
一种地球静止轨道空间碎片主动清除方式
2018-08-21 02:57张治彬李新洪安继萍贺广松王谦
现代电子技术 2018年16期
张治彬 李新洪 安继萍 贺广松 王谦

摘 要: 首先讨论国内外对空间碎片主动清除技术的研究进展,分析空间碎片清除平台的功能要求。然后提出一种静止轨道空间碎片主动清除方式,即通过空间碎片清除平台发射出粘性弹丸与目标空间碎片进行非弹性碰撞,使空间碎片获得一定的速度增量,进而被推离原轨道。其次,对粘性弹丸的轨道转移过程进行建模,推导出拦截时间、弹丸飞行距离等要素与姿态俯仰角的关系。最后,利用Simulink对弹丸的轨道转移过程进行了仿真,分析拦截时间t,飞行轨迹长度S与弹丸俯仰角(弹丸出射速度与碎片清除平台速度的夹角)的关系。
关键词: 空间碎片; 主动清除技术; 地球静止轨道; 粘性弹丸; 碎片拦截; Simulink
中图分类号: TN927?34 文献标识码: A 文章编号: 1004?373X(2018)16?0088?04
Abstract: An active removal method of space debris in the geostationary orbit is proposed after discussing the research progress of active removal technology of space debris at home and abroad, and analyzing the functional requirements of the space debris removal platform. The viscous projectile is launched from the space debris removal platform to make inelastic collision with the debris in target space, so that the space debris can obtain a certain velocity increment and be pushed away from the original orbit. The orbit transfer process of the viscous projectile is modeled, and the relationship of interception time and projectile flight distance to the pitch angle of the attitude is deduced. The orbit transfer process of the projectile is simulated by Simulink. The relationship of the interception