
一种跨垄式草莓采摘车的设计*
2018-07-11 00:25李冲冲马晓录郭永刚宣德坤闫志杰王勤东熊彦召
机械研究与应用 2018年3期
李冲冲,马晓录,郭永刚,宣德坤,闫志杰,王勤东,熊彦召
(河南工业大学 机电工程学院,河南 郑州 450000)
0 引 言
科技的发展和进步对我国农业的进步起到了促进作用。我国是人口大国,农村人口比重较大,但常年在外务工导致农村劳动力严重缺失,欧美等发达国家人口较少,因此机械化程度较高。草莓的采摘在整个草莓生长周期占用很大一部分时间,因此,提高农业机械化水平也是当代农村农业种植需要解决的一个重中之重[1]。草莓适宜生长在湿润的环境,质地柔软,多汁,采摘过程中非常容易受到损伤。在我国现阶段,草莓大多为垄作式大棚栽培,地膜附垄栽培,成熟后草莓果实大都分布在垄坡上。由于草莓的外形独特,株与株之间的间隙不等,且草莓的根茎盘绕交错,果实分布高低不均、单果成熟期不一致需进行选择性采摘,触碰力度控制要求高水果易碰伤等问题,造成了目前草莓的采摘方式还主要为人工采摘。人需要蹲下,或者半弯腰进行采摘,工作量非常大,而且效率低下。国内也有开发草莓采摘装置,但大都针对高架草莓种植方式,地垄采摘还是空白。
1 采摘机器人硬件部分的设计
采摘机器人主要由末端执行器,机器视觉系统、存储部分、行走部分,传送部分、数据采集卡等组成。直角坐标运动机构包括X、Y、Z三个方向运动的直线导轨,固定在可调节高度,宽度的车体上;采摘头包括转臂、吸盘、割刀、刀架阻尼杆,通过气泵产生负压吸取草莓,采摘头集成在直角坐标运动机构上;传送带安装在采摘头旁边,随采摘头横向移动,吸盘采摘的果实直接放置于传送带上,随带向上运动,最终落入收集框中。
1.1 末端执行器
末端执行器包括CCD摄像头、机械手、吸盘、割刀、传感器、收集装置等。机械手部分是水果采摘机器人设计与采摘最关键的部分,设计和计算过程中的参数一定要合理,来保证草莓的采摘顺利完成[2-3]。机器人在垄与垄之间直线运动,使其能够在通道的两侧进行草莓的吸取[4]。旋转制动器安装在悬挂式布置中,以便在末端执行器下方留出空间,并在末端执行器将水果放入托盘时避免托盘与末端执行器之间发生碰撞。
根据地垄的具体参数调节锁紧螺栓改变小车整体高度,防止车身顶部蹭伤垄坡上的草莓;调节梁架改变梁架的宽度,使左右轮能卡入垄两边的垄沟中;将草莓采摘车推入地垄,横跨在垄坡上,使车行进方向与地垄长度方向一致,调节X滑轨上的锁定螺母,让传送带下表面与垄坡坡面平行,并保持一定距离,为采摘吸盘留下作业空间,如图1(a)所示。
