手持便携式苹果采摘装置设计
2018-08-15 02:17周建华李向国李育鑫徐铭泽
现代制造技术与装备 2018年7期
周建华 李向国 李育鑫 徐铭泽
(河海大学 机电工程学院,常州213022)
苹果是世界性果品,由于其生态适应性较强,果品营养价值高,耐贮性好,供应周期长,世界上很多的国家都将其列为主要消费果品而大力推荐[1]。据联合国粮农组织统计,2012年全球苹果收获面积为484.3万hm2,比2011年增加1.3%;产量为7637.9万t,比2011年提高0.3%[2]。我国是苹果栽培面积最大和产量最高的国家,分别占世界总面积和总产量的42.5%和48.4%[3]。根据国家统计局的资料,2002年我国苹果产量为1924万t(FAO数据为2050万t),其中富士1404万t,国光145万t,苹果产量占全国水果产量的27%,远远高于世界平均比例[4]。
随着我国苹果种植技术的提高,我国苹果产量呈上升趋势[5]。国民对水果旺盛的需求为果园种植业创造了巨大的市场,果园种植业具有广阔的发展前景。与此同时,水果采摘季节性强,费用高且劳动量大,传统人工采摘的方式易造成果实损伤,同时采摘不及时将会导致经济损失[6]。苹果采摘作业质量的好坏会对产品的后续加工和储存产生直接的影响,从而最终影响市场价格和经济效益[7]。为了节约人力、物力,提高果农的经济效益,研究采摘机械,对于降低人工劳动强度和采摘成本、保证水果及时采收具有重大的意义[8]。
水果采摘分为机械式采摘和机器人智能化采摘,果园的机械式采摘主要有撞击式、切割式和振摇式三种类型[9]。振摇式和撞击式是根据产生振动形式的不同而划分的,目前国外用得最多的是振摇式采收机,如图1所示[10]。而我国南方果园大部分处于丘陵地带,由于工作环境的复杂性,目前采收机的智能化水平达不到农业生产的要求。同时,我国果园主要是分散栽培、分户管理的小农经济性的种植方式,生产规模小,农民的技术素质偏低,大型机械式采收机成本过高,在此种种植形式下难以适用。而目前传统的切割式由于刀片裸露在外面,往往容易在采摘过程中损伤果实,如图2所示。从农业机器人研究可以看出,农业机器人可以代替人类完成某些农业生产活动,但要达到实用普及的程度,还有一些问题需要解决[11]。通过分析以上原因,笔者提出一种便携式水果采摘装置设计,它采用切割式原理,人可以手持操作进行采摘,同时切割刀片在采摘过程中不会损伤果实,从而达到保护果实、操作轻便以及提高采摘效率等目的。

图1 振摇式大型采收机

图2 切割式采摘器
1 设计目标与实现方案
1.1 设计目标
本研究旨在设计一种手持便携式苹果采摘装置。所设计的采摘装置要能够适应复杂的采摘环境,具有操作简单、质量轻、保护果实和手持方便的特点。
1.2 实现方案描述
首先将苹果套入采摘套筒中。然后,按动手柄并通过连接的拉绳带动刀刃进行剪切,将果实根茎剪断,使其落入收集套筒中。最后,剪刀通过扭簧恢复原位等待下一次剪切。
采摘套筒采用罐式结构,因为在采摘过程中,爪式或切割式采摘手易损伤苹果表皮,导致采摘质量下降,而罐式结构可以内含剪刀,不易破坏水果果皮,且在采摘过程中不易造成果实掉落。采摘套筒与杆之间通过拉簧能够进行小幅的角度调整,使剪切装置始终处于水平状态,以便更好地进行剪切动作,使采摘手能够适应复杂的采摘环境。收集套筒通过设置特殊形状的槽口使其易于拆卸,方便取出果实。
2 详细设计与制作描述
2.1 总体结构
苹果采摘装置如图3所示,包括采摘套筒和采摘杆两部分,其分别如图4、图5所示。采摘套筒部分包括套筒、剪切装置和收集装置。采摘杆部分包括伸缩杆、手柄和调整装置。具体结构如图6、图7所示,包括手柄、伸缩杆、扭簧、固定刀片、旋转刀片、拉绳、采摘套筒和收集套筒。剪切装置、收集装置和调整装置将在下文中展开详细介绍。

图3 苹果采摘装置立体图

图4 采摘套筒部 分立体图

图5 采摘杆 部分立体图

图6 采摘装置左视图

图7 套筒上部空间后视图
采摘前剪刀与伸缩杆处于原位。采摘时,操作者将苹果套入采摘套筒中,通过调整机构在障碍物的作用下使套筒角度调整,使果实根茎位于剪刀中间。按动手柄使拉绳带动剪刀运动,将根茎剪断。苹果在重力作用下落入收集套筒。然后,剪刀在扭簧作用下恢复原位,套筒在拉簧作用下恢复原位,完成采摘工作,等待下一次剪切。手柄与剪刀通过拉绳连接,拉绳借用刹车线原理,使伸缩杆在伸缩过程中不需要调整就可以直接进行采摘工作。此外,还可以将收集套筒底部去除,连上输送管道,可以连接收集箱,一次采摘多果,提高采摘效率。
2.2 工作原理
2.2.1 剪切装置
剪切装置如图8所示,由旋转刀片、固定刀片和扭簧组成。旋转刀片如图9所示,固定刀片如图10所示。
拉绳一端通过螺栓螺母固定在旋转刀片孔一内,旋转刀片孔三与固定刀片孔四、套筒通过螺栓连接,螺栓起到旋转轴的作用;固定刀片通过孔五、孔六,以螺栓连接的方式固定在套筒上。扭簧套在螺栓上,一段卡在固定刀片上,另一端通过孔二卡在旋转刀片上,使得扭簧能够在旋转刀片动作时产生扭力,从而使刀片在完成剪切动作后能够恢复原始的刀刃张开状态[12-13]。
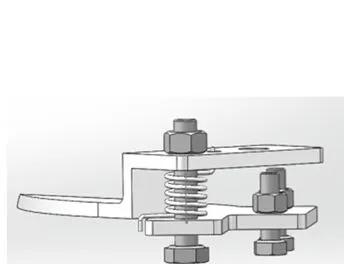
图8 剪切装置立体图

