面向自动导航拖拉机的农田障碍物识别研究
2018-08-10 09:23袁文涛胡书鹏
农机化研究 2018年10期
袁文涛,刘 卉,胡书鹏
(1.首都师范大学 信息工程学院,北京 100048;2.北京农业智能装备技术研究中心,北京 100097)
0 引言
农业自动化、机械化是现代农业发展的必然趋势,而农业自动化研究的一个重要方向是实现农业机械的自主导航和有效避障[1-2]。对于自动导航拖拉机而言,农田中可能会存在诸如电线杆、树木、机井等静态障碍物,这些静态障碍物可以在路径规划时避开,但增加了路径规划的复杂度;此外,在农田中也可能会出现人、其它农业机械等动态障碍物,这些动态障碍物只能在农机作业过程中实时探测并采取必要的避障措施[3-5]。因此,要使自动导航拖拉机在行进的过程中避开障碍物,就需要有效识别障碍物并对其方位、距离、宽度及状态等特征信息进行精确的计算。
目前,广泛应用在移动机器人避障领域的传感器主要有:立体视觉、超声波、红外和激光雷达。采用立体视觉来进行环境感知和障碍检测,是一种很有前途的方法,但因为视觉图像处理过程比较复杂,动态性能较差,因而目前难于适应实时性要求很高的农机自动导航作业;超声波测距仅仅适用于对环境感知精度要求不高的场合;红外测距受环境的影响较大,物体的颜色、方向、周围的光线等均能引起测量误差。任何一种测距技术都有其优点和局限性,相比而言,激光测距传感器具有独特的优势,它具有测距精度高、分辨率好、抗干扰能力强等诸多优点,能够同时满足精度和实时性要求,特别适用于实时控制系统的环境感知研究[6]。Noguchi等利用二维激光测距仪开发出了一种可以在果园环境应用的自动导航系统,使用一辆52kW的拖拉机作为实验平台,导航中航向角误差为1.5°,横向误差为0.11m[7]。刘沛等为了实现果园作业的自动化,以拖拉机为研究对象,采用激光导航方式实现了果园机械的自动导航,当拖拉机以0.27m/s 速度直线行走30m时,最大横向偏差为0.15m[8]。任立敏等设计了包含紧急避障、精确规划、动态避障的移动机器人控制结构和避障算法,并在实际的环境中分别进行了单障碍物、多障碍物和动态障碍物实验[6]。在大部分实验中,机器人都能够以平稳、流畅的路径避开障碍物。
本文介绍了一种面向自动导航拖拉机的典型农田障碍物检测和识别方法。在自动导航拖拉机平台上装载LMS200激光测距仪,针对树木、障碍拖拉机分别进行障碍物检测,实现对目标障碍物方位、距离、宽度等特征信息的有效识别。
