马铃薯覆膜播种膜沟扎孔刀的运动分析与试验
2018-08-10 02:25张志强吴英思杜文亮樊明寿
农机化研究 2018年12期
张志强,陈 伟,吴英思,杜文亮,樊明寿
(内蒙古农业大学 a.机电工程学院;b.农学院,呼和浩特 010018)
0 引言
内蒙古是我国旱作马铃薯的主产区之一,水资源短缺制约着马铃薯单产和总产的提高[1-2]。地膜覆盖种植马铃薯在增温、保水等方面都获得了很好的效果[3],是该地区马铃薯增产采用的重要技术手段[4]。
2CM-4型旱作马铃薯微垄覆膜侧播机(以下简称播种机)是为了适应发展干旱半干旱地区马铃薯规模化种植而研制的,可一次完成开沟、施肥、播种、起垄、整形、全铺膜和覆土[5-6]等作业。其中,一幅两垄铺膜形成的膜沟需设计扎孔装置,即根据种薯位置在铺膜后、覆土前对种薯附件的地膜进行自动扎孔,以便引导全膜覆盖种植收集的雨水渗入膜沟土壤。扎孔装置的核心部件是扎孔刀,其设计直接影响扎孔效果。鉴于此,对扎孔刀进行运动分析,从理论上计算出在播种机牵引运动和电吸盘杠杆运动的共同作用下扎孔刀不同运动过程中相对地面的运动轨迹图。从轨迹图中对划口长度、提刀的恢复过程进行分析,检验是否有挂膜现象发生,从而为扎孔刀的设计与试验提供理论支持。
