程(2017年1期)2017-07-31
北京航空航天大学学报(2016年8期)2016-11-16
课程教育研究·学法教法研究(2016年19期)2016-09-07
中学课程辅导·教师教育(中)(2016年6期)2016-07-02
探测与控制学报(2015年4期)2015-12-15