1 自动导航拖拉机避障测试平台
基于激光测距传感器构建面向自动导航拖拉机的避障测试平台。
1.1 自动导航拖拉机系统
本研究所采用的自动导航拖拉机系统采用了GNSS导航方式,将GNSS定位装置、车载导航控制终端、自动导航控制器安装在驾驶室内;将GNSS天线固定在车顶,通过电台接收来自GNSS基准站的差分信号并达到RTK固定解状态;车载导航控制终端根据位姿数据及预先设定的导航路线,计算并向控制器输出控制指令,控制器将控制信号传输给液压系统,并控制阀门开关,实现对拖拉机转向机构的控制。
1.2 激光测距传感器
激光测距传感器是通过测量激光脉冲的飞行时间来检测目标物体的距离。在测量过程中,激光器发射激光束,并且接收从被测物体反射来的激光束,如图1所示。激光器发射的激光脉冲经过分光器后,分为两路:一路进入接收器,另一路则由反射镜面发射到被测障碍物的表面,反射脉冲也经由反射镜返回接收器[9],由光速与反射脉冲的时间乘积得到检测目标物体的距离。

图1 激光测距仪工作原理图
激光束从传感器内部的旋转光镜偏转,通过扫描周围环境,形成一个扇面扫描区域,由接收到的一系列脉冲序列来确定目标物体的轮廓线。测试平台安装了德国SICK公司的LMS200激光测距传感器,能够设置扫描激光前方180°区域或120°区域;角度分辨率可设置为0.5°或1°;测量精度分为厘米模式和毫米模式,在毫米模式下能够测量的最大距离为8m,在厘米模式下能够测量的最大距离为80m。测量过程中,激光测距传感器通过RS232串行接口将测量数据实时传送给自动导航拖拉机车载导航控制终端,进行障碍物检测处理。
2 农田障碍物检测方法
在农田环境中识别障碍物特征信息,主要包括检测障碍物方位、障碍物中心到自动导航拖拉机激光发射器的距离及障碍物形态信息。
2.1 障碍物的定位方法
为实现农田环境下障碍物的检测与识别,首先必须确定障碍物相对自动导航拖拉机的位置。在农田中,利用激光测距传感器实时扫描拖拉机行进前方的障碍物,通过对扫描点的分析发现障碍物出现在图像内凹点位置。凹陷部分越大,则表明障碍物的宽度越大。
以激光传感器发射器为原点建立一个极坐标系,如图2所示。激光传感器输出所测障碍物的点集合SP表示为[10]

(1)

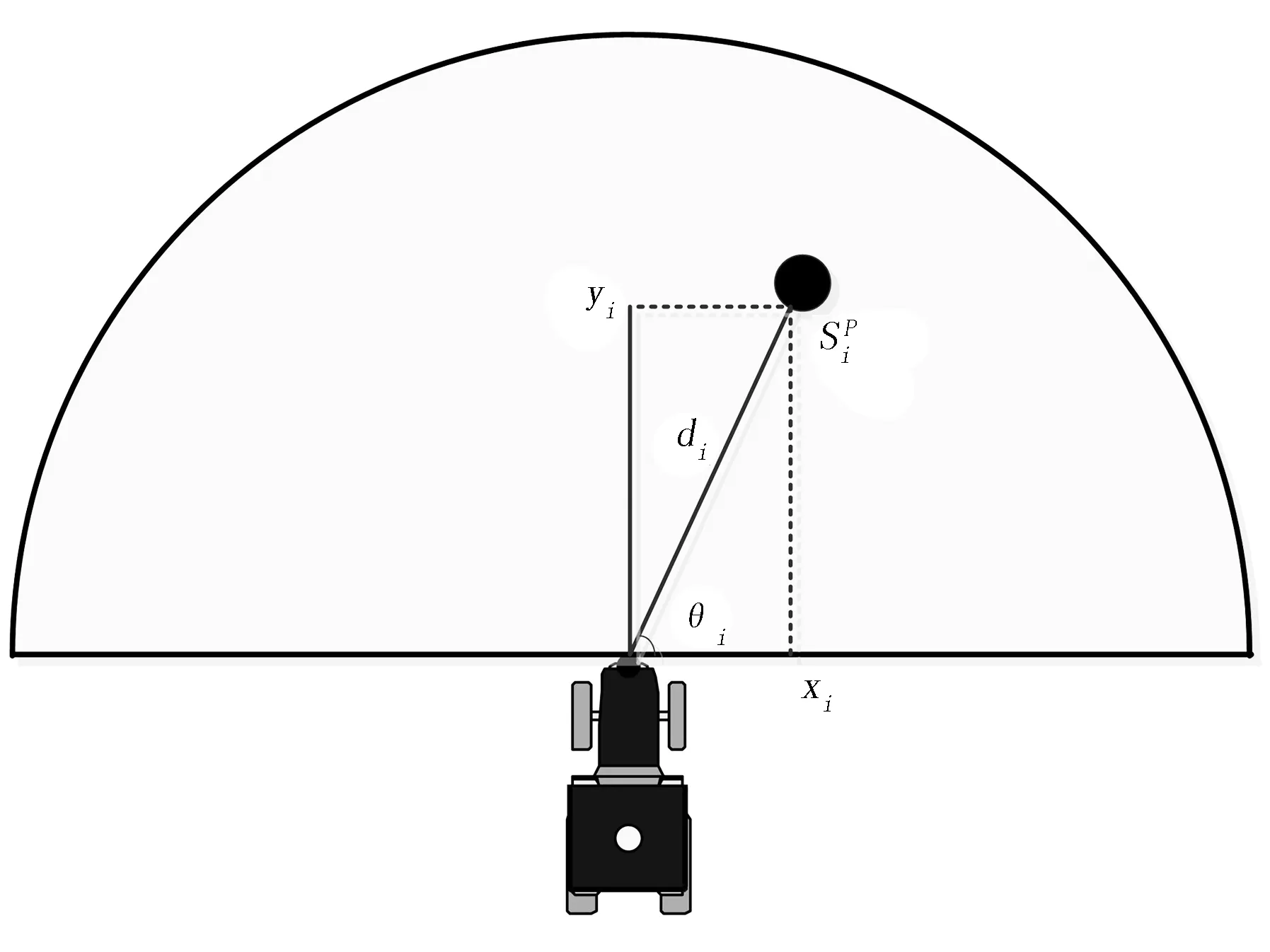
图2 直角坐标系转换
