自动导航插秧机作业性能试验研究
2018-08-01 07:53赵祚喜靳俊栋可欣荣黎源鸿杨贻勇
江苏农业科学 2018年13期
赵祚喜, 靳俊栋, 可欣荣, 黎源鸿, 赖 琪, 杨贻勇
(华南农业大学南方农业机械与装备关键技术教育部重点实验室/华南农业大学工程学院,广东广州 510642)
农业机械自动导航即农业机械通过各项传感器感知周围环境获得自身的位置信息以及姿态信息,然后根据用户需要进行路径规划以及导航控制,自主完成各项作业任务。在精准农业技术的驱动下农业自动导航技术得到快速发展,并且广泛应用于耕作、播种、施肥、喷药、收获等农业生产过程中。农业机械自动导航这一技术已经实现商品化,广泛应用于世界各大农场[1-4]。
市面上的自动导航产品已广泛应用于我国各大农场。黑龙江垦区为大力发展现代化农业,加快提升商品粮基地建设,从2002年开始,黑龙江农垦总局陆续从国外引进了美国约翰迪尔(John Deere)公司的AutoTrac自动导航系统、天宝(Trimble)导航公司的Autopilot自动导航系统以及加拿大Hemisphere公司的Outback S3自动导航系统[5]。这些导航产品不仅能优化机器效率、减轻操作员疲劳,而且大大延长了驾驶员的作业时间,提高了作业量,创造了更大的经济效益。然而,这种导航产品只与旱地拖拉机配套使用,主要应用于起垄、播种等旱地作业,市场上没有一套专门应用于水田轻型拖拉机的导航产品。
近几年,国内学者也在插秧机上开发自动导航系统。张智刚等在SPU-68型插秧机上开发基于差分全球定位系统(differential global positioning system,简称DGPS)和电子罗盘的导航系统,该系统以速度为0.75 m/s进行直线路径跟踪时,平均误差为4 cm,最大误差为13 cm[6];胡炼等为了提高插秧机自动导航系统的可靠性,设计了一种基于控制器局域网络(controller area network,简称CAN)总线的分布式控制系统,田间试验直线跟踪误差不大于0.2 m[7];毛可骏等在插秧机上研究机器视觉导航,结果表明该方法具有一定的可行性[8];伟利国等以XDNZ630型水稻插秧机为试验平台,采用RTKGPS技术和PID[比例(proportion)积分(integral)微分(derivative)]控制算法,实现了自动对行导航及地头转向控制,在车速不大于0.6 m/s时,对行跟踪误差小于10 cm,作业精度较低[9];谢昌盛以ZG630A高速插秧机为研究平台开发基于双激光源定位的高速插秧机无人驾驶扣工资系统,结果表明,该系统的控制精度在5 cm以内[10]。
本研究基于一套旱地拖拉机导航系统提出一种改装方法,将其安装至水田拖拉机上进行试验。分别在广东省与黑龙江省的农场设计插秧机田间试验,探究该导航系统在插秧机上的作业性能,验证该改装方法的可靠性,为后续水田拖拉机自动导航系统的开发与研究提供参考。
1 材料与方法
1.1 自动导航系统在插秧机上的安装
自动导航系统包括1个卫星信号接收器、显示器以及电控转向盘(图1)[11]。
自动导航系统无法直接在水田插秧机上安装使用,须经过改装之后才能装载至水田插秧机上。在此之前,已经成功地将自动导航系统安装在经过改装的全地形车上,该导航系统在全地形车上的工作性能稳定,在路况条件不错的情况下其跟踪导航的横向偏差接近2 cm,导航精度高[12-13]。根据插秧机的实际情况,将自动导航系统在全地形车上的安装方案加以修改,按照修改后的方案将自动导航系统装载至插秧机上,这种改装方法在不破坏水田插秧机原有结构的基础上进行导航系统的安装,安装方法简单而且可靠性高,其安装方案如图2所示。拆下插秧机原有的方向盘后,露出插秧机转向轴和转向柱。根据转向柱上转向轴的花键尺寸选择与之相匹配的花键套,将花键套加工成与自动导航转向盘相匹配的转向衬套,如图2中标号4所示,转向衬套是自动方向盘与转向轴之间的传动件,三者之间相互嵌套,方向盘转动时带动这一转向衬套从而转动插秧机转向轴实现转向。方向盘固定板按图2安装方式与方向盘相固定,2个“V”形摩擦块之间采用螺栓连接,拧紧螺栓使得摩擦块夹紧转向柱,之后再用螺栓使方向盘固定板与2块“V”形摩擦块相互固定。根据自动导航系统在插秧机上实际安装情况如图3所示。整套系统在插秧机上的安装情况如图4所示,GPS接收机固定在插秧机前端的横梁上。



