
玉米精量播种智能控制系统研制
2018-08-10 10:58杨腾祥金诚谦
农机化研究 2018年9期
印 祥,杨腾祥,金诚谦,杜 娟
(山东理工大学 农业工程与食品科学学院,山东 淄博 255000)
0 引言
随着精准农业和智慧农业等概念的提出和实施,农业生产要求在减少农业生产资料投入的同时提高产出[1]。其中,播种作业是影响投入产出比的关键环节之一,而玉米播种作业要求每穴一粒、粒距均匀一致[2-5]。目前,玉米播种机大都采用地轮驱动排种器的方式,通过改变其机械传动机构的传动比以调节播种粒距[6-8]。而由于田间地面起伏不平、地轮打滑等因素,导致播种粒距随机变化,很大程度上影响玉米产量[9-11]。此外,机械传动机构的传动比为固定值,不能实现播种粒距的在线无级调节。
本文针对现有玉米播种机存在的问题,基于机电一体化控制技术,研制了基于调速电机驱动的玉米精量播种智能控制系统。
1 系统构成
以市场上现有的四行玉米免耕精量播种机为平台,结合当前国内外精量播种控制系统的研究现状,研制了如图1所示的玉米精量播种智能控制系统。其主要包括可调速直流电机、人机交互界面、测速地轮、光电编码器,以及电子控制单元(ECU)等。ECU根据测速地轮转速实时计算播种机行驶速度,并根据行驶速度对直流电机进行调速以驱动排种器完成排种作业。人机交互终端用以设置播种机基本作业参数,主要包括测速地轮直径、播种粒距和排种器型孔数,同时用以实时显示系统工作状态。

图1 玉米精量播种智能控制系统构成
2 硬件系统设计
2.1 ECU电路设计
ECU作为玉米精量播种智能控制系统的核心,用以接收两路编码器的脉冲信号、控制直流电机转速及与人机交互终端进行实时通信。根据上述系统功能要求,本研究选用了PIC18F458单片机为中央处理器,外围电路主要包括时钟电路、1个串口驱动芯片MAX232、2个脉冲计数器CD4040、1个D/A转换芯片MAX518等。ECU电路原理框图如图2所示。

图2 ECU电路原理框图
2.2 地轮测速
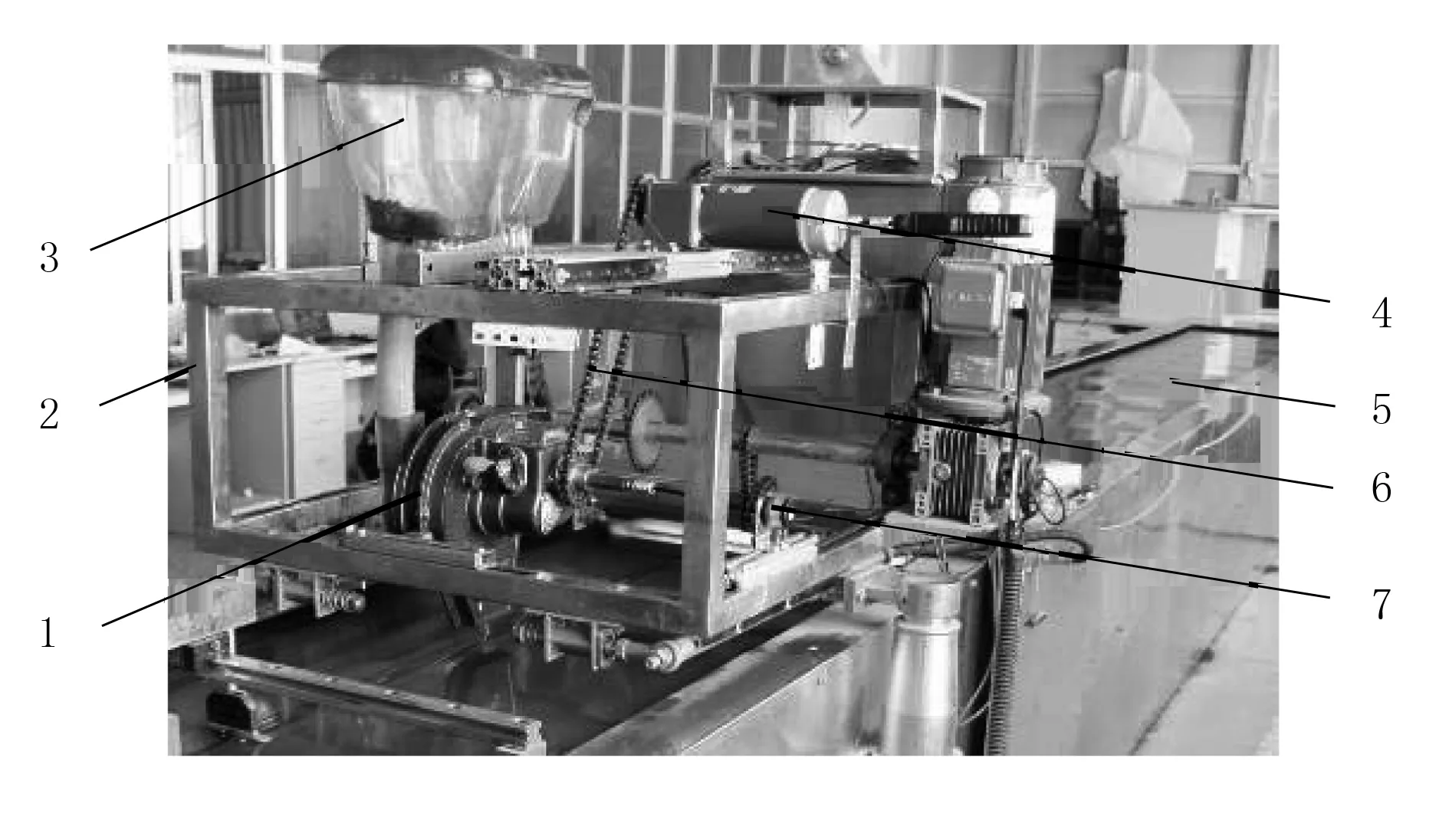