1 马铃薯覆膜播种膜沟扎孔装置简介
马铃薯覆膜播种膜沟扎孔的目的是为了在聚乙烯地膜上扎渗水孔,雨水将会通过渗水孔渗到膜下种薯附近的土壤内,解决了膜沟雨水的渗入问题。扎孔装置是马铃薯覆膜播种膜沟扎孔的核心装置,由电吸盘[7]和尼龙[8]杠杆组成,如图1所示。工作时,电吸盘通电后,杠杆一端的铁片将会被快速吸附到电吸盘表面,另一端则带动扎孔刀完成下刀过程;电吸盘持续通电,扎孔刀保持下刀完成后的动作一段时间;到达预定时间,扎孔完毕,电吸盘断电,杠杆在弹簧的作用下恢复到原来的位置,为下一次的扎孔做准备。扎孔装置工作状态如图2所示。
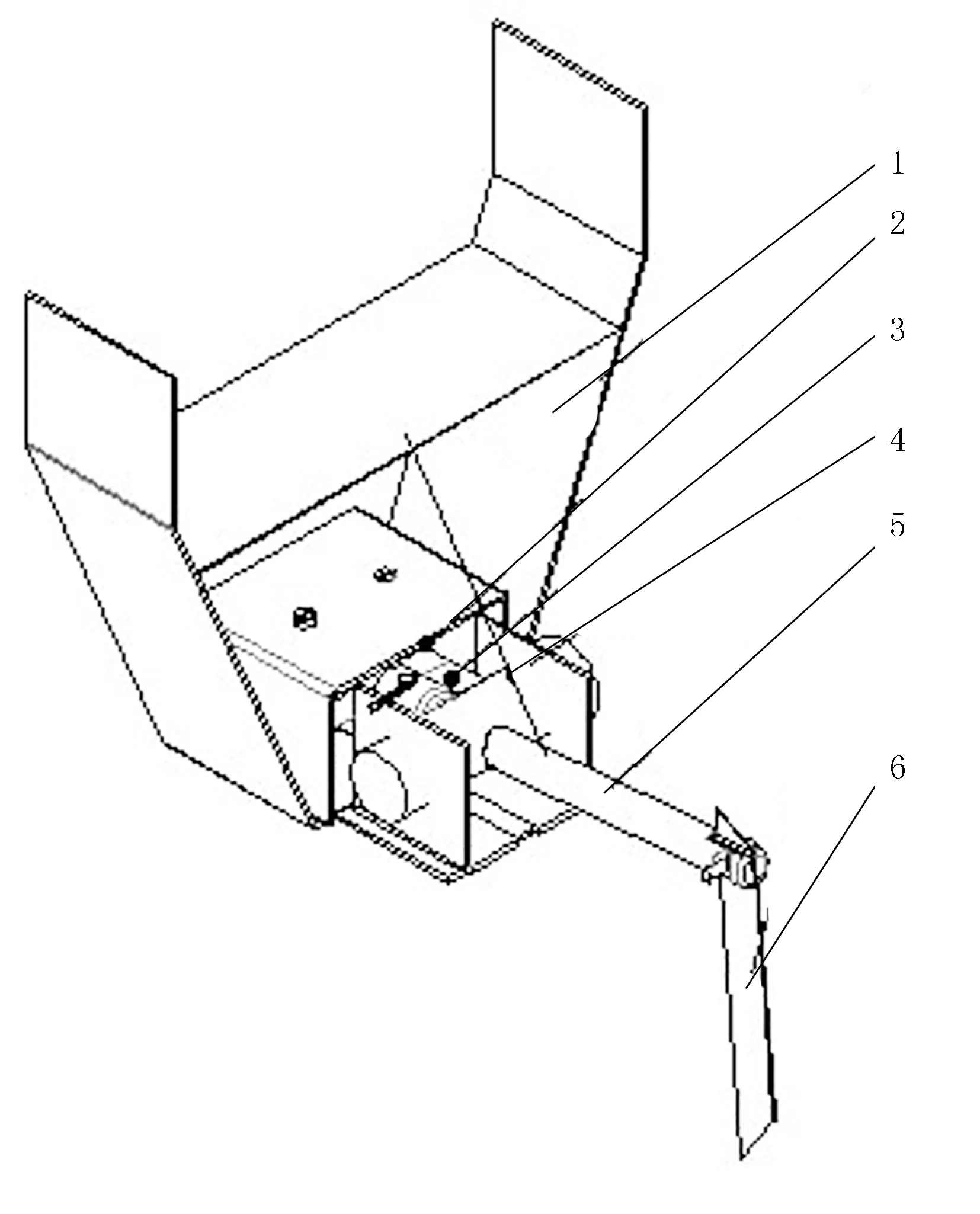
1.机架 2.电吸盘 3.铁片 4.弹簧 5.杠杆 6.扎孔刀
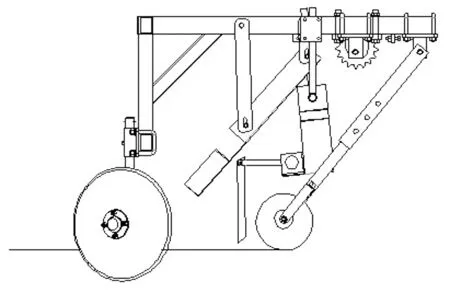
图2 扎孔装置工作图Fig.2 The prick hole installation working drawing
2 扎孔刀的结构设计