1.2 人工驾驶与自动导航作业效果对比的试验方法
在广东省台山市与黑龙江省友谊县2种不同的土地环境下进行自动导航与人工驾驶插秧的对比试验,记录分析作业时的数据,探究自动导航系统在插秧机上的作业性能。

自动导航插秧机在工作之前,须要根据田块实际情况先设定1条基准线以及行距,在田梗的一边确定A点,到另一边确定B点,确定这2点之后系统便生成1条AB基准线,系统根据行距大小将AB基准线平移生成数条基准线,导航系统控制插秧机沿着这些基准线进行插秧作业。为了能够分析自动导航插秧机作业时的作业情况,利用数据记录仪采集自动导航作业时的作业轨迹以及A点和B点的坐标信息。计算自动导航作业轨迹相对于AB基准线的平均绝对横向偏差以及其标准差,用于评价导航系统的作业效果。
将GPS传感器安装在插秧机上记录人工驾驶作业时的轨迹。由于人工驾驶时没有自动导航系统设置AB基准线的步骤,无法计算人工驾驶作业轨迹相对于基准线的横向偏差。因此,处理人工驾驶的数据时,将其每一条直线轨迹采用线性拟合的方法拟合出一条直线,计算该作业轨迹相对于拟合线的平均绝对偏差及其标准差。将自动导航与人工驾驶的数据结果对比分析,从而对自动导航的作业效果做出客观评价。
1.3 数据处理
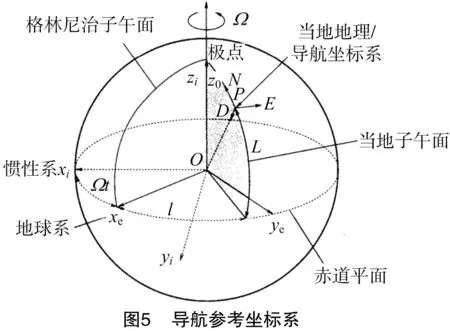
采集插秧机行走轨迹的经纬度数据,将经纬度坐标转换成基于大地坐标系(e系)下的坐标点,该坐标系是以地心作为原点的坐标系,xe轴沿格林尼治子午面和地球赤道平面的交线,ze轴沿地球极轴方向(图5)[14]。
经纬度坐标转换成大地坐标系下坐标点的转换公式如下:
x1=[RN(φ)+h]cos(φ)cos(λ);
y1=[RN(φ)+h]cos(φ)sin(λ);
z1=[RN(φ)(1-e2)+h]sin(φ)。
(1)
式中:φ表示转换成弧度制后的经度坐标;λ表示转换成弧度制后的纬度坐标;h表示海拔高度;RN(φ)表示WGS-84模型下地球的横向曲率半径。RN(φ)的计算公式如下:
(2)
式中:a表示WGS-84模型中地球的长半径,取值为 6 378 137.0 m;e表示WGS-84模型中地球的椭圆偏心率,取值为0.081 819 190 842 6。
通过以上公式完成经纬度坐标到大地坐标系的转换,再将大地坐标系下的坐标点转换成导航坐标系下的坐标点。导航坐标系是一种当地地理坐标系,如图5所示,原点位于导航坐标系统所处的位置P点,坐标轴指向北、东和当地垂线方向(向下)。其转换公式为:
(3)

