
同步仿生机械臂设计*
2018-07-11 00:25陈亮宏孙旭杰卢会会姚小雪
机械研究与应用 2018年3期
杨 涛,陈亮宏,孙旭杰,卢会会,姚小雪
(南京工程学院,江苏 南京 211167 )
0 引 言
迄今为止,在机械臂的控制领域中,其操纵方式单一:一类为按键控制;另一类机械臂的运动则需要多个控制杆来控制,其设计繁琐,不易操作,一定程度上限制机械臂的推广和使用。国内仿生机械臂的水平和国外的仿生机械臂的水平相差较大。现如今,国外已经初步实现用脑电波和手臂神经微弱的电信号控制机械臂,但是技术还不是很成熟。同步仿生机械臂因其具有控制灵活和操纵简单的特点,兼有人行为意识和机械手的作业效能,已经成为当今世界科研领域及工业领域的热门话题和研究方向。因此在军事、医疗、卫生、太空、工业和海洋等领域有着广泛的应用前景。这次的研究采用多传感器信号获取,可以更精度地获取运动信息,将同步仿生机械臂的研究推向了新高度,可为今后的仿人机械臂、多机械臂和主从机械臂等同步控制的研究提供一定的技术和理论支持。
1 机械结构设计和有限元分析
1.1 同步仿生机械臂的机械结构设计
同步仿生机械臂,共有六个自由度,包括通过七个支架依次连接的六个旋转关节,其中第一旋转关节和第二旋转关节构成肩部的两个自由度,第三旋转关节构成大臂的一个自由度,第四旋转关节构成肘部的一个自由度,第五旋转关节构成小臂的一个自由度,第六旋转关节构成腕部的一个自由度。
所述六个旋转关节的结构相同,均包括驱动机构和法兰盘,驱动机构包括主要由直流电机、齿轮减速器和反馈控制器构成的闭环控制系统,齿轮减速器箱体和法兰盘分别与两个支架固定连接;直流电机接收反馈控制器提供的控制信号,产生的转矩通过齿轮减速器调整转速,最后输出给法兰盘,带动两个支架相对转动,旋转轴线为法兰盘的中轴线。
除位于端部的两个支架外,其余支架均为L型,L型支架的一个垂直面连接一个旋转关节中的齿轮减速器箱体,L型支架的另一个垂直面连接另一个旋转关节中的法兰盘。
肩部的两个自由度实现该机械臂通过肩部的旋转和上下运动,大臂的一个自由度实现大臂的翻转运动,肘部的一个自由度实现机械臂的屈伸运动,小臂的一个自由度实现小臂的翻转运动,腕部的一个自由度实现腕关节的旋转运动[1];肩部、大臂、肘关节、小臂和腕关节旋转运动的组合构成了机械臂的整体运动。其中第i旋转轴线对应第i旋转关节,彼此相邻的两条旋转轴线互相垂直,其中第一旋转轴线、第二旋转轴线和第三旋转轴线三条旋转轴线共点,第三旋转轴线、第四旋转轴线和第五旋转轴线三条旋转轴线共点。
如图1所示,将连接第一旋转关节的端部支架作为背部连接支架7,连接第六旋转关节的端部支架13称为机械手,其余第i支架对应第i旋转关节,第一支架8、第三支架10和第五支架12的结构尺寸相同,第二支架9和第四支架11的结构尺寸相同。
所述第一支架、第三支架和第五支架的短垂直面外侧均安装有一个辅助支撑板,通过辅助支撑板固定法兰盘,此时,法兰盘的中轴线可以设计在对应支架的外侧,以减小整个机械臂的结构尺寸。
所述肩部两个自由度的输出对扭矩要求较高,其余四个自由度的输出对扭矩要求一般。
该机械臂的反馈控制系统采用编码器设计[2]。图1展示的是机械臂运动学随机的一种运动状态,并不唯一。

