芒果采摘机参数化设计与有限元分析
2018-08-08 08:08陈启优姚克恒刘世豪
江苏农业科学 2018年14期
陈启优,姚克恒,刘世豪
(1.海南职业技术学院工业与信息学院,海南海口 570216; 2.农业部南京农业机械化研究所,江苏南京 210014;3.海南大学机电工程学院,海南海口 570228)
芒果是著名的热带水果,因品质极佳,营养价值高,被誉为热带水果之王。近年来,世界芒果栽培面积不断扩大,产量也逐年上升,在热带水果中排名第3,已成为世界五大水果之一[1]。我国是世界芒果生产大国之一,种植和生产主要分布在海南、广东、广西、福建、云南等地区。其中,海南的收获面积和产量均居全国第一,收获面积为2.46万hm2占全国的40.05%;产量为31.01万t,占全国的36.58%;单产为 8.4 t/hm2,高于全国水平[2]。由于我国目前在芒果采摘这方面机械化水平还比较低,大部分还靠人工摘采,这就使得在生产芒果这一块所需的劳动量很大。
针对上述问题,为了减轻劳动者的工作强度,提高芒果采摘的效率,需要设计一种针对芒果采摘的机器。本研究根据芒果生长的实际情况设计了一种集升降、转动、摆动、夹持、剪断和收集于一体的芒果采摘机来提高采摘效率、降低劳动量。
1 芒果采摘机的整体设计
本研究设计的芒果采摘机主要由升降机构、旋转机构、摆动机构、伸缩机构、末端执行器以及芒果收集栏和电机等部分组成(图1)。芒果采摘机采用电液共同驱动。采摘机的转动和摆动动作需要由电机驱动,升降、伸缩、夹取、剪断这4个动作需要由液压完成。整个芒果采摘机的采摘流程如下:将机器运送到采摘地点,首先通过电动机带动剪叉式升降机构的液压泵,将整个工作台调整到合适的高度;然后由电机带动旋转机构以及摆动机构,慢慢将剪刀等部件转动到适当的角度,再由液压马达将剪刀等末端执行器推到芒果果柄的位置;最后通过采用小型液压缸带动推杆来驱动连杆机构,从而带动柔性末端执行器夹紧果实并剪断果柄。芒果采摘机夹取并剪断果柄后,夹持手打开,芒果自由下落,落入柔性收集栏中,最终落入收集桶中。

2 芒果采摘机主要机构设计
2.1 剪叉式升降装置的设计
2.1.1 剪叉式升降装置的结构形式 剪叉式升降装置广泛用于高空作业,具有结构稳固、故障率低、运行可靠、安全高效、维护简单等特点。在农业作业中剪叉式升降装置配合移动设备可满足果实采摘的要求。该升降装置固定到移动设备上,可实现不同地方的采摘工作。由于芒果树品种的不同,采摘高度有所不同,可以通过增加或减少级数达到调整工作高度的目的。本研究中以二级剪式升降为设计对象,其结构简图如图2所示。
2.1.2 剪叉式升降装置数学模型的建立 以A点为坐标原点,AB为x轴,AN为y轴建立直角坐标系,P代表上平台单侧负重,剪叉升降架的一条边AC长度为L,拆去油缸,以油缸的推力F作用于J、I各销轴处,下端耳环分别标记为B、J,上端耳环分别标记为D、I,下端耳环的长度为l1,上端耳环长度为l2,建立数学模型(图3),然后用虚位移法求1个油缸所需的推力。


