
基于灰色预测模糊PID控制的列车ATO系统优化
2018-07-28 01:26马晓娜朱爱红
铁道标准设计 2018年8期
马晓娜,朱爱红,卢 稳
(兰州交通大学自动化与电气工程学院,兰州 730070)
ATO(Automatic Train Operation,列车自动驾驶)系统作为ATC(Automatic Train Control,列车自动控制)系统的重要组成部分,可以实现降低列车驾驶员劳动强度、增大列车运营弹性、提高列车运行密度的目标。针对列车的自动驾驶运行,其本质是控制器控制列车的牵引力与制动力系统,追随已经生成的列车运行曲线运行的过程。因此,需要ATO控制器具有良好的追随效果,对ATO控制器的研究具有重要的现实意义。
ATO系统自60年代开始就已经成为了研究热点,国内外对ATO控制算法的研究经历了“经典控制-参数自适应控制-智能控制-集成智能控制”的过程[1-3]。其中,1985年日本日立公司的学者Yasunobu S针对使用模糊控制器控制精度低的问题,提出了在ATO系统中使用模糊预测控制算法的方案[4]。1996年张建华、贾利民等通过分析传统PID控制在列车自动驾驶系统应用中的缺陷,提出了基于NFPC(Novel Fuzzy Predictive Control,新型模糊预测控制)算法的ATO控制器[5]。2000年武研、施鸿宝针对地铁列车的自动驾驶控制过程,使用了基于模糊控制BP网络算法与遗传算法的集成智能控制方法[6]。2008年日本学者Shenghao Z、Yasunobu S将模糊理论及预测模糊理论引入到ATO系统中,通过使用模糊规则和多个模糊评价指标来设置模糊预测系统的控制规则[7]。2014年法国Aradi S、Bécsi T等学者,将预测控制算法引入了列车自动驾驶系统设计中[8]。2015年陈晓强利用物元模型(可拓学)方法能够很好地解决互不相容问题的优点,设计了基于物元模型的列车自动驾驶控制器,并验证了其在提高列车运行过程性能指标中的有效性[9]等。
综上所述,国内外针对列车自动驾驶系统的研究方法较多,研究的角度也较为广泛,为了更好地提高列车自动驾驶系统的综合性能,需要对其相关技术进行更加深入的研究,以使得理论实际可以更好地转化为工程应用。因此,本文将对集成的灰色预测模糊PID算法在ATO系统中的应用进行研究。
1 ATO系统基本理论
针对装备了自动驾驶系统的列车,其自动驾驶系统的典型控制过程通常包括两个方面:首先,依据线路的情况及ATS(Automatic Train Supervision,列车自动监督子系统)或者CTC(Centralized Traffic Control,调度集中子系统)的信号生成理想目标曲线。其次,ATO控制器将实时计算出的控制量转换为控制指令,发送给牵引或制动系统,使列车依据给定的理想目标曲线运行。典型的ATO系统控制过程如图1所示。本文主要针对ATO系统的控制器进行设计研究。
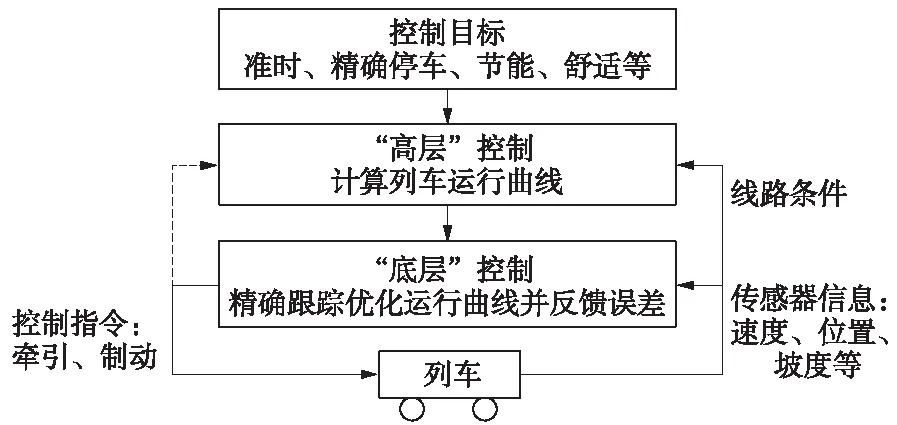
图1 ATO系统典型控制原理
2 灰色预测模糊PID控制系统设计
2.1 灰色预测原理及设计
灰色系统是介于白色系统(全开放性)与黑色系统(全封闭性)之间的、信息不完全的系统。对于精确数学模型难以建立的系统,都属于灰色系统的范畴。灰色预测以邓聚龙先生提出的灰色模型GM(n,h)为基础,其中n表示阶数、h表示变量个数。常见的灰色模型主要有GM(1,1)、GM(1,N)、GM(2,1)等形式,主要选择GM(1,1)模型进行控制器的设计。
在灰色系统理论中,灰色模型的建立基于生成数据,因此需要对原始数据进行变换,得到生成数据。使用GM(1,1)模型对列车ATO系统k+M时刻的输出进行预测,生成数据通过预测模型的作用,得到预测值数列,对预测值数列进行逆运算即可得到列车ATO系统的预测结果。依据灰色系统理论,得到列车ATO系统的GM(1,1)模型的建立过程如下所示。
针对列车自动驾驶系统,测得的输入、输出时间序列如式(1)和式(2)所示。
(1)输入序列
u(0)(1),u(0)(2),…,u(0)(n),n≥4
(1)
(2)输出序列
y(0)(1),y(0)(2),…,y(0)(n),n≥4
(2)
式中,u(0)(i)为系统的输入时间序列;y(0)(i)为系统的输出时间序列。
灰色建模的实质是对生成的有规律的数据序列进行指数拟合,而由原始的序列式(1)和式(2)得到的数据是没有规律的,因此需要对这些数据进行累加,得到有规律数据序列。其累加数据序列如式(3)与(4)所示。
(3)