图1 机械臂运动学模型1.第一旋转关节 2.第二旋转关节 3.第三旋转关节 4.第四旋转关节 5.第五旋转关节 6.第六旋转关节 7.背部连接支架 8.第一支架 9.第二支架 10.第三支架 11.第四支架 12.第五支架 13.端部支架
1.2 同步仿生机械臂的有限元分析
校核应力和变形:在完全伸展的状态下,施加末端竖直方向50 N的力,Solidworks有限元分析:如图2所示,当给机械臂施加约束和载荷时,其屈服力数据变化合理,在安全范围内,机械臂在完全伸展状态下,末端能够承受竖直方向50 N的力,机械臂的强度符合设计要求求。如图3所示,当对单只机械臂的末端竖直方向施加50 N的力时,从图的颜色变化可以看出,背部连接支架、第一支架和第二支架三处抗拉强度变化最快,但其抗拉强度小于屈服强度,不会断裂,符合设计要求。
如图4所示,在机械臂受力后,第二支架应力变化最快,第三支架次之,但其抗拉强度都在安全范围内,大臂回转关节和肘关节的设计符合要求。
如图5所示,在机械臂受力后,小臂回转关节和腕关节应力变化慢,抗拉强度在安全范围内,小臂回转关节和腕关节符合设计要求。

图2 约束和载荷施加示意图

图3 单臂整体应力云图 图4 大臂回转关节和肘关节应力云图

图5 小臂回转关节和腕关节应力云图
2 环臂采集系统的设计
2.1 手臂运动信息的采集
选用精密导电塑料电位器。
优势:无极分辨率。
劣势:对供电电压过于敏感。一般稳压源难以满足要求精度。
2.2 可穿戴传感支架的机械结构设计
可穿戴传感支架的机械结构:六个电位器两两组合,且组合方式一样,相互组合的两个电位器轴线互相垂直。第一电位器和背部支架相连,第二电位器和第一方管相连,第三电位器和第二方管相连,第四电位器和第三方管相连,第五电位器和第四方管相连,第六电位器和第五方管相连。其中第一电位器和背部支架的连接方式、第三电位器和第二方管的连接方式和第五电位器和第四方管的连接方式均相同。第二电位器和第一方管的连接方式、第四电位器和第三方管的连接方式和第六电位器和第五方管的连接方式均相同。其中背部支架、第一方管和第三方管的边长相同,长度不一。第二方管、第四方管和第五方管的边长相同,长度不一。第一和第三方管上均固定有固定装置,以便六自由度机械臂传感装置准确采集人体手臂运动信息。
第一方管和第二方管相连,第三方管和第四方管相连,且连接方式嵌套式相连并且能自由伸缩。可穿戴传感支架的机械结构如图6所示。第二电位器和第一方管连接方式如图7所示。第三电位器和第二方管连接方式如图8所示。
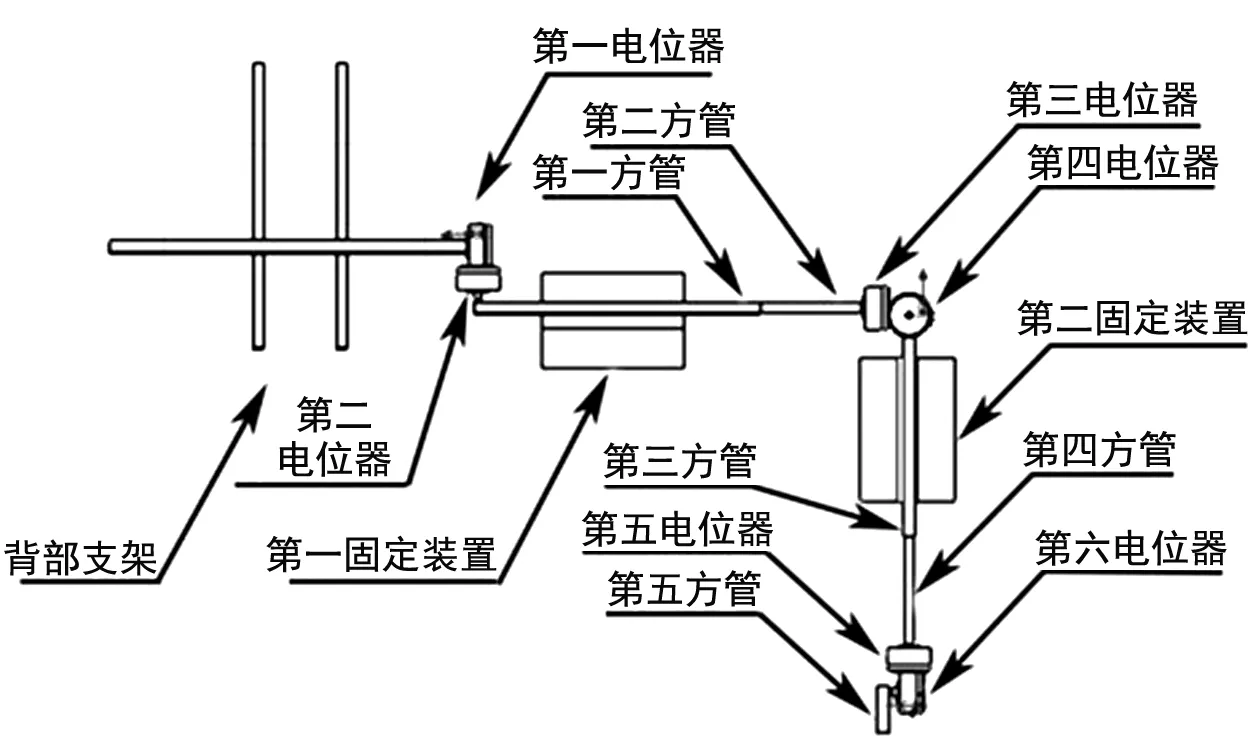
图6 可穿戴传感支架的机械结构