根据地膜的机械性能[9](见表1)可以看出:地膜的拉伸强度较大。为了保证扎孔刀能将膜顺利划破,扎孔刀在与膜接触的瞬间需要有较大的初始速度。下刀过程中,受ELE-P40/25电吸盘吸力的影响,扎孔刀的质量需严格控制;划膜过程中,扎孔刀破膜宽度与扎孔刀自身厚度相一致,划膜长度要保持在100mm以下。扎孔刀的恢复过程是利用弹簧的弹力将扎孔刀恢复到初始位置,由于弹簧弹力有限,扎孔刀受到地膜对其恢复到原状的阻力要尽可能小,3个过程中都不允许出现挂膜现象。结合以上对扎孔刀的要求,应用SolidWorks软件[10-13]对其进行三维建模,设计了如图3所示的扎孔刀。
受加工设备及工艺的限制,扎孔刀材料采用1.8mm钢板制作,长度150mm,宽度12mm。扎孔刀上方孔是扎孔装置与扎孔刀连接时的螺栓安装孔,中间设有的两个椭圆形槽使扎孔刀整体质量减轻了57.14%;刀尖沿前进方向一侧开刃用于扎破膜后的划膜过程;刀尖相反于前进方向一侧设计成圆滑的弧形状,一方面可以减轻扎孔刀扎孔完成后恢复到初始位置时所受的阻力,另一方面也可避免在这一过程中发生挂膜现象。
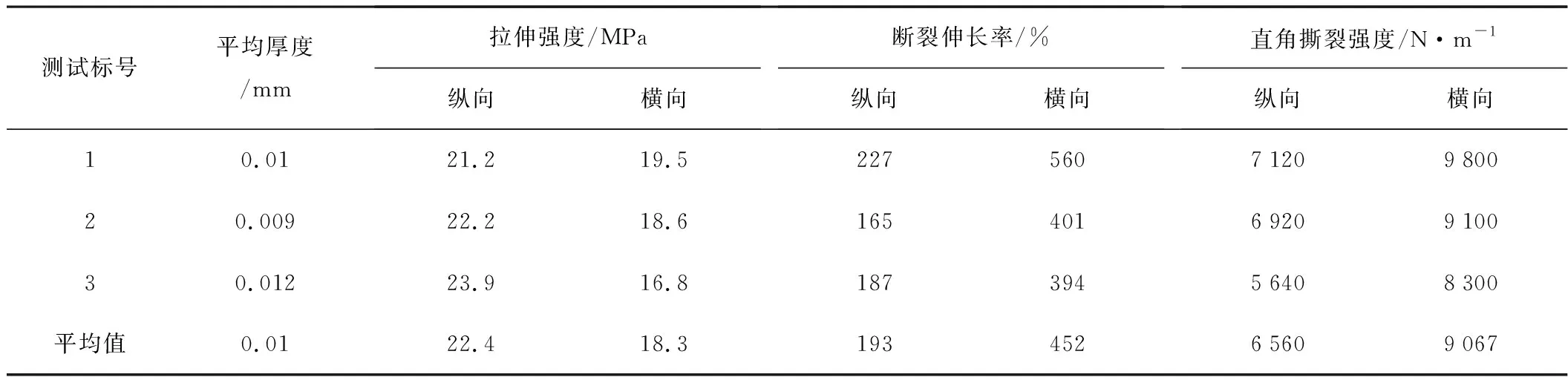
表1 地膜的机械性能Table 1 The mechanical properties of the membrane
