
遥控水田旋耕机控制系统开发
2018-08-02 06:19周彦春李红阳魏灿苗熊永森
时代农机 2018年5期
周彦春,李红阳,魏灿苗,熊永森
(1.金华市婺城区九峰职业学校,2.浙江四方集团公司,3.金华职业技术学院,浙江 金华 321000)
为实现水田作业机械的遥控操作,采用无线数据收发模块和数据采集处理模块,配合无线通讯协议,设计了一套基于DSPF2812控制芯片的水田作业机械无线遥控驾驶与耕作系统。通过野外作业实验表明,该系统遥控无障碍距离达到1000m,无线数据传输稳定,能满足水田作业机械的遥控要求;同时耕作系统通过闭环控制可以实现对耕地深度的控制,满足农艺要求。
旋耕机控制系统主要有电源系统、控制主板、无线遥控器、耕深检测模块、档位控制模块、油门控制模块、HST控制模块和耕具控制模块等。控制系统框图见图1。
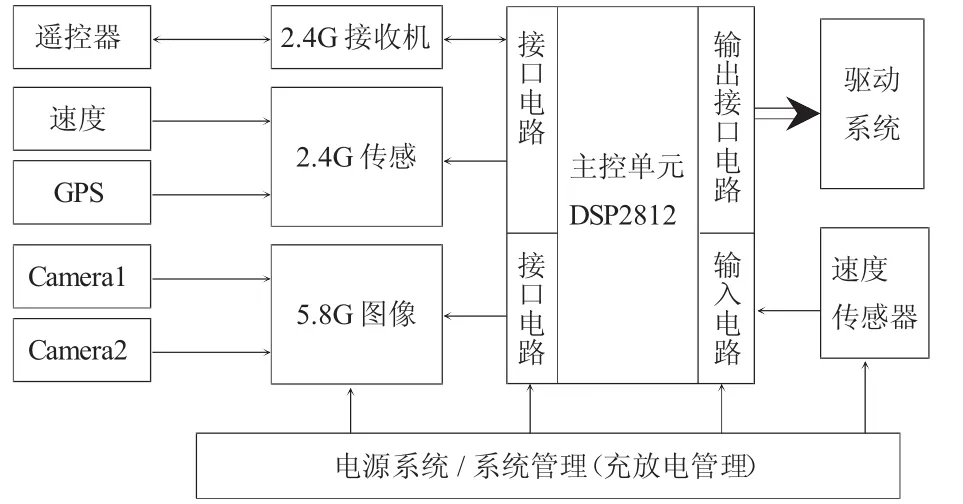
图1 系统框图
1 电源系统
考虑到耕机工作时来自工作环境的干扰(发动机转动产生的干扰,拖拉机启动电机的开启和关闭瞬间的电源波动)会通过电源串入到系统中,从而不影响系统的正常工作,必须对电源模块进行必要的抗干扰措施。在电源的输入级加入电源滤波器,滤除来自电源的干扰。采用多个DC-DC隔离电源,分别对主控CPU部分、信号接收和控制信息采集部分、执行机构的驱动部分进行供电。
2 控制主板
系统采用CPU核心板与母板直插的形式——DSP核心板插在母板上。如图2所示,信号输出和输出采用光耦隔离,可以避免外部电磁干扰串入到主控单元中而影响DSP的正常工作。
为了满足系统的控制要求,采用双CPU工作模式。分别用于耕作控制和拖拉机行走控制。行走控制部分的控制信号来源于无线遥控模块。通过DSP的捕获单元,读取遥控无线接收模块传出的PPM信号的脉宽。通过DSP调整,满足拖拉机的换挡、变换油门、转向、以及熄火等功能。对于耕作控制单元,通过耕作控制核心板来完成。此CPU主要负责耕具的提升和放下及耕深控制。耕具的提升与放下,通过DSP的捕获单元捕获无线遥控模块接收器的PPM信号的宽度,决定耕具的上升和下降。对于耕深的控制是通过基于485接口的数字编码器的回传耕具托板上扬角度来实现PID控制。其中编码器如图3所示。