为了进一步得到障碍物的位置数据,将极坐标系转化为以激光发射器为原心的笛卡尔直角坐标系,则被测障碍物边缘点的集SV合为
(2)

(3)
其中,V表示传感器直角坐标系;SVi=(xVi,yVi)T表示在V坐标系中障碍物的位置数据。
激光测距传感器扫描自动导航拖拉机前方180°范围内障碍物,采用如下方式定义障碍物的方位:以拖拉机行进方向,即传感器直角坐标系y轴正方向为基准,沿基准方向顺时针旋转为正方向,逆时针旋转为负方向。由此可知,障碍物出现的方位范围在行进方向的±90°之间。
2.2 障碍物边缘拟合
激光测距传感器完成1次扫描障碍物后,获得障碍物边缘的距离和角度数据集,然后由式(3)转换得到目标障碍物边缘在传感器直角坐标系的离散点集。采用最小二乘算法对目标障碍物的边缘进行拟合处理,获得障碍物边缘曲线。
设拟合曲线方程为
y=a0+a1x+a2x2
(4)
测量点与拟合曲线的偏差为
(5)
则偏差平方Q和为
(6)
通过最小Q值确定拟合曲线,即确定a0、a1和a2。为此,求Q对a0、a1和a2的偏导,得
(7)
由式(7)求解a0、a1和a2,最终求得拟合的障碍物边缘曲线。在障碍物拟合曲线基础上,求解障碍物形态特征信息。
2.3 障碍物形态特征信息识别
为了在避障过程中自动导航拖拉机实施最优避障,必须获得障碍物的宽度特征和障碍物中心点。
根据障碍物边缘曲线可得最小外接矩形,并由此计算障碍物的宽度值w,即
(8)
其中,d1为激光测距传感器检测到障碍物一侧边缘的第1条反射线的距离长度;df为激光测距传感器检测到障碍物另一侧边缘的第f条反射线的距离长度。β可由下式计算得到,即
β=θf-θ1
(9)
其中,θ1为第1条反射线与V坐标系水平x轴的逆时针夹角;θf为第f条反射线与V坐标系水平x轴的逆时针夹角。
障碍物的中心点为障碍物轮廓拟合曲线的中心位置,中心距离是指激光测距传感器中心点到障碍物中心点的距离。
2.4 障碍物识别精度
本研究使用均方根误差来评估障碍物特征信息的识别精度。采用RTK-GPS接收机分别测量激光测距仪发射器位置和障碍物中心位置,以标定障碍物特征信息的真值,将RTK-GPS接收机输出的大地坐标转换为平面坐标,再由平面坐标计算障碍物中心位置相对自动导航拖拉机的距离和方位。
均方根误差是观测值与真值偏差的平方和与观测次数n比值的平方根。均方根误差对一组测量中的特大或特小误差反映非常敏感,所以均方根误差能够很好地反映出测量精度。
障碍物距离特征识别精度σd为
(10)