(4)
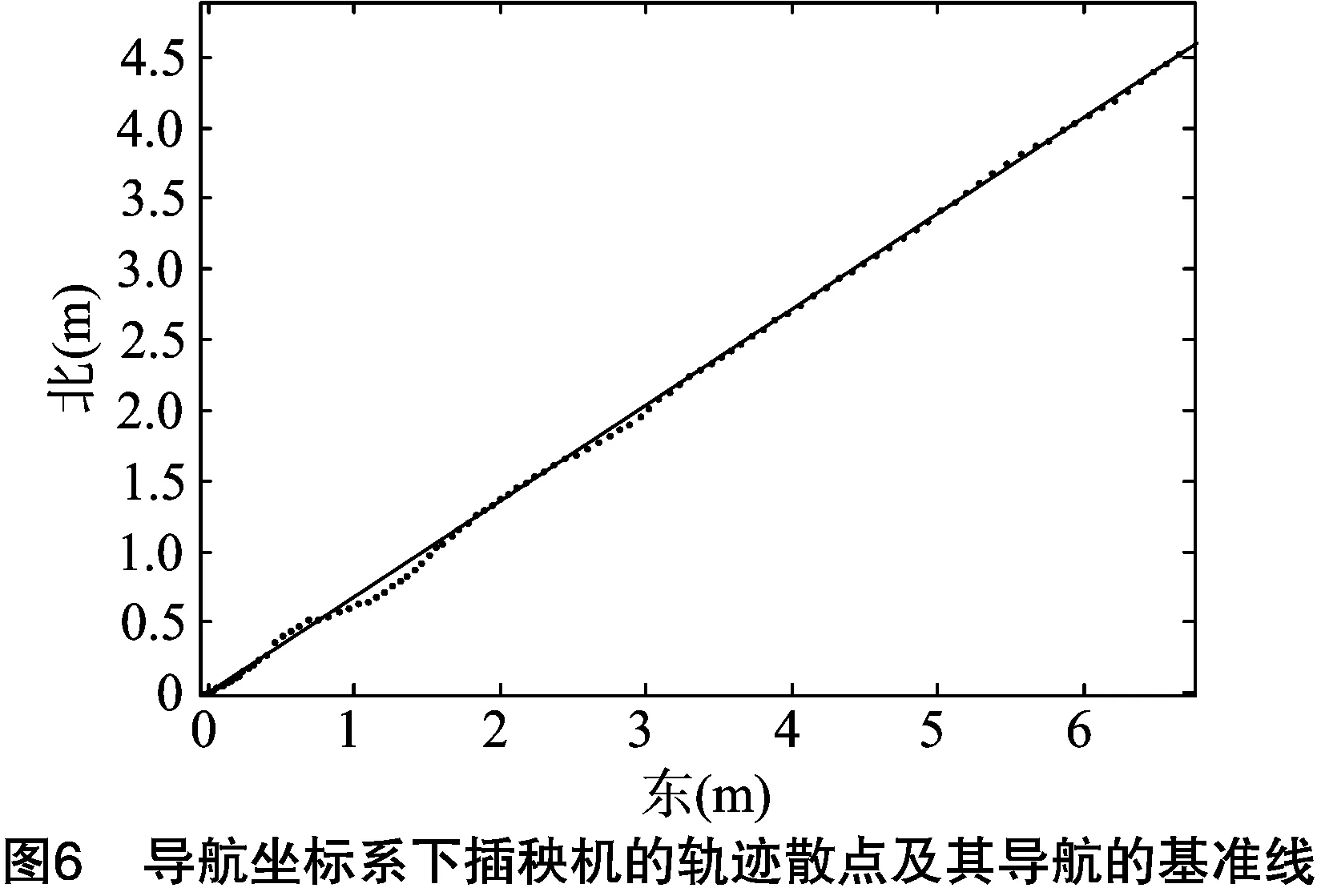
如图6所示,这是经过上述一系列转换后的自动导航插秧样机的作业轨迹散点图以及其导航的基准线。散点表示插秧机行驶过的位置,散点的坐标为(x2,y2),导航基准线为Ax+By+C=0,因此插秧机作业时与基准线的横向偏差为:
(5)
2 田间试验与数据处理
我国水田类型主要以广东省与黑龙江省为主,它们耕作环境存在差异,广东多为丘陵地貌,每一块水田面积小,而黑龙江地势平坦,每一块水田面积大,因此两地插秧机驾驶员的操作水平以及操作方式等均有所差异,只将自动导航与一个地区驾驶员的作业效果作比较并不能完全说明自动驾驶与人工驾驶之间的差异,为此须要在不同耕作环境下驾驶员的作业效果作比较。因此,在广东以及黑龙江两地的农场设计田间试验比较插秧机在人工驾驶条件下与自动驾驶条件下的作业效果。
如图7所示,广东省驾驶员驾驶插秧机插秧时的场景,试验地点为广东省台山市都斛镇,试验时间为2016年3月。图8为人工驾驶作业时GPS采集的作业轨迹经纬度坐标。