time t and flight trajectory length S with the pitch angle of the projectile (the included angle between the ejected velocity of the projectile and the velocity of the debris removal platform) is analyzed.
Keywords: space debris; active removal technology; geostationary orbit; viscous projectile; debris interception; Simulink
0 引 言
静止轨道具有固定的资源,包括轨道资源和频率资源,随着航天技术不断的发展,静止轨道变得越来越拥挤;另一方面,废弃卫星以及碰撞产生等方式产生的空间碎片占据了静止轨道宝贵的资源,并且对静止轨道卫星的寿命造成了严重的威胁,所以对空间碎片的在轨清除也成为航天的重要任务之一。空间碎片的清除技术可以分为被动清除和主动清除[1]。被动清除技术主要是利用地磁场和气动阻力等自然因素,碎片在经过长时间运行之后自然离轨,但是由于静止轨道高度太高,气动力矩以及磁力矩都比较小,被动清除技术对地球静止轨道上的空间碎片并不适用;主动清除技术主要指利用航天器的快速机动能力和可操作性对碎片进行抓捕或者改变轨道,对于静止轨道空间碎片可以抬高其轨道使进入坟墓轨道,从而降低在轨运行航天器损伤风险。各国均对空间碎片清除技术展开研究,文献[2?5]总结了当前主要的清除技术:瑞士提出的清洁太空计划,采用小型机械臂或者形状记忆材料装置对一颗失效卫星Swisscube实施抓捕,进而通过微推力完成离轨;欧盟提出的利用飞网捕获、机械手抓取以及薄膜帆板/发泡装置等;美国提出的电动碎片清除器综合了电动力系绳、飞网捕获等技术[2?5]。我国于2014年在天津首次召开空间碎片移除技术研讨会,对于空间主动清除技术的研究尚处于起步阶段。目前提出的方式目前都还停留在理论阶段,尚未找到一种有效的解决手段,各种捕获方式均存在一定的问题:文献[2]指出采用机械臂可以对大碎片抓取,这种清除方式更适用于失效航天器的离轨,但是由于燃料的限制无法实现长期服务,机械臂抓取过程及后续阻尼运动带来的力学问题还亟待解决;文献[5]指出由于地球静止轨道高度较高,与地面存在通信延时,给清除卫星接近以及捕获碎片增加了难度;文献[6]分析了电动力绳系离轨系统的动力学特性,指出由于系统处于复杂的多场耦合状态,导致姿态不易控制,并且存在细绳发生缠绕的问题;各种清除方式只停留在概念层面,并没有对清除过程做具体的分析。本文在电动力绳系离轨系统以及飞网捕获系统[6?7]的基础上提出一种新的空间碎片清除系统,并着重针对该系统的清除过程进行建模及仿真。
1 黏性弹丸清除平台
1.1 任务分析