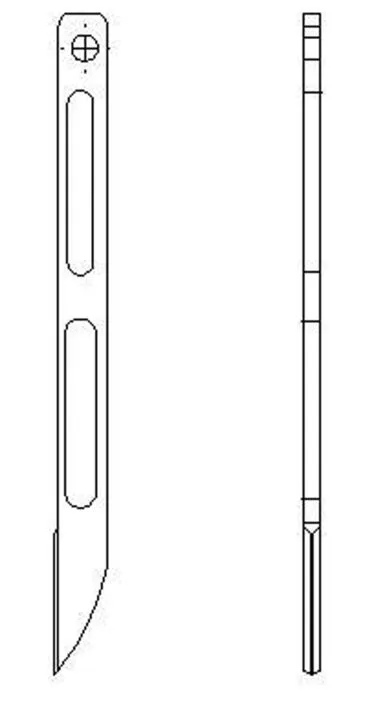
图3 扎孔刀设计图Fig.3 The prick hole's knife design
3 扎孔刀的运动分析
3.1 运动分析
扎孔刀运动过程(见图4)直接影响扎孔装置的扎孔效果。本文采用Autocad软件[14-16]对扎孔刀进行运动分析与计算。
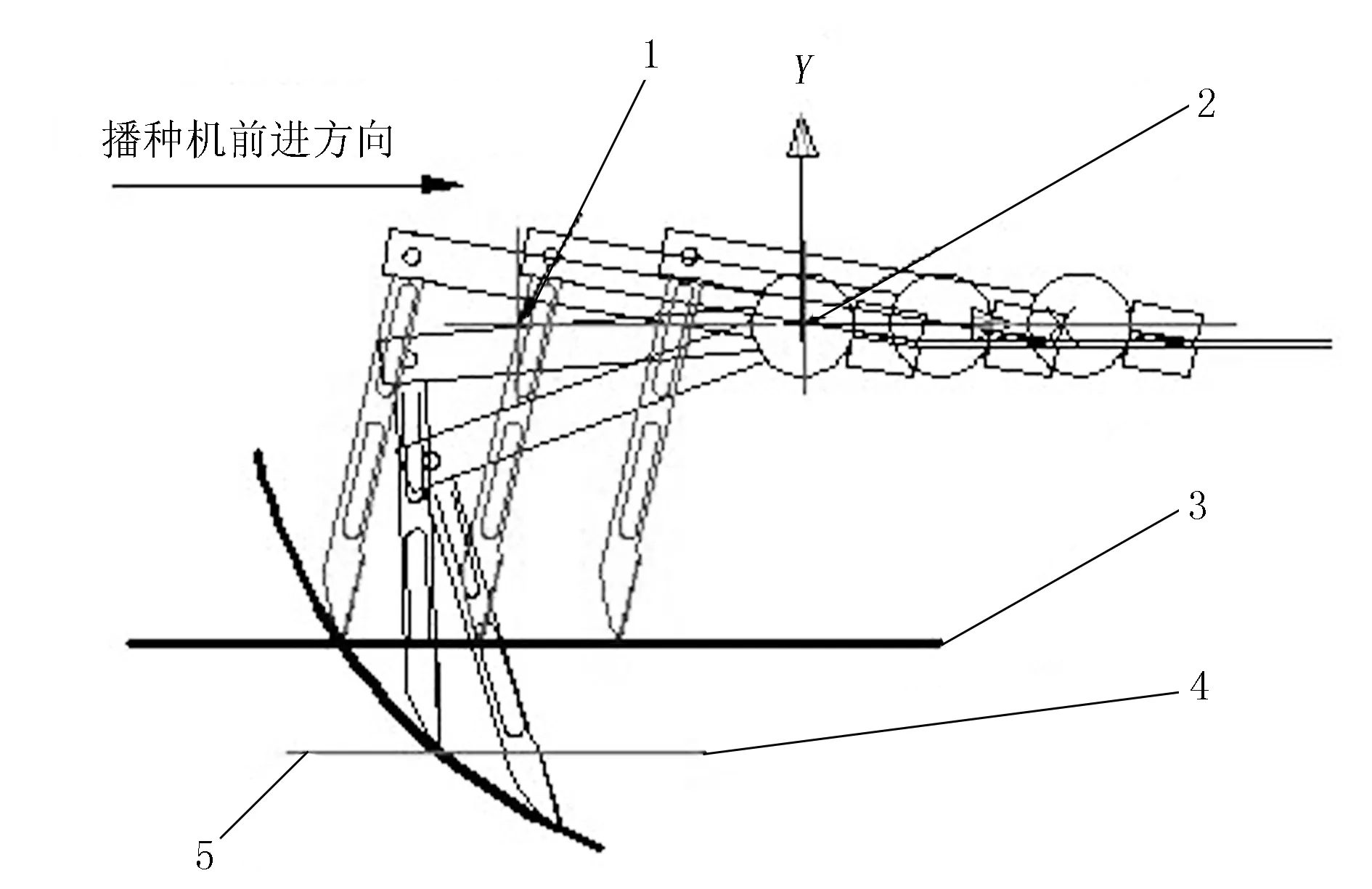
1.参考坐标系原点 2.坐标系原点 3.直线运动 4.圆周运动 5.地膜
选取刀尖处某点作为研究参照。扎孔刀工作时的绝对运动为绕杠杆轴中心的圆周运动和播种机不断前进时具有的直线运动的合成[17-20]。
扎孔刀的运动可以分为下刀过程、划膜过程及恢复过程。下刀过程选取刀尖与地膜接触前后两段位移做运动研究分析;划膜过程中,扎孔刀只做直线运动不做圆周运动;恢复过程与下刀过程做相反的圆周运动、相同的直线运动。
3.2 运动轨迹计算
3.2.1 下刀过程
用图4中杠杆轴回转中心(2处)作为坐标原点,播种机前进方向作为X轴,垂直向上作为Y轴建立坐标系分析扎孔刀下刀过程,选取6个点作为参考点。若扎孔刀只做圆周运动,则6个点沿逆时针方向的坐标如表2所示。