只保留人工驾驶插秧机作业行走轨迹中的直线轨迹部分,去掉其他无关轨迹,得到的每一行线段表示人工驾驶作业时直线行走的轨迹并按照上述数据处理方法进行处理,得到导航坐标系下人工驾驶作业时直线行走轨迹的散点图(图9)。在导航坐标系下计算每一条直线轨迹的横向偏差,用于分析人工驾驶的效果。由于没有1条基准线用于计算人工插秧时每一条作业轨迹的横向偏差,因此对其每一条直线轨迹进行线性拟合获得拟合直线,以该直线为基准计算该直线行轨迹的横向偏差。由于这次广东人工驾驶试验进行至最后3行直线轨迹时,须要对该地块进行补秧,试验中后3行轨迹没有按照直线插秧作业的要求进行,因此只分析前面8行直线轨迹的作业情况。对每一行直线轨迹的横向偏差进行统计分析,结果如表1所示。


表1 广东省人工驾驶试验作业轨迹横向偏差统计分析
由表1可知,人工驾驶作业时,其作业轨迹总的平均绝对值偏差为4.46 cm,平均标准差为2.69 cm。其中,第1行作业轨迹的横向偏差各项指标均为最小,其平均绝对值偏差为 2.37 cm,标准差为1.31 cm。在这次试验中,第1行直线轨迹的作业效果最好,之后每一行的作业效果均比第1行轨迹差,其他行的作业效果随着行数的增加整体呈下降趋势。
广东省人工驾驶试验完成之后,在人工驾驶试验时所使用的插秧机上装载自动导航系统,使用这台装有自动导航系统的插秧机进行插秧试验,统计每一行的横向偏差数据(表2)。在自动导航作业过程中,总的平均绝对横向偏差为 2.29 cm,标准差为1.63 cm。其中,最小平均绝对横向偏差为 1.09 cm,最大平均绝对横向偏差为3.26 cm。