空间碎片主动清除航天器除需要静止轨道卫星的一般卫星平台与载荷(通信分系统、热控分系统、电源分系统等)外还需具有如下功能要求:强大的轨道机动能力;攜带足够的燃料达到长期在轨运行;自主在轨运行管理能力,包括任务规划、导航与控制能力;高精度的姿态控制系统;清理碎片过程中不产生新的空间碎片。
目前国外提出的碎片清除航天器均是需要卫星平台与碎片的直接接触或者间接接触。这样无疑给碎片清除航天器的姿态稳定增加了难度。碎片清除需要进行大范围的轨道机动,并且与碎片近距离接触也会增加自身的被撞几率,大大地降低了寿命。
1.2 黏性弹丸清除平台设计
针对上述任务分析过程提出一种黏性弹丸清除平台。该清除系统采用冷气推进与电推进结合的推进方式,载荷为探测跟踪分系统以及可以发射出固定速度黏性弹丸的弹射装置。该黏性弹丸清除平台运行在低于地球静止轨道的圆轨道上,以一定的相对角速度对地球静止轨道上的空间碎片绕飞。在跟踪系统锁定需要清除的空间碎片并确定出碎片相对于清除平台自身的相对位置之后,星载计算机计算出合理的清除时机以及预定撞击位置,然后反馈给姿态控制分系统调整到合适的姿态,最后以固定的速度发射出黏性弹丸。利用黏性弹丸与空间碎片进行碰撞,弹丸会粘附在空间碎片表面从而将空间碎片推离地球静止轨道而不会产生新的碎片。此种空间碎片清除平台的优点在于:由于弹丸的速度和质量相对航天器小得多,并且不需要对清除航天器进行大范围的轨道机动,因此更加节省能量,大大地增加了碎片清除航天器的寿命;由于清除平台轨道高度较低,即使弹丸无法命中目标碎片,也不会产生新的空间碎片;清除平台不需要接近目标碎片,不会增加自身与碎片撞击的风险;该平台可以自主确定目标并对目标碎片实施清除,不需要地面数据支持,所以不存在通信延时。下面对该碎片清除平台的清除模式进行分析与建模,为星载计算机确定合理的清除时机以及预定撞击位置提供参考。
2 清除模式分析与建模
由于地球静止轨道高度比较高,可以近似当作圆轨道进行分析,并且可以忽略大气阻力摄动以及地球非球形摄动等摄动的影响。如图 1所示,黏性弹丸清除平台运行在低于地球静止轨道的圆轨道上,轨道半径为[r1],目标碎片在半径为[r2]的圆轨道上。当清除平台位于[W]处,目标碎片位于[T1]处,即二者的角距离为[θ2]时,调整清除平台姿态俯仰角(即弹丸出射速度与清除平台速度方向夹角)为β,发射出质量为[m],出射速度为[dv]的弹丸,在不考虑摄动的条件下,弹丸的运动轨迹(转移轨道)是二体条件下的圆锥曲线,如图中虚线椭圆所示,P为转移轨道近地点。以地心惯性坐标系为参考系,弹丸运行速度为出射速度[dv]与清除平台运行速度[v1]的合速度[v11]。在预定撞击位置[T2]处,黏性弹丸与目标碎片发生碰撞,此时目标碎片速度为[v2],黏性弹丸速度为[v12],弹丸相对于碎片的速度为[dv′],弹丸经过的飞行时间为[t],飞行路线长度为[S]。由于清除平台轨道高度低于目标碎片,所以清除平台以一定的角速度在目标碎片内侧绕飞,即二者的角距离[θ2]不断变化。对应于不同的[θ2],可以唯一的确定清除平台姿态俯仰角β,即[θ2]与β是一一对应的关系。下面以β为变量,分别确定出预定撞击位置[T2]、飞行时间[t]、飞行路线长度[S],以及发生撞击时弹丸相对于碎片[8?10]的速度[dv′]。