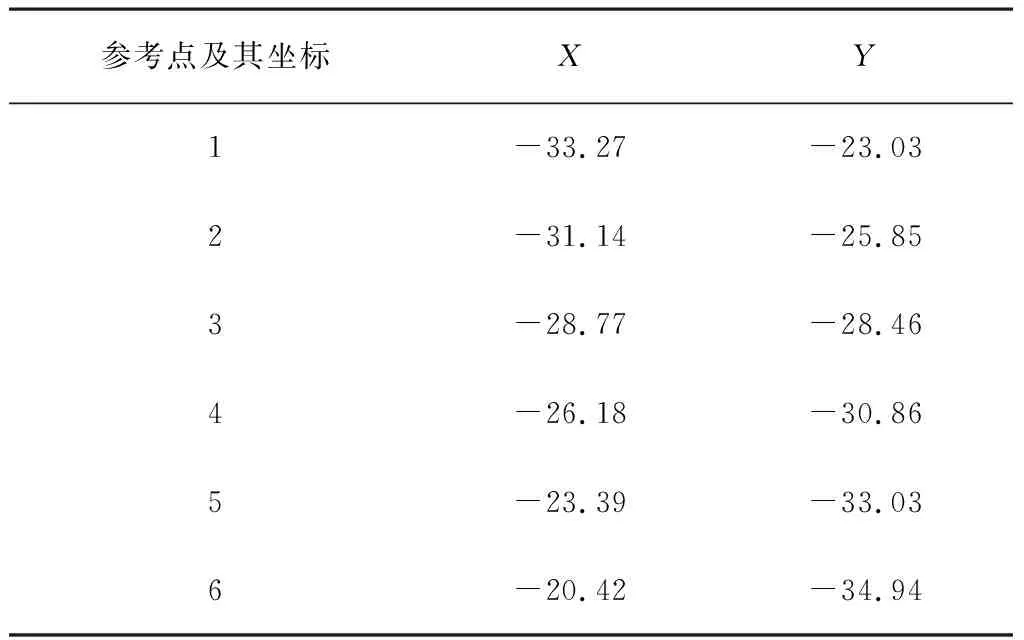
表2 下刀过程参考点圆周运动轨迹坐标Table 2 Reference point lower knife process circular motion trajectory coordinates mm
扎孔刀的下刀过程是一个圆周运动与直线运动复合的过程,即6个参考点的实际纵坐标不变,实际横坐标增大,如表3所示。
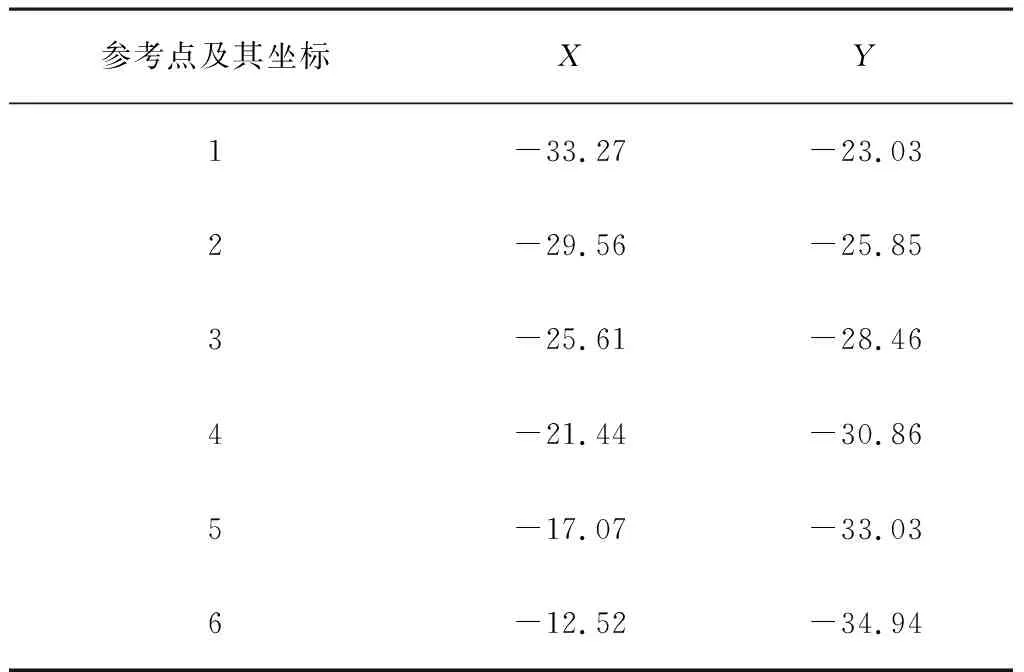
表3 下刀过程参考点实际运动轨迹坐标Table 3 Reference point lower knife process actual motion trajectory coordinates mm
3.2.2 划膜过程
扎孔刀在划膜过程中只做沿播种机前进方向的直线运动。根据实际要求,选用与下刀过程相同的坐标系做分析。选取8个点作为参考点,其坐标如表4所示。

表4 划膜过程参考点实际运动轨迹坐标Table 4 Reference point laceration mulch process actual motion trajectory coordinates mm