与驱动地轮不同,本研究中所采用的地轮仅用于播种机行驶速度测量,打滑率相对较小。如图3所示:采用600线光电编码器1,其输入轴与测速地轮联接,由ECU实时计算播种机前进速度(m/s),即
(1)
其中,D为测速地轮直径;△T为间隔时间;P为△T时间内的脉冲数量;N为编码器线数。
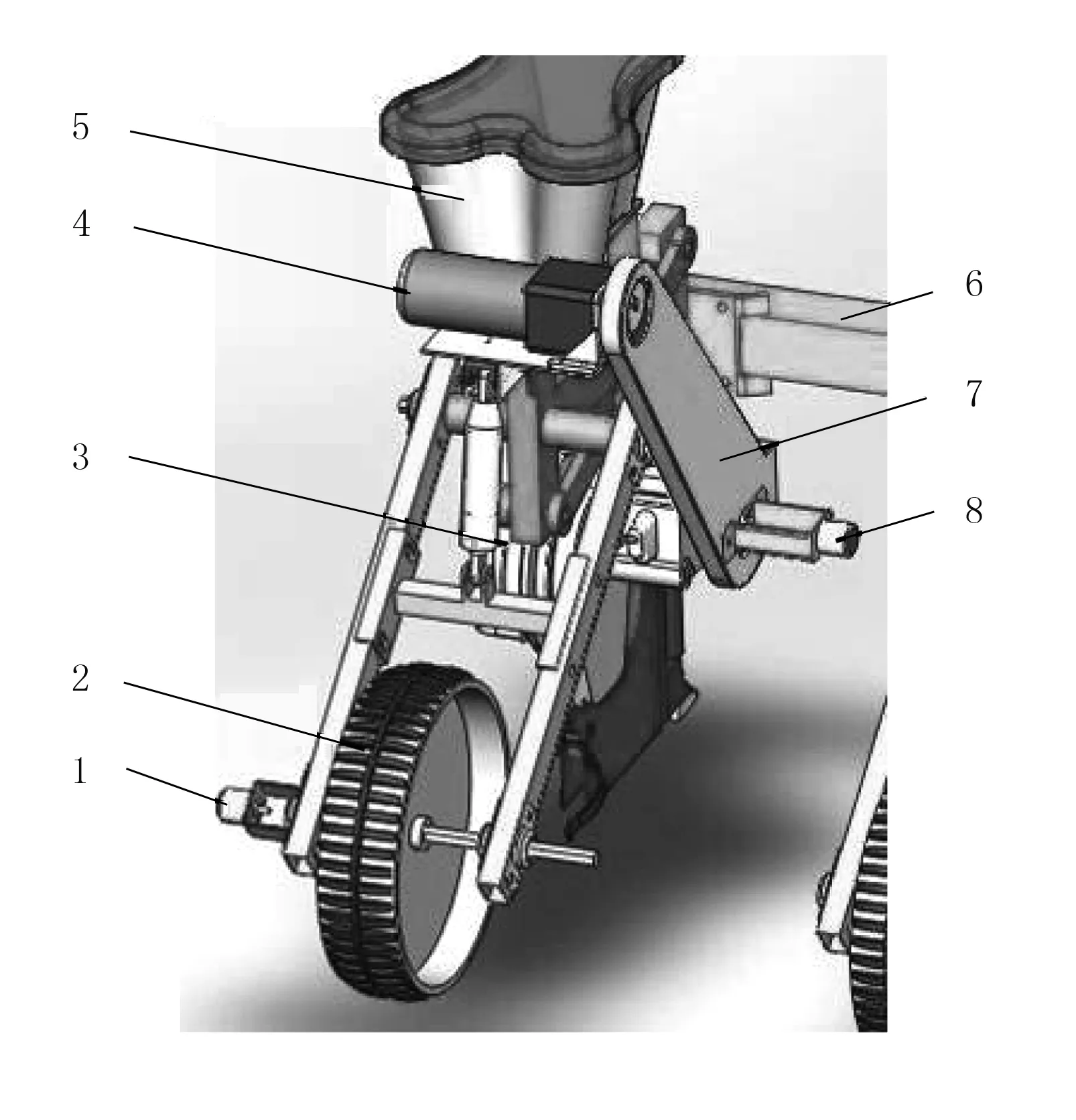
1.编码器 2.测速地轮 3.排种器 4.减速电机 5.种箱 6.机架 7.链传动 8.编码器
2.3 排种器转速控制
在播种机前进速度恒定的条件下,排种器的转速直接决定了入土种子的数量。如图3所示:直流减速电机为24V、300W,最高转速为100r/min,其输出动力经过链条链轮传动机构传递至排种器。排种器目标转速由ECU实时计算,其公式为
(2)
其中,dD为设定播种间距;M为排种盘型孔数量。
编码器与排种器旋转轴联接,用以测量排种器实际转速SA,ECU根据SA和SD,基于比例微分算法实时调整驱动器的输入电压值VD以控制电机转速,保证播种粒距均匀一致。VD计算公式为