拨动销锁定后边两个万向轮,确保车身直线行进[5];启动电池开关,摄像头开始工作,识别草莓,确定成熟度并进行定位,控制系统控制X步进电机带动丝杠转动,Y滑轨和传送带横向运动;Y步进电机通过丝杆驱动滑块纵向运动,吸盘精确移动到成熟草莓的上方[6];直流电机开始工作,带动齿条向下移动,转臂安装在齿条下端,压在割刀上带动其一并向下运动,如图1(b)所示。
吸盘触碰到草莓果实后,激发安装在其上的触片,气泵接头通过软管连接的气泵开始工作,吸盘产生负压,延迟一段时间,直流电机反转,同时割刀电机开始工作,带动割刀的刀片往复运动;吸盘将带着草莓向上运动;与割刀相连的刀架阻尼杆没有物体带动而保持静止,吸盘从割刀下方运动到上方,草莓向上带着茎也向上运动,最终卡入割刀被切断[7];齿条继续上移,转臂碰到挡块上的挡块触片后,割刀电机停止,挡块连接刀架阻尼杆,由转臂带着向上运动,当转臂顶住滑块下底面后,齿条继续向上,但转臂被顶住无法向上运动,则与齿条相接的转柱沿螺线滑动上移,压在转柱上的弹簧被压缩,如图1(c)所示,但齿条无转动自由度,则转臂以齿条为转轴带着草莓转动,转到极限位置时,草莓在传送带上方,同时转臂转动极限限位开关开启,气泵断电草莓落在传送带上,由挡板带动向上运动,最后落入上方的收集筐中;直流电机正转,齿条向下运动,由于弹簧的回复,转柱沿螺线向下,转臂转回原位,开始下一个草莓的采摘[8-10]。
当将这一范围内的成熟草莓采摘完毕后,车身前方的两个驱动轮在驱动轮步进电机的带动下,向前行驶一段距离,继续循环采摘过程;当一段地垄上的成熟草莓全部采摘完毕后,需人工推动手柄将采摘车移动到其他地垄,进行草莓采摘。
1.2 机器视觉系统
机器视觉系统包括CCD摄像机、传感器、图像采集卡、计算机。首先对目标在不同的条件下的几何特征、所处环境、所在位置等信息采集,然后对采集到的图片进行分割处理,后由主控制器获取相关数据后对采摘的运动轨迹进行规划,控制系统接收到信息后开始执行命令,进行采摘。
1.3 存储部分
存储部分由托盘、堆垛机和传送带组成。托盘置于机器人下方,采摘好的的草莓通过机械手放置于传送带上,后传送到托盘内。将空托盘从处理空托盘的堆垛机运送到末端执行器下的位置。当托盘装满时,它被送回到一个处理装满托盘的堆垛机,并传送下一个空的托盘。
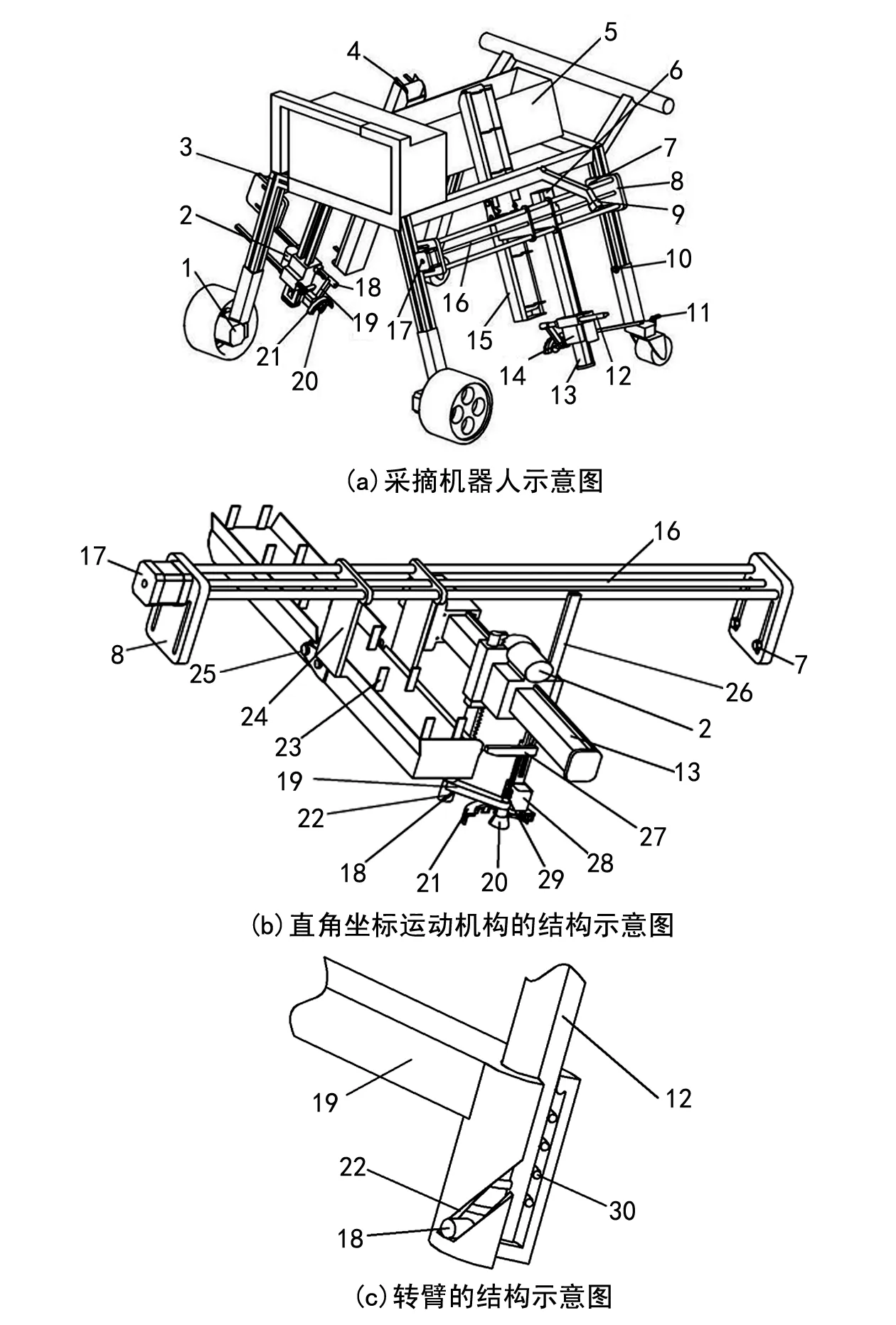
图1 采摘机器人1.驱动轮步进电机 2.直流电机 3.梁架 4.护板 5.收集筐 6.Y步进电机 7.锁定螺母 8.X滑轨 9.摄像头 10.锁紧螺栓 11.为销 12.齿条 13.Y滑轨 14.滑块 15.传送带 16.丝杠 17.X步进电机 18.转柱 19.转臂 20.吸盘 21.割刀 22.螺线 23.挡板 24.Y滑轨支架 25.调节螺母 26.刀架阻尼杆 27.挡块 28.割刀电机 29.气泵接头 30.弹簧
2 图像的采集与处理
2.1 图像采集
