
液压型医用牵引床控制系统的设计
2018-08-09 10:02赵亚丽李金霞张立强
中国医疗设备 2018年8期
赵亚丽,李金霞,张立强
1.兰州总医院 a.门诊部;b.儿科,甘肃 兰州 730050;2.兰州理工大学 温州泵阀工程研究院,浙江 温州 325105
引言
近年来随着我国人口日益老龄化,患有腰椎间盘突出症(Lumbar Disc Herniation,LDH)的老年患者数量越来越多。据相关资料统计,其发病率高达2.5%~13.5%[1]。腰椎间盘突出症是由于腰椎间盘的各部分(髓核、纤维环及软骨板)功能退行改变后,在外力因素作用下,导致纤维环破裂,髓核组织从纤维环的破裂处脱出,使得脊椎神经根收到刺激或压迫,引起人们腰部、腿部等的不适症状。目前,医学上治疗腰椎间盘突出的手段主要有两种方式:手术治疗和非手术治疗[2-4]。非手术治疗最主要的手段是保守治疗法,即牵引治疗[5],牵引床是牵引治疗的典型医疗器械[6]。
采用牵引床对患者进行腰椎或颈椎的牵引治疗,临床证明能够达到较好的康复疗效[2-8]。因此医疗上对牵引床的需求也越来越大,使用也越来越广泛。由于目前国内外普遍采用的牵引床的基本结构都是机械—电气—单片机控制模式,存在质量重、噪声大、误差大、设置复杂,且驱动的平稳性不高等一系列的缺陷[9-10]。
本牵引床设计采用双液压缸驱动以及计算机闭环控制技术来实现牵引、旋转、倾角、摆角四个动作的多功能控制,满足牵引治疗的需要。其操作简单、驱动过程平稳舒适,提高了牵引力的可控性和稳定性,降低了工作噪声和牵引误差。
1 牵引床的结构设计及工作原理
1.1 结构设计
一种液压型医用牵引床的外观图及结构原理图,见图1。液压型牵引床主要由床体、浮动床板和液压系统组成。该牵引床采用双液压缸传动系统驱动两个浮动床板,实现牵引、旋转、摆角和倾角4个基本动作,并通过计算机控制系统转化为相对应的物理量,如拉力、距离、角度、时间等参数的变化。通过程序控制可以将各种参数的任意组合,实现理想的治疗效果。

图1 液压型医用牵引床外观图(a)及结构原理图(b)
1.2 工作原理
牵引治疗法主要是根据生物力学原理和中医推拿正骨原理而产生的。牵引床从治疗机理上来说,吸取中医牵引治疗和推拿治疗的精华,将传统中医治疗腰椎、颈椎等的手法通过机械装置来完成,使得治疗更可靠,同时也减轻了医生的负担。牵引床通过应用力学中作用力与反作用力原理,对腰椎、颈椎等施加牵引力,拉宽椎间隙,减轻椎间压力,舒筋活络,改善局部血液循环,实现腰椎、颈椎等骨骼疾病的治疗[11-13]。
人体在牵引过程中可以俯卧于牵引床上,当需要对腰椎进行牵引时,浮动床板通过滚轮沿着床体轨道床体上根据液压缸的控制,实现牵引;当需要对颈椎进行牵引时,液压缸控制浮动床板,使其在床体上移动,完成牵引。根据治疗方案,牵引工作可以分步完成也可以同时完成。另外,如果需要对床体进行倾斜或旋转,可以通过控制两个液压缸的一伸一缩动作来实现,精确控制两个液压缸的伸出或者缩回的长度可以获得不同的床体倾斜角度或者旋转幅度。