(4)
利用生成的累加数据列式(3)和式(4),可以建立GM(1,1)模型的灰微分方程,如式(5)所示。其中
i的取值为2,3,…,n。
y(0)(i)+az(1)(i)=u
(5)
由方程式(5)得到GM(1,1)模型的一阶微分方程如式(6)所示。
(6)
式中,a为发展系数;u为灰色作用量。a与u值的大小可以采用最小二乘计算方法进行估计,如式(7)所示。其中,B矩阵的形式如式(8),Y向量如式(9)所示。
(7)

(8)
Y=[y(0)(2),y(0)(3),…,y(0)(n)]T
(9)
辨识得到a与u的值后,根据一阶微分方程式(6),可以得到y(1)(t)在k时刻的解如式(10)所示。
(10)
若要对k+M时刻的值进行预测,需要经过对数据的累加与还原过程,该过程主要通过式(10)实现。最终得到的列车ATO系统的原始数据对k+M时刻的预测函数
(11)
在进行灰色预测控制时,建模的维数n及预测步数M将对准确地预测系统行为的发展变化产生影响。为了提高控制过程的实时性与准确性,实现超前控制,需要选取恰当的n值与M值。通常,预测步数的选取与系统的滞后性和惯性有关,滞后性或惯性越大,则预测步数越大。经分析,选取建模维数n=3,预测步数M=5。
2.2 模糊PID原理及设计
PID控制,是历史最为悠久、应用最广泛、适应性最强的控制方法,其核心是对比例系数KP、积分系数KI以及微分系数KD的整定。一个完整的PID控制系统通常包括控制器及控制对象,PID控制过程中涉及的相关参数如下:
(1)系统设定的目标值为r(t);
(2)系统的实际输出值为y(t);
(3)系统设定目标值与实际输出值的偏差为e(t)。
在PID的控制过程中,控制器对受控对象的控制,往往是通过e(t)的线性组合控制量来实现的。控制过程中涉及到的核心方程分别如下所示。
(1)核心控制方程为
e(t)=r(t)-y(t)
(2)控制器时域输入输出关系方程为
(3)传递函数方程为
其中,u(t)为系统的输出;e(t)为系统的输入与输出的偏差;G(s)为传递函数。
在本文的结合过程中,使用模糊规则修正PID的参数,其输入为误差e及误差的变化率ec,输出为PID系数KP、KI及KD的调节参数ΔKp、ΔKi、ΔKd。最终得到的PID参数为KP+ΔKp,KI+ΔKi,KD+ΔKd。
模糊理论用于控制,始于1965年扎德提出的模糊算法。与经典PID是线性控制不同,模糊控制是一种被精确定义的特殊非线性控制。它在解决多输入、多输出、时变、非线性问题上效果尤为明显。因此,作为一种理论上精确的控制算法,模糊控制也得到了广泛的应用。
本文主要通过总结前人的经验,使用如表1~表3所示的控制规则,对PID的参数进行自适应的调整。其中,NB、NM、NS、ZO、PS、PM、PB分别代表语言变量负大、负中、负小、零、正大、正中、正小。