图7 第二电位器和第一方管的连接方式

图8 第三电位器和第二方管的连接方式
2.3 信号的无线传输
无线数传模块的选型:通过 HC-05蓝牙模块实现传感支架端与Android手机端通信,其有效传输范围:空旷地带大于10 m。通过采用NRF24l01无线[3]
2.4 G通信模块实现传感支架端与机械臂终端的通信。其发射端带增益天线,有效传输范围:空旷地带大于2 500 m。
2.4 信号的处理
(1) MCU的选型
意法半导体(ST)公司的STM32F103RC最小系统板。
(2) 输入信号的滤波
输入信号程序PI滤波。
PID算法
(4) PWM信号的输出
STM32F103的定时器最大可以同时产生30路PWM信号的 输出[4]。
3 同步仿生机械臂的运动
为了使该机械臂运行的更平稳,精度更高,在机械臂的每个舵机附近安装一个角度传感装置和编码器,由角度传感器检测角度变化,然后再由编码器调节舵机的转速,最终实现闭环控制。经调试,机械臂能够正常运转,且运动精度有了一定的提高。
4 结 语
重点介绍了一种同步仿生机械臂的机械结构和环臂采集系统的设计,并用Solidworks对所设计的机械结构进行有限元分析。测试应用表明:该机械臂能够实现同步仿生。该同步仿生机械臂的研究采用高精度传感器,更精度地获取运动信息;新颖的机械结构设计,将同步仿生机械臂的研究推向了新高度。为今后的多自由度同步仿生机械臂等领域的进一步研究提供一定的研究方向和理论支持。
猜你喜欢
爆破(2022年2期)2022-06-21
西安科技大学学报(2022年1期)2022-03-14
环境技术(2021年4期)2021-09-11
汽车实用技术(2021年16期)2021-09-09
中国特种设备安全(2018年5期)2018-06-13
汽车工程(2017年11期)2017-12-18
宇航材料工艺(2017年5期)2017-11-02
载人航天(2016年4期)2016-12-01
综合智慧能源(2014年1期)2014-09-10
中国工程机械学报(2014年3期)2014-05-25