(3)
(4)

2.4 软件设计
根据精量播种的基本作业要求,所开发的ECU工作流程如图4所示。系统初始化后,首先读取作业参数,然后读取播种机前进速度V后计算SD,读取SA后计算VD,最后利用人机交互终端显示实时作业状态。
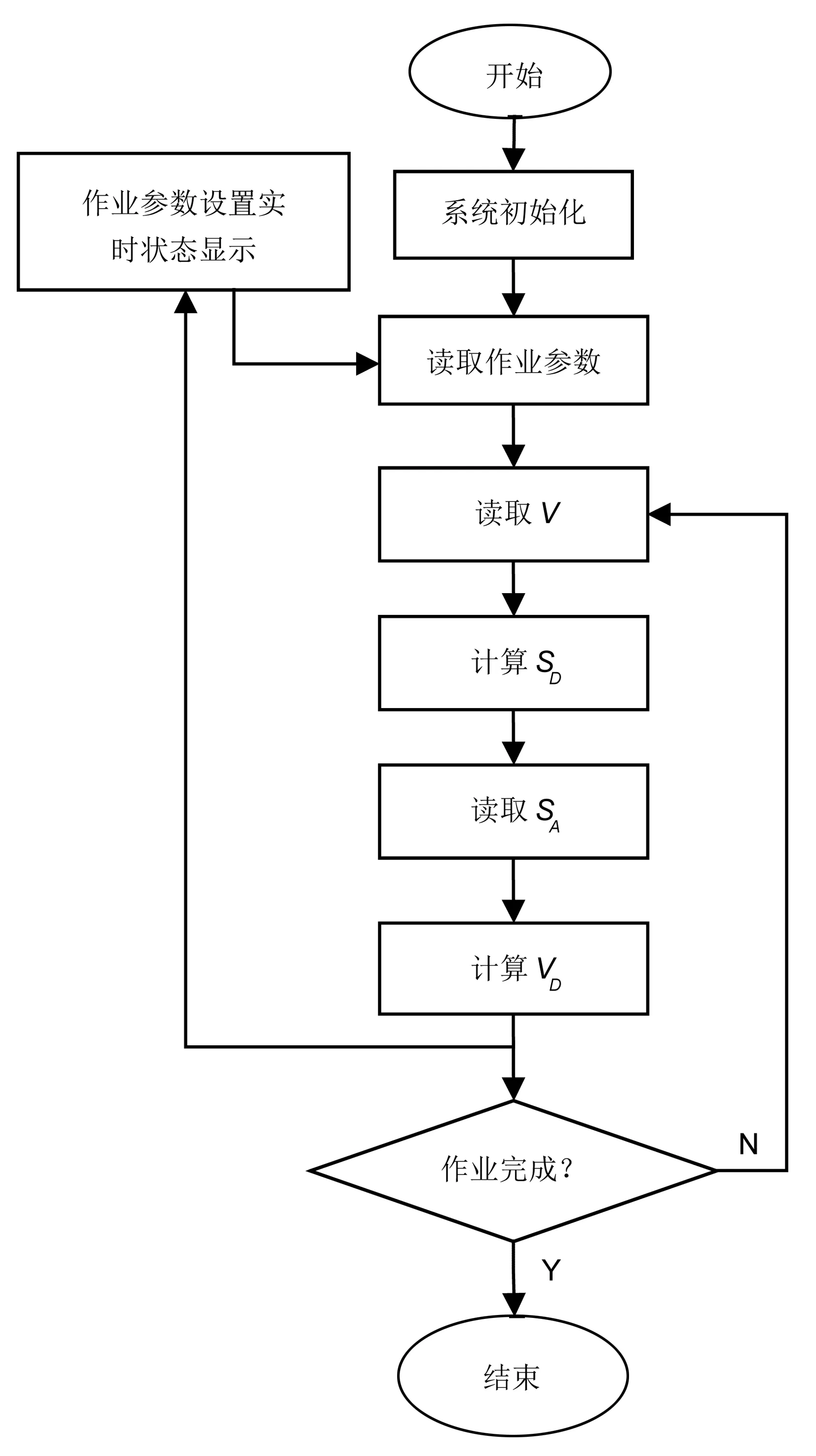
图4 ECU工作流程图
根据图4所示工作流程,本研究在基于C语言的PIC单片机编程环境下完成了ECU软件编写,利用PICkit3编程器进行了程序下载和测试。
2.5 人机交互终端设计
为便于系统操作和状态显示,本研究采用串口HMI触摸屏作为人机交互终端,触摸屏通过RS232串口与ECU进行通信。根据精量播种机智能控制系统操作要求,需要设置的基本参数包括排种盘型孔数量M、地轮直径D、编码器线数N、播种粒距dD,需要实时显示的作业状态参数包括播种机前进速度V、排种器目标转速SD、排种器实际转速SA及实际粒距dA。
利用串口HMI触摸屏的开发环境,完成了基本参数设置界面和作业参数实时显示界面的设计和制作,如图5所示。