3 基于Simulink的仿真与验证
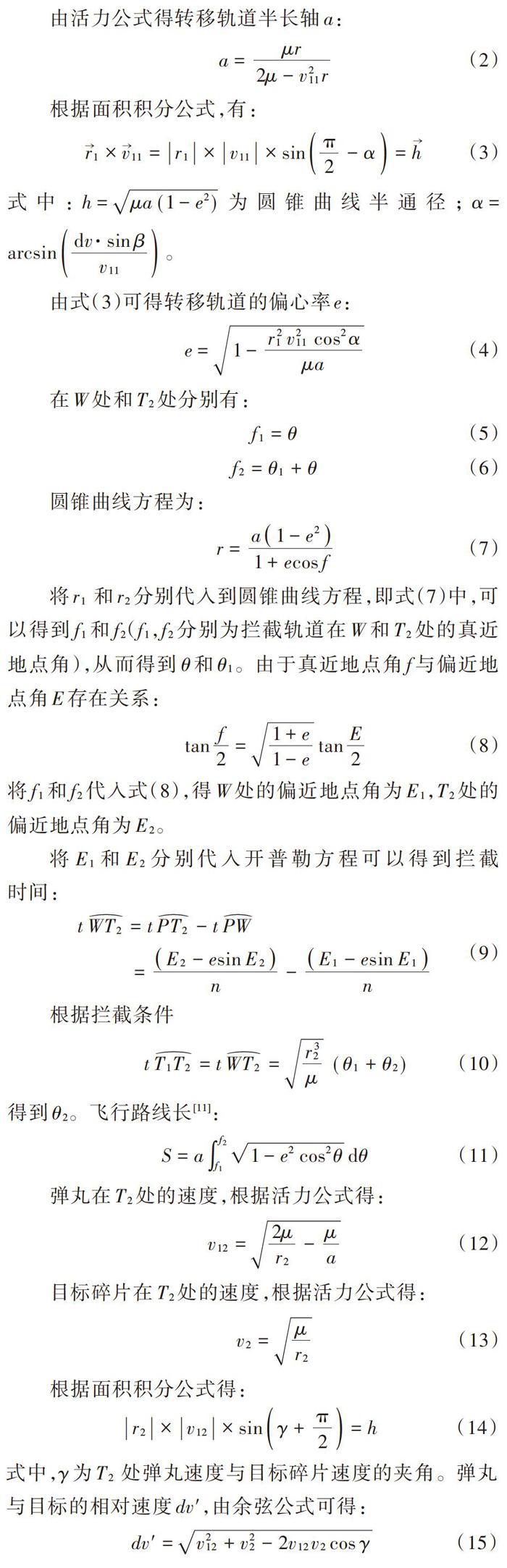
利用Simulink对上述黏性弹丸对空间碎片的清除过程进行了计算与仿真,图2为空间碎片清除Simulink仿真模型。当目标碎片位于地球静止轨道,黏性弹丸清除平台运行在低于地球静止轨道50 km的圆轨道上,二者角距离为5.33×10-6 rad时,弹丸以[π2]的姿态俯仰角出射,出射速度为400 m/s。弹丸沿转移轨道飞行125 s到达预定撞击位置,飞行距离398.67 km,在预定撞击位置,黏性弹丸以0.129 8的角度,399.98 m/s的相对速度击中目标碎片。如果弹丸的质量为10 g,目标碎片质量为100 g,则经过碰撞之后,碎片将获得40 m/s的速度增量。
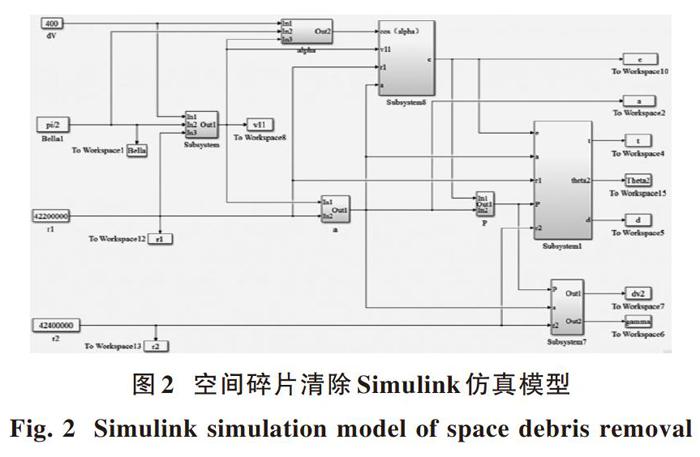
图3是Simulink仿真结果图,图3a)中虚线大椭圆是拦截轨道,图3b)是图3a)中虚线小圆处的局部放大图。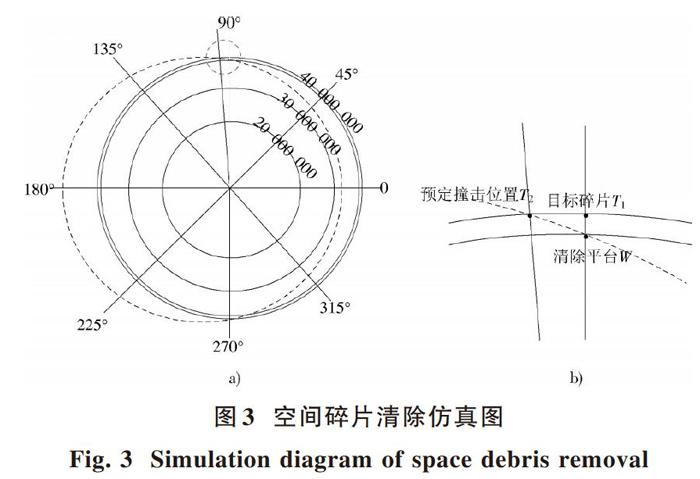
弹丸飞行时间与黏性弹丸空间碎片清除平台的轨道高度有关,轨道高度越低,飞行时间越长,且飞行距离越长;与弹丸出射速度有关,弹丸出射速度越大,飞行时间越短,且飞行距离越短;与平台姿态俯仰角有关,即与目标碎片角距离有关。弹丸飞行时间[t]与β的关系如图4所示,飞行随着偏航角的增加先减小后增加,因此存在极小值。通过对曲线进行五阶的多項式拟合,得到拟合方程:
[y=28.824x5-199.29x4+529.89x3-600.77x2+179.56x+209.19] (16)
经计算,该方程在x=1.552 79处存在极值。由于碎片清除平台与目标碎片的角距离比较小,因此平台姿态俯仰角在接近于[π2]时,弹丸飞行时间存在极小值。
4 结 语
本文提出一种利用黏性弹丸与空间碎片进行非弹性碰撞从而达到空间碎片清除目的的静止轨道空间碎片清除策略,对黏性弹丸进行轨道转移的过程进行建模,并利用Simulink进行仿真。在黏性弹丸空间碎片清除平台轨道高度低于地球静止轨道高度50 km时,弹丸飞行时间在百秒量级,并且飞行时间随着姿态俯仰角的增加先减小后增加,即存在极小值。由于卫星姿态控制精度的不断提高,此空间碎片清除方式的效率也会随之逐渐提高。本文只对弹丸的转移过程进行了建模仿真,下一步将对黏性弹丸与碎片的碰撞过程进行研究。
参考文献
[1] 赵启龙,康志宇,韩亮亮.静止轨道碎片清除飞行器概念研究[J].国际太空,2014(1):48?53.