表2 广东省自动导航试验作业轨迹横向偏差统计分析
在黑龙江省按照广东省田间试验的方法进行试验。图10为黑龙江驾驶员驾驶插秧机作业时的场景,试验地点为黑龙江省友谊县友谊农场,时间为2016年5月。黑龙江人工驾驶试验中每一行作业轨迹的横向偏差统计结果如表3所示。由表3可知,人工驾驶作业过程中总的平均绝对横向偏差为 4.50 cm,平均标准差为3.36 cm。其中,最小平均绝对横向偏差为2.17 cm,最大平均绝对横向偏差为7.08 cm。
黑龙江省人工驾驶试验完成之后,将自动导航系统装载至人工驾驶试验时所使用的插秧机上进行自动导航插秧试验。由表4可知,黑龙江省自动导航试验的作业过程中,总的平均绝对横向偏差为2.70 cm,平均标准差为1.90 cm。其中,最小平均绝对横向偏差为2.05 cm,最大平均绝对横向偏差为 3.52 cm。自动导航作业效果如图11所示。
3 数据对比与分析
将广东自动导航与人工驾驶作业试验的结果相比,其中自动导航控制下的插秧机的作业轨迹的平均绝对横向偏差为2.29 cm,而人工驾驶的作业轨迹的平均绝对横向偏差为4.46 cm,这说明自动导航的作业效果比人工驾驶好,插秧机在自动导航系统控制下能够更好地跟踪预定轨迹。人工驾驶作业时横向偏差的标准差为2.69 cm,而自动导航作业时横向偏差的标准差为1.63 cm,这说明自动导航比人工驾驶的作业效果稳定。其中,驾驶员在工作过程中,随着作业行数的递增,各项指标整体增大,作业效果随之变差,而自动导航作业时各项指标随着作业行数的增加相差不大。在黑龙江田间试验中,自动导航作业轨迹的平均绝对横向偏差为2.70 cm,平均标准差为1.90 cm,而人工驾驶的作业轨迹的平均绝对横向偏差为 4.50 cm,平均标准差为3.36 cm,自动导航作业时的各项指标均比人工驾驶作业时要低,自动导航系统的控制效果比人工驾驶好。同样地,在黑龙江省人工驾驶作业过程中,随着行数的递增,其各项指标整体增大,自动导航作业时的各项指标随着行数的增加依然相差不大。


表3 黑龙江省人工驾驶试验作业轨迹横向偏差统计分析

表4 黑龙江省自动导航试验作业轨迹横向偏差统计分析

综合两地的试验结果,自动导航插秧机直线作业时的作业效果及稳定性优于人工驾驶,且不会因作业场地的改变而改变。2位驾驶员驾驶插秧机的作业精度相近,作业轨迹的平均绝对横向偏差均在4.40 cm左右,但是两者的标准差相差比较大,广东省驾驶员的数据标准差较小,这是因为广东省驾驶员作业的地块比黑龙江省小,广东省驾驶员把控作业轨迹的直线度比较容易。虽然自动导航系统在拖拉机直线行走作业时能够减轻驾驶员的工作压力,但是每次换行作业时仍须驾驶员手动转弯换行,而且拖拉机的车速仍须驾驶员控制。因此,自动导航系统仍须要在原来的基础上增加地头转向的功能以及车速控制装置。
4 结论与展望
本研究提出一种改装方法将一套旱地拖拉机导航系统安装至水田拖拉机上进行试验。采用GPS记录驾驶员驾驶水田插秧机作业过程,在广东省以及黑龙江省对直线插秧作业进行试验研究,将其与自动导航的作业效果进行比较,分析作业轨迹与预定轨迹之间的平均绝对横向偏差和标准差,比较人工驾驶与自动导航的插秧效果。探究该导航系统在插秧机上的作业性能,验证该改装方法的可靠性。结果表明,本研究提出的这种改装方法简单而且可靠性高,该自动导航系统通过这一方法安装至水田拖拉机上不仅能够正常工作,而且不影响其导航性能。
在广东省以及黑龙江省的田间试验中,该自动导航系统能够有效地控制插秧机进行作业,其作业效果及稳定性优于人工驾驶,该导航系统控制下的插秧机的直线导航的平均绝对横向偏差为2.29~2.70 cm,横向偏差的标准差为 1.63~1.90 cm。
虽然装有自动导航系统的插秧机作业效果比人工驾驶好,但现有的农机导航产品只有直线导航功能,还须增加地头自动转向控制功能以及油门自控系统,这对减少人力成本以及实现农业精准化作业具有重要意义。
猜你喜欢
南方农机(2022年23期)2022-12-01
当代医药论丛(2021年3期)2021-03-17
数学大王·低年级(2017年9期)2017-09-18
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
湖南农业(2016年3期)2016-06-05
赤峰学院学报·自然科学版(2015年15期)2015-03-21
湖南农业(2013年12期)2013-04-07
医学理论与实践(2012年4期)2012-12-09