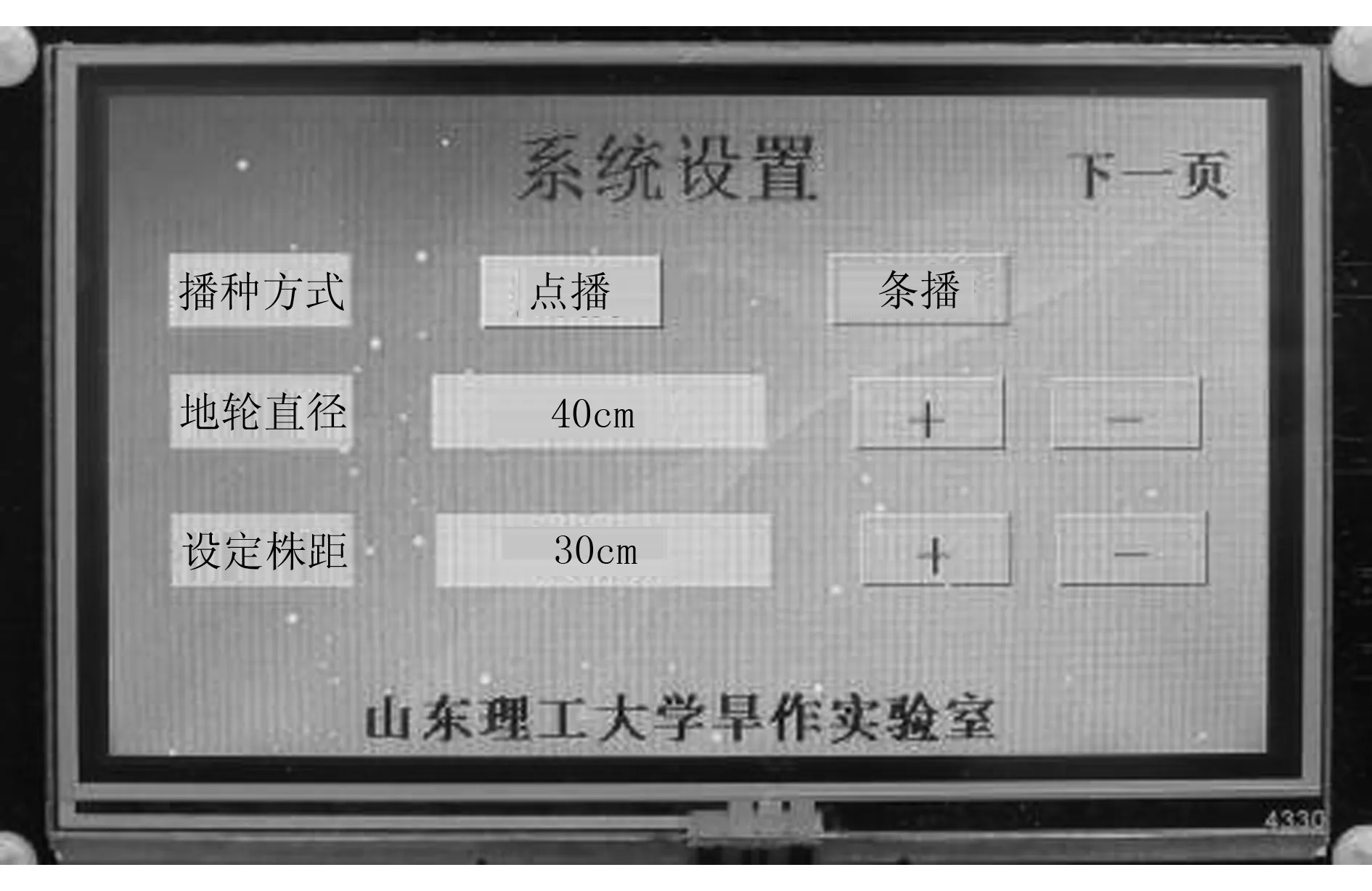
(a) 参数设置界面
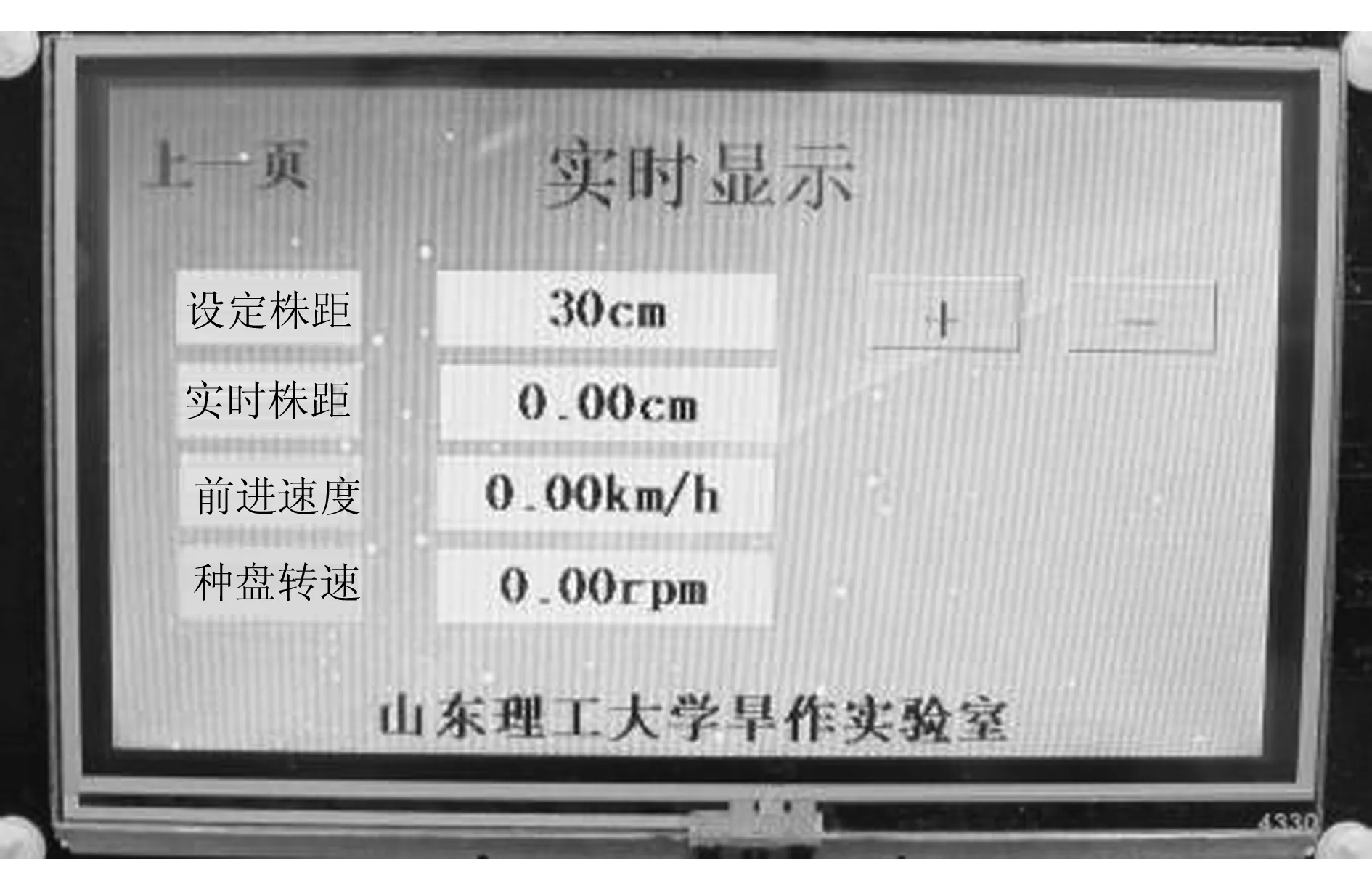
(b) 实时显示界面
3 测试试验与数据分析
为了评价该精量播种智能控制系统的工作性能,将其用于指夹式排种器上,排种盘的指夹数量为12。如图6所示:将此装置安装于排种试验台上,以验证其在不同前进速度、不同播种粒距时排种的可靠性和准确性,试验安排如下:
1)试验时间。2017年3月21-25日。
2)试验地点。山东理工大学农机性能实验室。
3)试验平台。计算机视觉排种器试验台,黑龙江省农业机械工程科学研究院研制,如图6所示。
4)试验对象。所研制的玉米精量播种智能控制系统。
试验过程中,通过改变输送带行走速度的方式模拟播种机的不同前进速度。考虑到所使用的指夹式排种器的推荐作业速度为5.0km/h,试验中拟设定的前进速度为3.0、4.0、5.0、6.0、7.0km/h,在同一前进速度下所设定的播种粒距分别为30、35、40cm。