ZHAO Qilong, KANG Zhiyu, HAN Liangliang. Study on the concept of stationary orbit debris removal aircraft [J]. Space international, 2014(1): 48?53.
[2] 曹喜滨,李峰,张锦绣,等.空间碎片天基主动清除技术发展现状及趋势[J].国防科技大学学报,2015,37(4):117?120.
CAO Xibin, LI Feng, ZHANG Jinxiu, et al. Development status and tendency of active debris removal [J]. Journal of National University of Defense Technology, 2015, 37(4): 117?120.
[3] 龚自正,徐坤博,牟永强,等.空间碎片环境现状与主动移除技术[J].航天器环境工程,2014,31(2):129?135.
GONG Zizheng, XU Kunbo, MU Yongqiang, et al. The space debris environment and the active debris removal techniques [J]. Spacecraft environment engineering, 2014, 31(2): 129?135.
[4] 马楠,贵先洲.国外空间碎片清除计划[J].国际太空,2013(2):64?69.
MA Nan, GUI Xianzhou. Foreign space debris clearance plan [J]. Space international, 2013(2): 64?69.
[5] 李怡勇,王卫杰,李智,等.空间碎片清除[M].北京:国防工业出版社,2014:125?152.
LI Yiyong, WANG Weijie, LI Zhi. Space debris removal [M]. Beijing: National Defense Industry Press, 2014: 125?152.
[6] 孔宪仁,徐大富,廖俊,等.电动力绳系离轨系统中绳索动力学研究[J].上海交通大学学报,2010,44(11):1573?1578.
KONG Xianren, XU Dafu, LIAO Jun, et al. Tether dynamic research of electro?dynamic tether de?orbiting system [J]. Journal of Shanghai Jiao Tong University, 2010, 44(11): 1573?1578.
[7] KASSEBOM M, KOEBEL D, TOBEHN C, et al. ROGER: an advanced solution for a geostationary service satellite [C]// Proceedings of 54th International Astronautical Congress of the International Astronautical Federation. Bremen: International Astronautical Institute of Space Law, 2003: 1?5.
[8] 梁金登,李东旭.空天飞行器轨道拦截策略研究[J].弹箭与制导学报,2008,28(5):165?168.
LIANG Jindeng, LI Dongxu. The study on strategies for orbit interception of aerospace vehicle [J]. Journal of projectiles, rockets, missiles and guidance, 2008, 28(5): 165?168.
[9] 刘敦,赵钧.空间飞行器动力学[M].哈尔滨:哈尔滨工业大学出版社,2003:17?19.
LIU Dun, ZHAO Jun. Space vehicle dynamics [M]. Harbin: Harbin Institute of Technology Press, 2003: 17?19.
[10] 王志刚,施志佳.远程火箭与卫星轨道力学基础[M].西安:西北工业大学出版社,2006:152?169.
WANG Zhigang, SHI Zhijia. Long?range rocket and satellite orbital mechanics foundation [M]. Xian: Northwestern Polytechnical University Press, 2006: 152?169.
[11] 罗居刚,雷宏波.椭圆型结构任意弧长的计算问题[J].治淮,2007(2):14?16.
LUO Jugang, LEI Hongbo. Calculation of arbitrary arc length of elliptic structure [J]. Harnessing the Huaihe River, 2007(2): 14?16.
猜你喜欢
广东石油化工学院学报(2022年4期)2022-09-13
国际太空(2022年7期)2022-08-16
小学生必读(中年级版)(2021年12期)2021-12-02
国际太空(2019年9期)2019-10-23
当代陕西(2019年14期)2019-08-26
传媒评论(2019年4期)2019-07-13
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
华人时刊(2017年17期)2017-11-09
现代金融(2016年7期)2016-12-01