表1 ΔKp的模糊规则

表2 ΔKi的模糊规则

表3 ΔKd的模糊规则
2.3 灰色预测模糊PID控制系统
基于灰色预测、模糊控制与经典PID控制3种核心算法,构造了基于灰色预测模糊PID的控制算法。得到车载ATO系统的灰色预测模糊PID控制原理框图,如图2所示。

图2 自动驾驶灰色预测模糊PID控制框图
为了实现列车ATO系统的控制过程,在MATLAB/Simulink中,搭建了基于灰色预测模糊PID自动驾驶控制器的列车自动驾驶运行过程的仿真模型,如图3所示。其中,模糊PID控制模块为封装模块,其内部结构如图4所示。
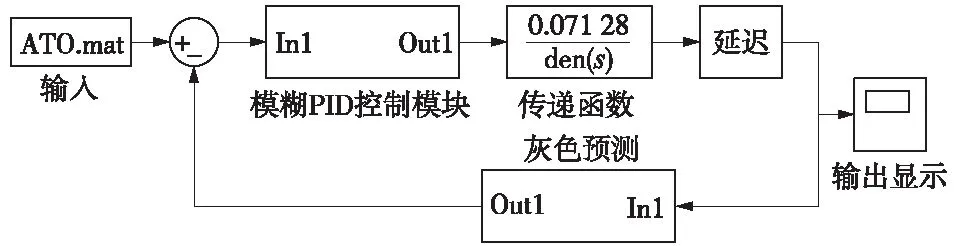
图3 灰色预测模糊PID控制系统仿真模型

图4 模糊PID控制子模块
3 仿真验证分析
为了验证设计的控制器具有较好的控制性能,选取武广客运专线中武汉站至咸宁北路长84.953 km的区间作为仿真线路,以CRH3型动车组作为仿真车型。其中仿真线路的参数如表4所示。
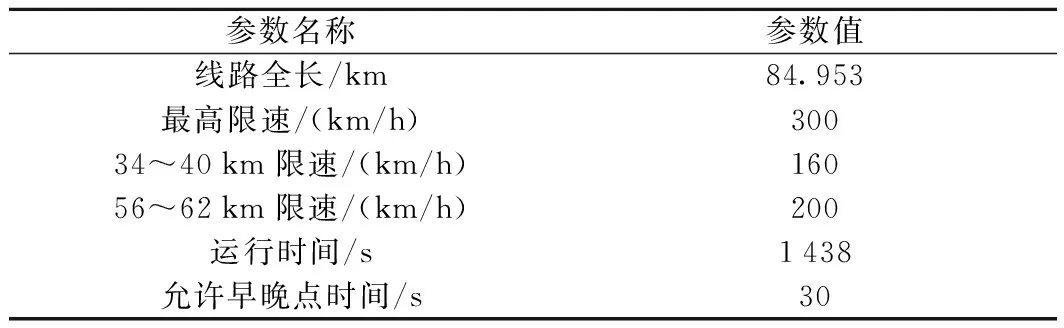
表4 仿真线路相关参数
以列车的牵引制动特性为基础,考虑各性能指标生成一条优化后的列车运行曲线,以该曲线为输入曲线,验证控制器的控制性能。其中CRH3型动车组的参数特性参考文献[16],主要包括列车总质量536 t,最高运行速度350 km/h,列车的牵引与制动特性,基本运行阻力w0=0.79+0.006 4v+0.000 115v2等。优化后的列车运行曲线如图5所示。