3.2.3 恢复过程
扎孔刀恢复过程是一个圆周与直线相复合的运动过程。在研究扎孔刀恢复过程时,选用图4中1处作为坐标原点,播种机前进方向作为X轴,垂直向上作为Y轴建立参考坐标系,选取6个点作为参考点。其未加直线运动的坐标如表5所示,实际坐标如表6所示。
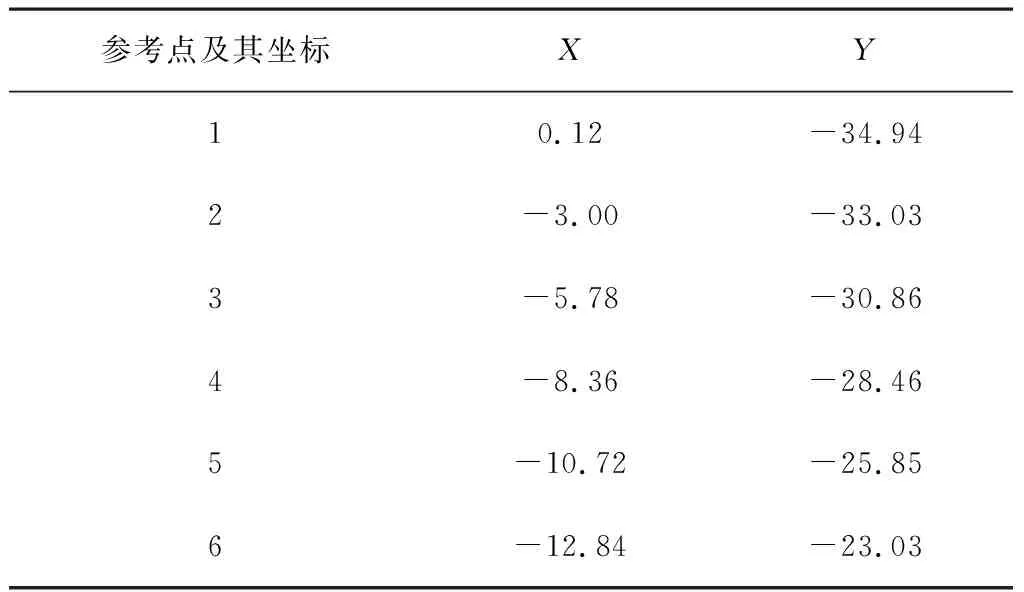
表5 恢复过程参考点圆周运动轨迹坐标Table 5 Reference point recover process circular motion trajectory coordinates mm
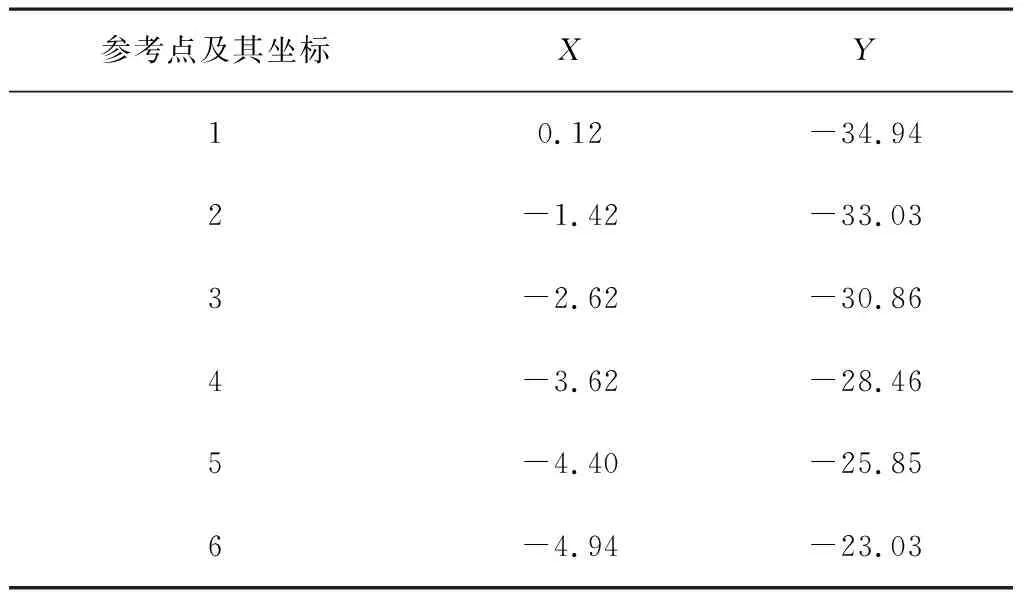
表6 恢复过程参考点实际运动轨迹坐标Table 6 Reference point recover process actual motion trajectory coordinates mm
3.3 运动分析
通过Autocad对3个过程中参考点的实际轨迹坐标值分析完成之后,将这些参考点实际坐标值绘制轨迹图做运动分析[21-23],如图5所示。