各点坐标值:
B点:Bx=L·cosα,βy=0,
J点:Jx=L·cosα-l1·cos(φ1-α),Jy=-l1·sin(φ1-α),
D点:Dx=0,Dy=L·sinα,
I点:Ix=l2·cos(φ2+α),ly=L·sinα+l2·sin(φ2+α),
W点:Wx=2L·cosα,Wy=2L·sinα。
假设负重P在y方向的虚位移为δw=2L·sinα·δy,由此得出I、J2点在x、y方向的虚位移:
δJx=[-L·sinα-l1·sin(φ1-α)]·δy;
δJy=-l1·cos(φ1-α)·δy;
δIy=-l2·cos(φ2+α)·δy;
δIx=[L·cosα+l2·cos(φ2+α)]·δy。
在I点处:y方向微位移与x方向微位移之间的夹角为β,J点处y方向微位移与x方向微位移之间的夹角为θ,得出:
列出虚位移方程:
-P·δwy+F·cosβ·δIx+F·sinβ·δIy-F·cosθ·δJx-F·sinθ·δJy=0。
求出液压缸所需推力F,根据实际情况,选用HSGF型号的伸缩液压缸。由此完成对该剪叉式升降架的设计以及液压缸的选取。
2.2 底座转动装置的结构设计
为实现芒果采摘机的功能,在底座部分加入转动机构,并且具有减速的功能,由于齿轮传动具有工作可靠、寿命长、传动比稳定、结构紧凑等优点,根据芒果采摘机的特点,选用齿轮传动。
动力由电机输出经过一级齿轮减速,将动力传送到行星减速机构的太阳轮进行减速,最终行星架输出动力传给底座,使芒果采摘机可以实现转动。行星减速设计是将内齿圈固定,太阳轮作为主动轮,行星轮做周转和自转,行星架作为动力输出,行星减速结构如图4所示。
2.3 采摘机摆动装置的结构设计
采摘机摆动装置在整个采摘机工作过程中起着很重要的作用。本研究按照机构布局合理、机械简单易造以及通用性良好的原则设计了图5的摆动装置。其中,由于电机的额定转速较高,输出转矩有限,无法满足机械的运动要求,因此采用谐波减速器和电动机直接配套,满足工作要求。
由于要灵活地完成采摘工作,因此同时有2个可以实现摆动的机构,然而在摆动装置的设计中,采用轴线相交且轴交角为90°的直齿锥齿轮作为动力的传动部件,主动直齿锥齿轮齿数Z1=18,从动直齿锥齿轮齿数Z2=32,摆动装置内部结构如图5所示。
摆动装置的工作原理为固联在机架的伺服电机通过联轴器,再经过谐波减速器减速后,将动力传输到直齿锥齿轮Ⅰ,直齿锥齿轮Ⅱ通过与直齿锥齿轮Ⅰ啮合来带动固联在转轴上的连接件,从而实现转动。
2.4 伸缩装置的结构设计
为满足芒果采摘的需求,并且驱动末端执行器,采用了1个伸缩机构。伸缩机构的驱动方式一般有机械式和液压式2种,在同等功率下,液压传动的体积小、质量轻,更符合芒果采摘工作的需求。因此本设计采用液压式。伸缩装置结构如图6。