其中,dobs表示障碍物距离特征真值数据;dmea表示激光传感器测量距离数据。
障碍物方位特征识别精度σφ为
(11)
其中,φobs表示障碍物方位特征真值数据;φmea表示激光传感器测量方位数据。
障碍物宽度特征识别精度σw为
(12)
其中,wobs表示障碍物宽度特征真值数据;wmea表示激光传感器测量宽度数据。
3 田间试验
3.1 试验设计
在小汤山国家精准农业示范基地,进行了农田障碍物检测试验。试验中,在安装有MG-1102型自动导航系统的约翰迪尔904的拖拉机上,加装德国SICK公司的LMS200激光测距传感器,安装位置离地65cm,如图3所示。设置LMS200扫描范围为180°,角度分辨率为0.5°,最大测量距离为80m。
试验1:选取宽度为0.23m、周长为0.74m的树木作为目标障碍物。试验2:选取宽度为4.39m的另一辆拖拉机作为目标障碍物,预设场景为障碍拖拉机垂直于自动导航拖拉机前行的方向出现在前方。针对上述两种类型障碍物进行了检测试验与特征信息提取处理。
3.2 试验结果与数据分析
1)障碍物定位结果。在既定预设场景下,进行了3组方位、3组距离的多次试验。表1为树木障碍物的试验数据,表2为拖拉机障碍物的试验数据。表中左侧为障碍物特征信息的标定值;右侧为激光测距传感器的测量值。从试验结果可知:此障碍物识别系统对于障碍物宽度特征的识别精度,会随着标定距离的增加而降低。

图3 自动导航拖拉机车载系统

标定值方位/(°)中心距离/m测量值方位/(°)中心距离/m宽度/m-44.692.00-44.131.930.23-42.034.92-41.254.930.23-42.479.94-42.009.950.18-1.272.02-1.751.970.24-2.295.00-2.004.980.18-2.699.93-2.509.960.1835.742.0036.251.980.2536.725.0037.254.980.2337.089.9637.509.970.20
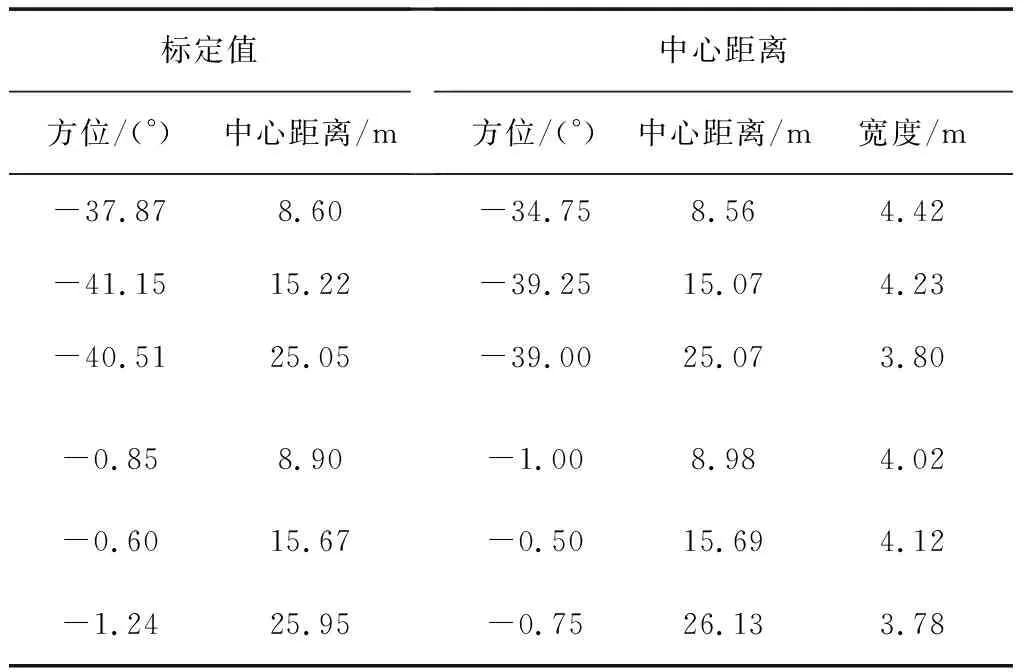
表2 障碍物为拖拉机的试验结果
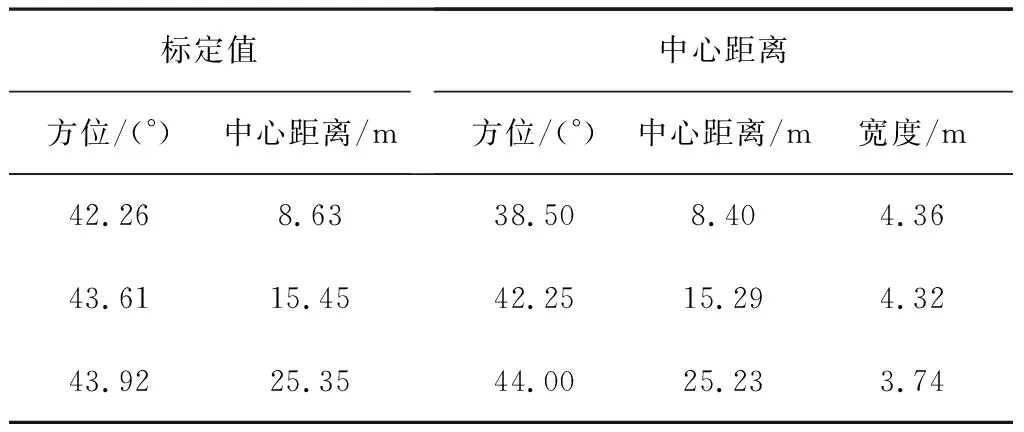
续表2
2)障碍物形态特征拟合。图4为树木障碍物的边缘曲线拟合结果。图4中,树木方位标定值为-1.27°, 中心位置到激光测距传感器距离标定值为2.02m,弧线是拟合的树木障碍物边缘轮廓,矩形框为树木障碍物的最小外接矩形。