采集的图像是在水果成熟期拍摄的,所有照片都是在自然光照条件下拍摄的。获取多组草莓的图像,每幅图像的背景是变化的,包括简单和困难的背景。
2.2 水果物体提取中的特征选择
颜色通常由红(R),绿(G)和蓝(B)三原色组成。从三原色可以使用线性或非线性变换计算不同种类的色彩空间。几种色彩空间,用于彩色图像分割,但它们都不能超越其他彩色图像。选择OHTA色彩空间处理复杂农业背景下的水果物体提取。OHTA色彩空间是基于八种不同颜色图像实验总结的一组正交色彩特征集合。它不仅可以克服用于非线性色彩空间与RGB色彩空间之间转换的色彩奇异性问题,而且具有简单的计算[11]。
一般而言,图像分割被定义为将图像划分为具有相同特征的区域并提取感兴趣区域的技术和过程。特征可以用灰色,彩色或纹理等表示,目标可以是单个区域或多个区域,这与实际应用有关。常用的图像分割算法有灰度直方图分割算法,聚类分割算法,基于随机模型和区域分割的算法。在这项研究中,选择了一种基于Otsu的改进的自适应阈值分割算法,以实现其自动化和效率[12]。聚类分割算法和基于随机模型的算法都基于复杂的数学公式,但该算法只需要在Otsu上进行简单的计算,不需要复杂的数学计算,时间复杂度是线性的,有利于实时性图像处理中的机器人控制程序。
3 结 论
设计了一种在复杂农业背景下采摘水果的智能水果采摘机器人。采取图像分割的方法,使采摘机器人能够快速,准确地进入物体,从而有效地完成采摘果实的任务。开发水果采摘机器人可以有效减少果农的劳动力,有利于推广果品生产区,从而获得更多的经济效益。因此,迫切需要寻找简单而准确的方法来提取机器人系统的水果物体。
水果机器人使用基于视觉的模块自主执行其收获任务,用以检测和定位,并且控制系统调节操纵器和末端执行器以接近和摘取。未来的研究需要关注以下三个方面的实用性和机器人的商业化:①优化现有软件程序和算法以减少计算量。同时,提高被阻塞或摆动水果采摘的速度和准确性,从而增加机器人的实用性;②考虑到工作环境的复杂性和未知性,进一步研究应重点关注实时避障,提高采摘成功率和收获效率; ③改善机器人的机械结构以增强配置。
猜你喜欢
机械设计与制造(2022年11期)2022-11-21
中学生数理化·高一版(2021年1期)2021-03-19
——“模型类”相关试题选登
教学考试(高考物理)(2020年4期)2020-11-16
水运工程(2020年2期)2020-02-26
物流技术与应用(2019年6期)2019-07-16
中学教学参考·理科版(2016年11期)2017-06-08
重型机械(2016年1期)2016-03-01
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