图9 旋转刀片立体图
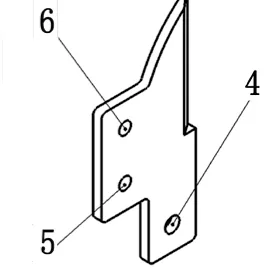
图10 固定刀片立体图
2.2.2 收集装置
收集装置由采摘套筒和收集套筒组成。采摘套筒装置如图11所示,收集套筒如图12所示。采摘套筒高度为169mm,内径为120mm,分为上、中、下三部分,上部分是容纳剪切装置的空间,中间部分是采摘空间,采摘时将苹果套入中间部分,下部分是连接部分,即套筒通过四个凸起与收集套筒连接,易于拆卸。人们可根据需求在套筒底部接上不同容量的收集套筒,即增长收集套筒长度,或将收集套筒底部去除,套上布兜或输送管道,实现一次采摘多果,提高采摘效率。

图11 采摘套筒立体图

图12 收集套筒立体图
2.2.3 调整装置
调整装置由连接件、拉簧和伸缩杆组成。连接件如图13所示,套筒与杆连接图如图14所示。

图13 连接件立体图
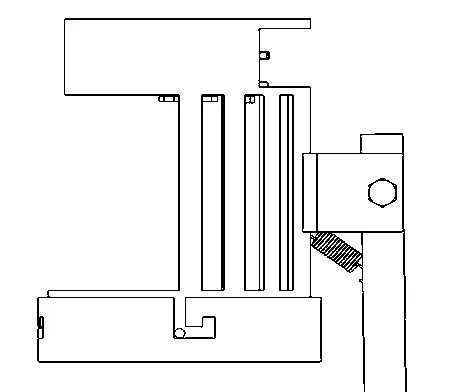
图14 套筒与杆左视图
连接件通过孔七、孔九与采摘套筒以螺栓方式连接,伸缩杆通过孔八、孔十以螺栓方式与连接件连接,拉簧一端通过挂钩钩在采摘套筒的孔里,另一端通过挂钩钩在伸缩杆的孔里,使伸缩杆与连接件之间能够进行小幅的角度调整,使剪切装置始终处于水平状态,以便更好地进行剪切动作。另外,在每次采摘动作完成后,伸缩杆在拉簧作用下复位,使其能够适应复杂的采摘环境。
2.3 主要部件设计
采摘装置在设计时应考虑质量轻、强度高,对水果没有碰撞损伤,且方便拆卸更换。
基于上述考虑,套筒设计为内径120mm圆筒形,材料选用为塑料。中间镂空的设计可以减轻整个装置的自重,易于手持。套筒与伸缩杆、剪刀等连接采用可拆卸连接,方便更换。
剪切装置开始采用滑块剪刀,但在实际操作过程中发现两刀片同时运动,会由于与连接杆件的摩擦阻力过大而难以运动。故采用一片固定、另一片旋转的方式来完成剪切动作。一方面降低了阻力,另一方面减小了剪切装置的整体体积,使得采摘套筒更为小巧。
调整装置利用拉簧的拉力,使伸缩杆与连接件之间能够进行小幅的角度调整,并且在每次采摘动作完成后,伸缩杆在拉簧作用下复位,更加适应复杂的采摘环境。
伸缩杆承受水果质量,需具有高强度和硬度,还要轻盈,便于手握省力。因此,支撑杆材料选用质量小且强度高的不锈钢,直径20mm,长度为0.92~1.42m,最大采摘高度为3m。总体重量为1.15kg,人手持较为轻便。手柄使得人采摘更为省力。
3 结论
本装置设计旨在实现苹果采摘机械化功能,具有操作简单、质量轻、采摘过程中保护果实等优点。通过创新设计,装置具有如下特点:采摘手采用罐式结构,使剪刀内含,并将剪刀与采摘空间隔离开来,保护水果;在采摘套筒与伸缩杆之间加入拉簧,使其可以进行小幅的角度调整,避开树枝等障碍物,能够适应复杂的采摘环境。收集套筒模块化可更换,可根据需求在套筒底部接上不同容量的收集套筒,适应不同环境。收集套筒通过特殊形状的槽口实现可拆卸化,便于拆装,能很方便取出果实。本装置适合南方小型种植园,成本低,人手持操作,从而实现提高采摘效率、现摘鲜卖等目的。
猜你喜欢
结构工程师(2022年2期)2022-07-15
小学科学(2022年3期)2022-04-01
商业2.0-市场与监管(2021年6期)2021-09-10
读者(2019年22期)2019-10-31
新教育论坛(2019年30期)2019-09-10
制造技术与机床(2017年10期)2017-11-28
凿岩机械气动工具(2017年3期)2017-11-22
汽车文摘(2016年6期)2016-12-07
铁道科学与工程学报(2015年4期)2015-12-24
有色金属加工(2015年4期)2015-09-19