图4 树木障碍物的边缘曲线拟合结果
图5是障碍拖拉机在8、15、25m处的边缘形态特征。由图5可以看出,激光测距传感器能够可靠地检测障碍物的边缘轮廓。将标定值为8m处的障碍物拖拉机进行了边缘曲线拟合处理,可以清晰地辨识出障碍拖拉机的前轮和后轮的凸出部分,矩形框为障碍物的最小外接矩形。

图5 障碍拖拉机的边缘曲线拟合结果
3)障碍物识别精度分析。根据式(10)~式(12),计算激光测距传感器的测量值与标定值之间的均方根误差,如表3所示。
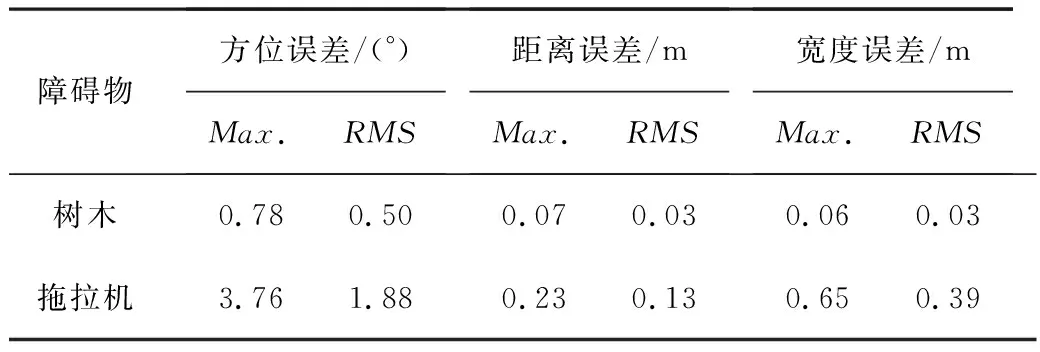
表3 障碍物特征的均方根误差
表3中:以树木为障碍物时,识别树木的方位、距离和树木宽度的均方根误差分别为0.5°、0.03m、0.03m;以拖拉机为障碍物时,识别障碍拖拉机的方位、距离和宽度的均方根误差分别为1.88°、0.13m、0.39m。对于障碍拖拉机宽度的识别精度相比树木宽度的精度有所下降,主要是因为障碍拖拉机相距自动导航拖拉机的距离较远,识别精度会随着距离的增加而有所降低。试验数据处理结果表明:此障碍物识别系统能够有效识别树木和障碍拖拉机的方位、距离及宽度等特征信息,能够为下一步实现障碍物避让提供有效的数据支持。
4 结论
1)通过加装LMS200激光测距传感器,构建了面向自动导航拖拉机的避障测试平台。
2)基于避障测试平台获取障碍物数据,通过对激光数据解析、坐标系转换及障碍物边缘拟合,实现了障碍物方位、距离、宽度等特征信息的有效识别。
3) 针对典型农田障碍物——树木和障碍拖拉机,进行了障碍物检测试验。采用RTK-GPS接收机的定位数据标定障碍物,并进行了识别精度检验。树木的方位、距离和宽度的识别精度分别为0.50、0.03m、0.03m,障碍拖拉机的方位、距离和宽度的识别精度分别为1.880、0.13m、0.39m。试验结果表明:避障测试平台能够有效地识别自动导航拖拉机前方的障碍物。
猜你喜欢
幼儿园(2021年12期)2021-11-06
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
制导与引信(2017年3期)2017-11-02
电脑知识与技术(2016年7期)2016-05-19
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31