牵引床的总体参数根据人体的最大生理活动范围以及临床需求所确定[11-13]。牵引力以达到颈椎或腰椎椎间隙的增大而不会产生肌肉、关节损伤为目的,牵引时间不宜过长,以免造成肌肉和韧带的静力性损伤。该液压型牵引床的牵引力为300~1500 N,牵引距离0~70 mm,快速牵引时间小于等于0.5 s,慢速牵引时间大于等于4 s,系统工作压力为1 MPa。
2 牵引床液压控制系统设计
液压控制系统具有结构紧凑、体积小、重量轻、控制平稳等优点,可用于医疗装备的控制[14-15]。根据腰椎牵引需要,牵引床的牵引过程应考虑持续牵引和间隙牵引两种工作状态。持续牵引是指一次牵引过程经过一段休止时间①之后,牵引力达到设定值,保持不变,完成牵引工作;而间隙牵引过程会有几次牵引力的减小,经过休止时间④后,再次循环牵引,主要适用于年纪较大的人群。其示意图,见图2。
双液压控制系统的工作原理图,见图3,主要由油箱、液压泵、溢流阀、电磁换向阀、单向阀、液压缸及蓄能器组成。通过液压缸的活塞杆实现浮动床板的运动;溢流阀当作安全阀使用,当压力超过系统设定值时,打开溢流,起过载保护作用;通过压力表实时检测油路的压力;蓄能器作为牵引动力源之一,用来将储存的多余液压油在需要时释放出来。蓄能器不仅将能量高效回收,还增加了系统的稳定性,结构简单、设计方便且效率高。在该系统中采用三重保护措施,即溢流阀、蓄能器和压力表共同保证系统安全可靠。
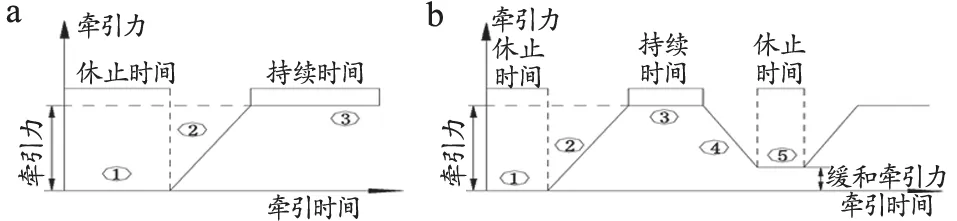
图2 牵引过程示意图

图3 液压控制系统工作原理图
当牵引床不工作,即初始状态时,两液压缸活塞杆均处于液压缸最底部,浮动床板1、2在水平面并紧。牵引床工作时,首先通过计算机设定需要牵引的距离x1和x2,油液从液压缸的无杆腔进入,推动活塞杆使其运动距离L-x,处于设定位置。换向阀6的中位机能是P型的,即当油液通过该阀时,两个工作油口均有压力油,分别控制两个液压缸的运动。也就是说,牵引床可以同时完成腰椎和颈椎预先设置好的牵引工作。当仅需要对颈椎进行牵引时,电磁换向阀6处于左位,换向阀9左右切换,根据溢流阀10和11的设定值控制液压缸14,从而控制浮动床板1实现对颈椎的牵引;当仅需要对腰椎进行牵引时,电磁换向阀6处于右位,换向阀15左右换向,控制液压缸20,从而控制浮动床板2实现对腰椎的牵引。
当换向阀6接通到左位时,若活塞向左运动,当换向阀9突然换向,活塞左侧的压力由于运动部件的惯性而突然升高,当压力超过反应灵敏的小型直动式溢流阀10的设定压力时,溢流阀10打开溢流,以减小管路中的液压冲击,使浮动床板1运动平稳;同时,通过单向阀13向液压缸的右腔补充油液。当换向阀6接通到右位时,溢流阀16、17同样起到平稳浮动床板2运动的作用,单向阀18、19起补油作用,工作原理相同。当活塞杆运行距离x后,液压缸处于静止状态,满足牵引的需要。牵引工作完成后,电磁阀断电,使得活塞杆移动距离L,恢复至初始零位。
在液压型牵引床的两个液压缸上安装有位移传感器和力传感器,可实时检测位移和力的大小,以达到医疗所需的精确值。通过液压传动与控制,能够有效地提高牵引床的工作效率,而且驱动平稳,减小了治疗过程中的振动与噪声。
3 牵引床计算机控制系统设计