2.5 柔性末端执行器的结构设计
2.5.1 柔性末端执行器的工作分析 在进行采摘作业时,执行器常直接与芒果接触,由于芒果个体差异较大,而且果皮容易受损,因此芒果采摘机的末端执行器的设计也是整个采摘机的重点。芒果的大小、形状有着较大的区别,导致采摘过程中的夹持力有所不同,所以设计的末端执行器就须要有一定的通用性。同时,夹持力的大小将会影响采摘芒果的品质,要注意不能损坏芒果的外观。因此,根据实际情况,一方面在设计过程中要有创新,来更好地满足现状,另一方面要更加注重设计的通用性,这就须要利用更加简单的结构来实现不同的功能,从而满足果农的多样化需求。
2.5.2 末端执行器的结构形式 图7为末端执行器机构,主要负责芒果的摘取。它的主要工作原理是利用连杆机构来实现抓取和夹断果柄的操作,连杆机构的驱动是利用1个小型液压缸来带动的。由于夹持装置的存在,该末端执行器对不同类型的水果都能使用,保证了整个装置的通用性。另外,为了保护芒果表皮不会在釆摘过程被破坏,在本设计中还增加了柔性抓取功能,而且抓取刚度可以调节。
2.5.3 夹持机构设计与分析 夹持机构结构如图8所示,其工作原理主要是通过连杆机构带动支持手,控制支持手的开合,从而实现对芒果的抓取与释放。其中在支持手与果实接触的那一面覆盖了1层弹性胶层,为芒果抓取过程提供了足够的摩擦力,同时对芒果表皮的损伤也较小[3]。
该机构设计原理如下:固定在固定板上的伸缩液压缸做伸缩运动,带动焊接在伸缩液压缸上的推杆做直线往复运动,同时通过轴销定位的连杆也做平面运动,使固定在固定板的平行四边形连杆机构也做往复运动,固定在平行四边形连杆机构上的夹持手就能够实现开闭动作,即实现了抓取动作。在该机构中增加弹簧的作用是实现了末端执行器的柔性抓取,通过调节螺母可以调节弹簧的预紧力,也可以通过换取不同弹性系数的弹簧实现柔性抓取[4],这样就避免了采摘过程中由于抓取力过大导致芒果表面损坏的问题。
2.5.4 果柄剪断机构的设计 通过试验得到芒果果柄的剪断力(表1)。

表1 果柄剪断力数据
针对表1中的数据,比较剪切和扭断2种方式,在扭断的过程中果柄和果实接触部分最先分离,在此过程中果柄中的汁液会洒落在果实表面,裸露在空气中,会使果实表面变黑,影响芒果质量,所以不适合芒果的采摘,最终选用剪断收获。本研究设计的果柄剪断机构结构如图9。
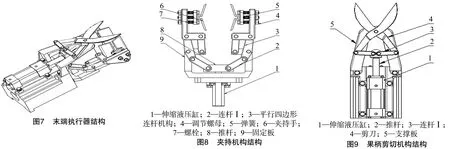
该机构的工作原理如下:由伸缩液压缸提供动力,推动推杆做往复直线运动,使用轴销连接在推杆上的连杆Ⅰ做平面运动,从而使通过轴销连接在支撑板的剪刀做剪断运动。
3 基于SoildWorks-Simulation的零件强度有限元分析
3.1 芒果采摘机静力学分析
对芒果采摘机进行静力学分析的目的主要是获得齿轮和轴的受力情况。进行静力学分析计算时,只需要计算各个节处在最极端情况下扭矩的大小即可,把计算所得扭矩作为零件所受最大扭矩的标准[5]。由于该采摘机中2个摆动机构所选择结构和材料均相同,因此只需要计算受力最大的一个。在SoildWorks可以对装配体的质量属性进行测量,但必须对各个零件进行材料编辑,其材料明细如表2所示。
利用SoildWorks对模型进行质量分析,在受力最大的状态(图10),得出质量m=90.58 kg,重心位置x=963.16 mm、y=585.709 mm、z=-16.529 mm,测量出重心距离齿轮和轴中心的距离l=600.34 mm。
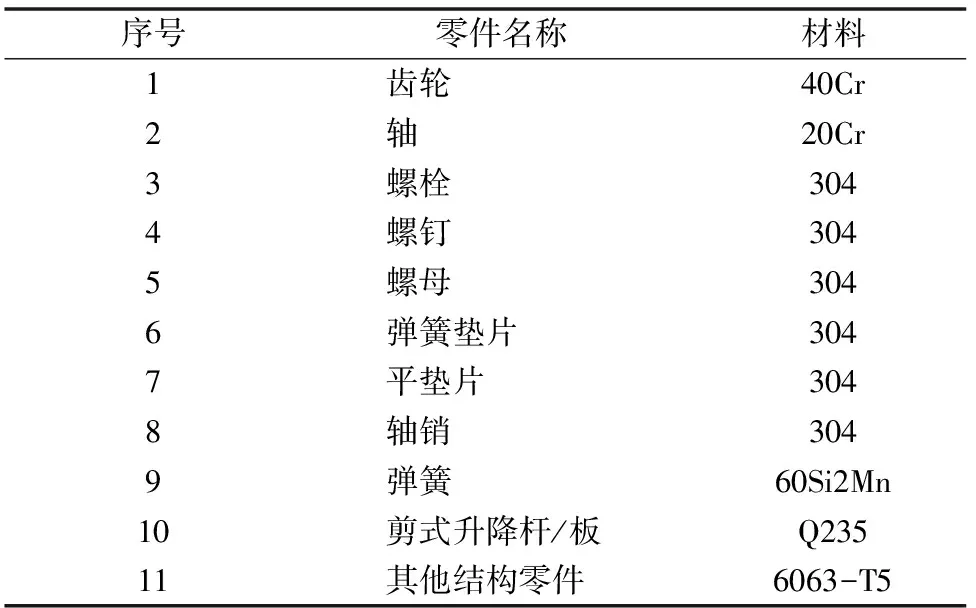
表2 材料明细
根据公式可以得出最大转矩:

Tmax=m·g·l=90.58×10×600.34×10-3=543.79 N·m
3.2 直齿锥齿轮强度分析

根据计算公式如下:
Fr=Ft·tanα·cosδ;
Fa=Ft·tanα·sinδ。
带入数据求得:
Ft=8 965.62N;
Fr=1 599.87N;
Fa=2 844.22N。
3.2.2 有限元分析求解 使用SoildWorks-Simulation对零件模型进行网格化处理。其中网格质量和密度对有限元的计算结果影响较大。因此网格划分时,对计算精度贡献较大的部分的网格应细化,而适当粗化对计算精度贡献不大的部分[6]。所生成的齿轮网格如图11、图12所示。

经过SoildWorks Simulation模块分析处理后,得到锥齿轮应力云图如图13、图14所示,观察2个齿轮的应力图解得出主动直齿锥齿轮范式等效应力(von Mises)最大值为481.006 MPa、从动直齿锥齿轮范式等效应力最大值为 518.237 MPa。根据对齿轮定义材料为40 Cr,材料的屈服强度为785.000 MPa,均大于上述值,二锥齿轮满足应力要求,选用合理。



3.3 传动轴强度分析
轴的分析情况与齿轮的分析类似,对轴施加转矩、力。生成网格如图15所示,根据求解得到的应力云图(图16),得出范式等效应力最大值为408.256 MPa,根据对轴定义材料为20Cr,材料的屈服强度为540.000 MPa,540.000 MPa>408.256 MPa,轴满足应力要求,选用合理。


4 结束语
本研究提出了一种芒果采摘机的总体设计,其中对芒果采摘机的剪式升降装置、转动装置、摆动装置、伸缩装置和柔性末端执行器这几个主要部分进行了具体的结构设计,并利用数学建模等方法进行辅助设计;运用SoildWorks-Simulation插件对关键零件强度进行有限元分析,得出应力图,与所选材料的屈服强度进行比,验证了零件选用的合理性。本研究设计的芒果采摘机在人为操作配合下能够实现对芒果的采摘,减轻果农的工作强度,能够为芒果采摘自动化的发展提供参考。
猜你喜欢
新疆农业科学(2023年6期)2023-07-13
湖南农业科学(2022年5期)2022-06-22
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
山东农业工程学院学报(2019年3期)2019-05-11
山东冶金(2018年5期)2018-11-22
制造技术与机床(2017年3期)2017-06-23
中南大学学报(自然科学版)(2016年2期)2017-01-19
光学精密工程(2016年6期)2016-11-07
锻压装备与制造技术(2016年3期)2016-06-05
应用技术学报(2014年3期)2014-02-28