系统运行过程中,ECU通过RS232串口将前进速度V、目标转速SD、实际转速SA等计算数据实时发送计算机。如图7所示,实际播种粒距dA由人工进行测量,同一前进和同一设定粒距下的试验重复3次,忽略重播、漏播等因素的影响。
1.指夹式排种器 2.安装支架 3.种箱 4.减速电机
图7 粒距测量

由表1可以看出:播种间距实际平均值与目标间距的差值均小于2cm,播种间距误差的最大值为12cm,其均方根误差的最大值为0.84cm。在前进速度5.05km/h时,即排种器转速在20r/min左右时,播种间距的均方根误差和最大误差均较小,符合所使用的指夹式排种器的推荐播种速度。上述试验数据表明:本研究所开发的玉米精量播种控制系统能够根据播种机前进速度实时控制排种器转速,以满足播种粒距一致的要求。

表1 试验数据与分析
4 结论
1)研制了玉米精量播种智能控制系统,能够根据播种机前进速度实时控制排种器转速以保证播种粒距一致。
2)该系统采用直流减速电机驱动排种器,机械结构简单,可以在现有玉米播种机的基础上进行快速改造,从而满足玉米精量播种的要求。
3)该系统采用串口屏作为人机交互界面,能够在线设置系统作业参数,可适用于不同作业参数的玉米播种机。
4)试验表明:该系统操作简单,在机器基本参数一定的情况下只需输入播种间距,ECU即可自动控制排种器转速,不同前进速度下播种间距的平均误差小于2cm。
猜你喜欢
中国农业文摘-农业工程(2022年5期)2022-11-23
农业工程学报(2022年6期)2022-06-27
新疆农机化(2022年1期)2022-03-02
农机质量与监督(2021年9期)2021-12-27
农业技术与装备(2021年3期)2021-12-01
农机科技推广(2021年3期)2021-08-02
今日农业(2020年22期)2020-12-14
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
农家顾问(2014年6期)2014-06-30