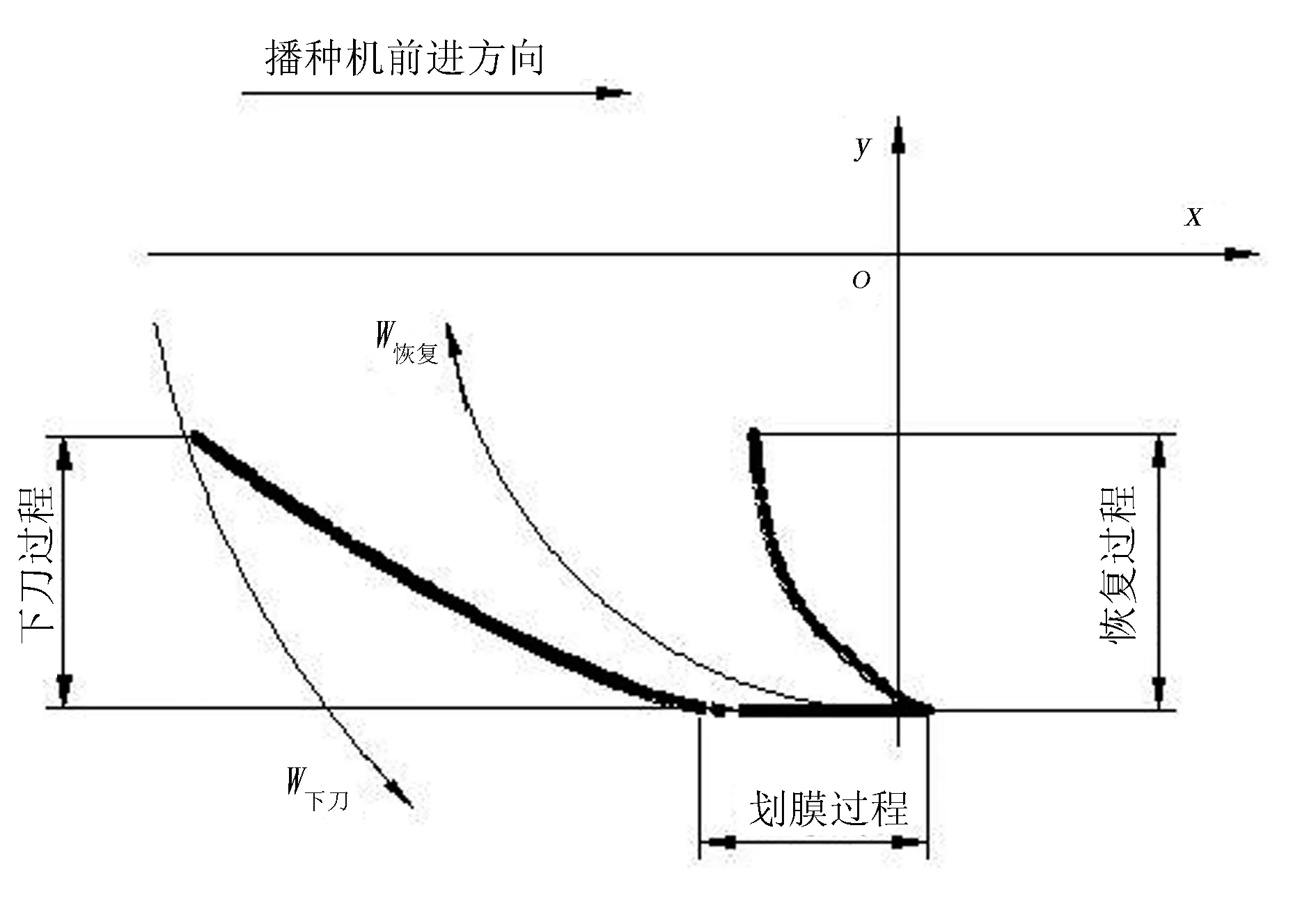
图5 刀尖点相对地面运动轨迹图Fig.5 Tool tip relative to ground motion trajectory
轨迹图结果分析:扎孔装置扎孔刀下刀过程和恢复过程的运动轨迹为摆线,播种机前进速度影响摆线的形状。划膜过程中,划口长短与播种机前进速度及刀尖保持时间有关。相同的划口长度要求下,机组前进速度越快,则刀尖最下端保持时间越短; 恢复过程中,扎孔刀从划口处恢复到初始位置;整个过程不会发生挂膜现象。
4 田间试验与结果
4.1 试验基本条件
田间试验在内蒙古呼和浩特市内蒙古农业大学机械厂进行。试验设备包括2CM-4型马铃薯微垄覆膜侧播机、扎孔装置、约翰迪尔904拖拉机、ACERe471G笔记本1台、光电传感器、光电编码器、Dunlop RP8242电源、扎孔刀等。
4.2 试验结果
装有该扎孔刀的扎孔装置田间试验扎孔效果图如图6所示。
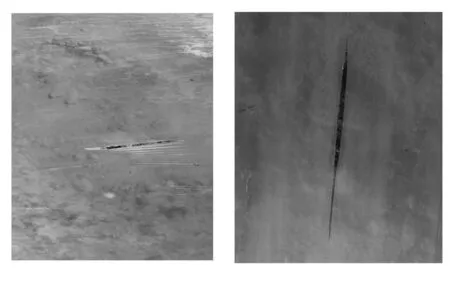
图6 扎孔刀扎孔效果图Fig.6 The prick hole's knife prick rendering drawing
试验结果表明:扎孔刀下刀过程中能将膜扎破;受地膜拉伸强度影响,实际进入划膜过程的时间略晚于理论分析时间,导致划口长度偏短,划口的宽度与扎孔刀厚度相同;在3个过程中,均未出现挂膜现象。
5 结论
1)试验结果与运动分析结果一致。扎孔刀在下刀、划膜、恢复3个过程中均无挂膜现象发生。
2)下刀过程和恢复过程的运动轨迹受播种机前进速度影响;划膜过程中划口长度与播种机前进速度、刀尖最下端保持时间的综合作用有关,前进速度越快,则刀尖最下端保持时间越短。
猜你喜欢
CHINA TODAY(2022年4期)2022-11-22
农业技术与装备(2021年3期)2021-12-01
小哥白尼(野生动物)(2021年5期)2021-08-30
湖北农机化(2020年22期)2021-01-18
今日农业(2020年22期)2020-12-14
好日子(下旬)(2020年6期)2020-08-04
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
消费导刊(2019年3期)2019-01-28
自动化学报(2017年2期)2017-04-04