图5 列车运行优化曲线
针对图3所示的灰色预测模糊PID控制系统,其传递函数为列车运动模型。为了确定该模型,需要对列车的参数模型进行辨识,选择文献[17]中的模型数据,其传递函数的模型如下式所示。通常,对于不同型号的列车,调整下式中的模型参数即可满足需求。
以优化后的列车运行速度-距离曲线作为列车ATO控制系统的输入,将经控制器作用后的输出曲线与输入曲线进行对比,如图6所示。从图6可以看出,输出曲线可以很好地追随输入曲线。

图6 列车运行对比曲线
为了更明确地反应控制器的控制效果,对输出曲线与输入曲线进行比较分析,得到两者间的追随误差变化如图7所示,加速度的变化如图8所示。从图7可以看出,经控制器作用后输出的曲线和输入曲线间的误差小,可以取得很好的追随效果。从图8可以看出,加速度的变化在(-1,1)之间,满足舒适度的要求。

图7 跟随误差变化曲线
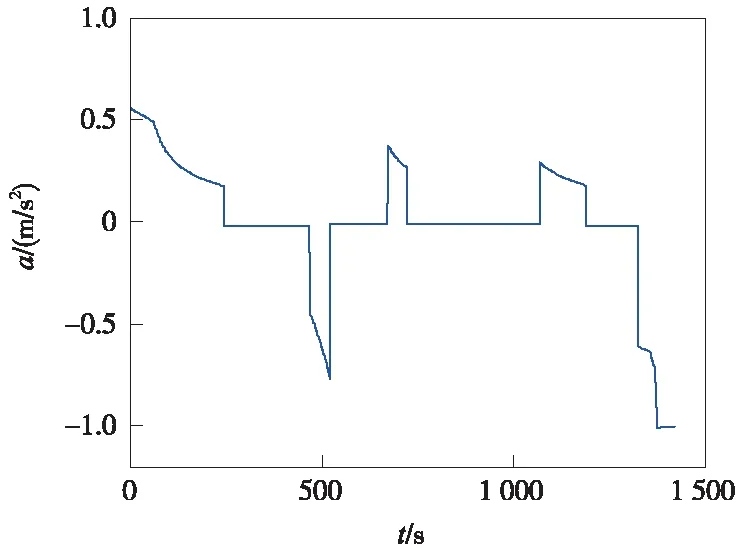
图8 加速度变化曲线
4 结论
针对列车ATO系统的多目标、非线性特征,设计了基于灰色预测模糊PID控制的列车ATO核心控制算法。对该算法的具体设计过程进行了分析,选取了相关车型与线路进行了仿真验证。通过对列车运行过程的输入输出距离-速度对比曲线、时间-速度误差变化曲线及输出的加速度变化曲线的分析,得出设计的ATO控制器可以很好地追随优化后的列车运行曲线,且控制的误差小,舒适性好,可以取得良好的列车ATO控制效果。
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
铁道通信信号(2020年1期)2020-09-21
小学生学习指导(低年级)(2020年3期)2020-06-02
小学生学习指导(低年级)(2019年6期)2019-07-22
铁道通信信号(2019年12期)2019-05-21
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
新民周刊(2016年20期)2016-05-25
为了孩子(3~7岁)(2016年8期)2016-05-14