图2 控制主板图

图3 编码器
3 无线遥控模块
无线遥控有两部分组成,手持遥控器见图4,本地信号接收模块见图5。

图4 遥控器

图5 信号接收模块
接收到遥控器上对应的各个开关的位置状态后,分别输出对应状态的PPM信号。这些PPM信号接入到主控制单元后,通过DSP的捕捉单元采集并通过计算得出对应的开关位置状态,从而可以实现遥控器的操作控制。
DSP主控制单元和手持显示控制模块之间的通信主要通过Zigbee模块进行,由5V隔离电源供电,Zigbee模块通过RS232与DSP控制单元进行通信,DSP可向手持显示模块发送状态、档位、油门、转速、温度、耕具位置等信息,将这些信息显示在液晶屏幕上,方便操作者实时了解耕机的具体情况和数据。接近开关有8个,主要包括5个档位位置,3个耕具位置以及压轮位置,电源为12V。当执行机构接近相应位置上的开关时,由DSP控制单元检测到相应开关状态,并执行对应的操作。
4 软件系统概述及其主要模块介绍
软件使用C语言在CCStudio3.3环境下编写并进行调试,程序主要包括2.4G无线通信模块、耕深检测模块、档位控制模块、油门控制模块、HST控制模块以及耕具控制模块,其中2.4G无线通信模块包括无线主控监视器和无线辅助遥控器。
无线主控监视器有启动和停止的开关按钮,用于启动和停止整个系统的运行,同时监视器的屏幕上能实时显示机组状态,档位,油门,转速,温度,耕具位置等信息。无线辅助遥控器通过遥控上的各个按钮开关调节档位、油门、HST、耕具位置等,使控制机组按操作者指令进行动作。软件组织构架图6。
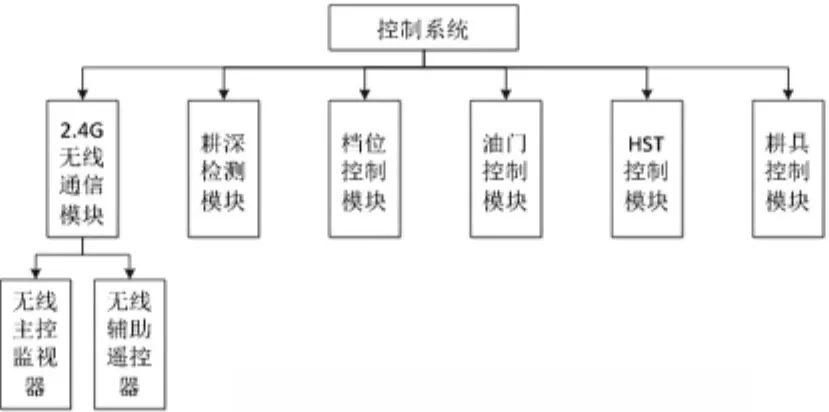
图6 软件组织构架图
4.1 主要模块软件流程介绍
系统总体软件流程框图如图7所示,开机启动后需检测机组各开关位置状态,确保机组处于安全状态下方可启动。

图7 系统总体软件流程
4.2 换挡子程序
耕机运动控制单元主要负责旋耕机的运动控制,主要包括换挡,HST,油门等操作控制耕机的前进和后退等。
换挡子程序的框图如下所示,在换挡之前需先将油门和HST归零,若操作人员按操作规则在换挡之前已将油门和HST归零则归零操作不执行,以防操作时没有将油门和HST归零,则系统自动先确定油门和HST处于零位再执行换挡的操作。换挡后,若档位对应的接近开关没有置位,则说明换挡不成功,这时先在一定范围内晃动HST位置以及档位位置直至换挡到位。若不是空挡则恢复当前油门和HST的位置,空挡则不执行操作,结束换挡操作。换挡程序流程,见图8。

图8 换挡程序流程
4.3 耕深PID控制子程序框图
系统先读取编码器角度从而获得耕深,经PID控制器确保耕具的准确位置。关于PID的软件控制流程,见图9。

图9 PID的软件控制流程
5 整机展示与结语
智能遥控拖拉机系统组成如图10智能拖拉机实物图所示。控制柜、液压阀及舵机、数字编码器构成。

图10 智能拖拉机实物图
整体系统可以实现稳定运行,包括前行,倒退,转弯,以及对耕作深度的控制。可以实现拖拉机在车载无人驾驶的初步设计理念。满足中国南方水田的工作要求。
猜你喜欢
小猕猴学习画刊(2021年8期)2021-08-27
岷峨诗稿(2020年4期)2020-11-18
作文大王·低年级(2020年9期)2020-10-12
作文大王·低年级(2020年9期)2020-10-12
知识就是力量(2019年12期)2019-01-14
智富时代(2018年9期)2018-10-19
智富时代(2018年9期)2018-10-19
汽车电器(2018年8期)2018-08-25
汽车之友(2016年10期)2016-05-16