鉴于计算机控制系统的方便快捷、控制精度高,且具有良好的开发性等优点,对牵引床的控制采用计算机控制。牵引床采用计算机闭环控制的原理图及控制系统框图,见图4。计算机主要完成比较运算、控制和输出的功能。由于计算机只能识别数字信号,因此需要将反馈测量元件输出的模拟信号转换为数字信号;同时,牵引床的执行机构也需要将计算机输出的数字信号转换为模拟信号。为使得牵引床控制系统结构紧凑,计算机可选用触摸屏,传感器及信号转换器可选用集成一体式[15-18]。
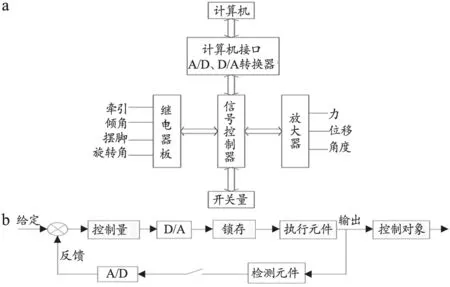
图4 计算机闭环控制系统框图
由图4可知,将给定的牵引力、牵引距离和角度等,通过控制器,D/A转换后,控制执行元件实现该设定;同时,由检测元件对输出量进行检测,A/D转换器转换为标准数字信号,反馈给计算机,由计算机对比执行元件的实际运行参数与给定参数的偏差,并根据偏差调整输入控制器的信号,完成牵引床驱动系统的闭环控制,最终实现床体的精确运动,保证牵引治疗的有效性和可靠性。
4 牵引床的临床操作
液压型牵引床操作流程与常见机械—电气控制模式的牵引床操作流程类似,主要有:① 设备初始化,确认设备正常;② 患者就位,患者平躺在床面上并扣紧上身和下肢的绑带;③ 选择牵引模式,设定牵引力、牵引时间,是否成角牵引,间歇牵引还是持续牵引;④ 牵引过程监控,包括牵引不适时的紧急退回操作;⑤ 牵引治疗完成后的缓慢复位,以及患者短暂平卧休息后的离位。
需要注意的是,在牵引过程中,应根据患者自身的感觉设定牵引力大小和牵引时间的长短,第一次牵引时牵引力不要调至过大。间歇牵引牵引力建议从体重的1/4逐渐调至体重的1/2;持续牵引牵引力建议从5~7 kg逐渐调至体重的1/3。禁止空腹牵引,腰椎牵引宜在饭后30 min以后,且饮食不宜过饱,以免引起胃部不适。牵引中如有不适,可适当减小牵引力或者缩短牵引时间,甚至使用紧急退回功能,将牵引床复位。
5 结论
针对牵引床的各种需求,并结合我院当前牵引床的临床应用,笔者合作液压专业人员,应用计算机闭环控制的双液压缸驱动技术,设计了一种液压型医用牵引床控制系统,能够实现医用牵引床的精确、平稳控制,满足颈椎和腰椎等骨骼的多方位、全方面的治疗需求。
考虑我院当前牵引床临床使用中的一些不足,理论分析及初步试用表明,采用双液压缸系统和计算机闭环控制,可使医用牵引床的各种牵引性能更易实现;对牵引床牵引、旋转、倾角、摆角的四个动作的控制更加精确,控制过程平稳,而且能够有效减小牵引床动作过程中的振动和噪声。
当前虽有一些相关牵引床专利,但目前市场尚无成熟的液压型牵引床产品,医疗上仍普遍采用机械—电气控制模式的牵引床;基于计算机闭环控制双液压缸驱动的液压型医用牵引床,具有产品推广的价值。
猜你喜欢
中国医疗设备(2022年4期)2022-04-25
中国应急管理科学(2022年1期)2022-04-18
哈尔滨铁道科技(2020年3期)2021-01-18
铁道建筑(2019年12期)2020-01-02
科技创新与应用(2017年26期)2017-09-12
中学生数理化·高一版(2016年4期)2016-11-19
中国科技纵横(2016年14期)2016-10-10
电子制作(2016年19期)2016-08-24
科技与创新(2016年6期)2016-04-21
中国医疗器械杂志(2014年2期)2014-03-04
