
基于位置信息的低轨卫星上行时钟同步方法
2018-08-28 08:52姚广济黄圣春
计算机应用 2018年6期
姚广济,王 玲,黄圣春
(1.湖南大学电气与信息工程学院,长沙410082; 2.国防科技大学电子科学学院,长沙410073)
(*通信作者电子邮箱wl_hunnu@163.com)
0 引言
本文的研究卫星模型来源于航天科技集团九院的预研究项目。该星座系统总计有66颗低轨道卫星,分布在6个轨道面上,可以确保实现任意地点、任意时刻的通信连接。
国外同类型低轨道卫星通信系统的主要代表是铱星系统。铱星系统通信模式采用多频时分多址码,在连接建立之前,地面单元根据测距信息以及来自卫星的每秒一次的广播信号来设定上行时钟同步[1-2]。由铱星轨道参数可得1 s内地面单元与卫星间距离变化最大值约为6.6 km,距离换算成时延,上行时钟同步精度为22 μs。铱星系统采用插入保护时隙来抵消卫星高速运动的影响。地面单元的控制台在铱星通信系统给地面单元分配的时隙以突发的形式发送信号[2]。
在卫星通信时分多址模式下,文献[1]提出的上行信号同步方法可以降低测距修正频率,对于上行时钟网同步具有参考意义。文献[2-5]提出了一些类似长期演进(Long Term Evolution,LTE)系统中的上行链路初始同步方法,对于初始同步有借鉴参考意义。文献[6-7]提出了一种联合同步和定位算法来估计接收机的时钟漂移参数和位置,能较好地跟踪接收机状态和时钟参数。文献[8]提出了一个频率跟踪时钟伺服来调整本地时钟与参考时钟同步的方法,与比例积分时钟伺服系统相比,可以实现快速同步和较高的精度。文献[9]对统一扩频体制下的星地时间同步技术进行了研究,研究中利用现有的卫星扩频测控通道,实现对卫星与地面钟差的测量,测量误差在10 ns以内,对于网同步研究具有重要的借鉴参考意义。文献[10]提出了在时分多址(Time Division Multiple Access,TDMA)下基于位置信息的开环时间同步方案并且设计了时隙分配协议,有效降低接入时的端到端时延。对比传统的自适应调整上行链路同步时间方法,文献[11]所提出的同步算法能更好地根据活动用户的位置确定的子区域自适应地调整超帧长度和上行链路同步时间。
针对传统基于测距信息来设定星地间上行时钟同步方法中建立链路之前要求地面单元每秒更新星地间距离信息,且难以应对广播信号帧突然中断的问题[12],本文提出了基于位置信息的星地间距离变化关系的上行时钟同步方法。地面单元根据自身的位置信息和接收到的卫星广播星历可以算出星地间距离,从而获取发射信号提前量,达到时钟同步目的。
1 系统模型
课题模型来源于航天科技集团九院的预研究项目。系统使用地心赤道直角坐标系O-XYZ(也称惯性坐标系),坐标原点在地心,O-XY平面与赤道面重合。Z轴指向天球北极,X轴指向春分点,Y轴与X和Z轴构成右旋坐标系。
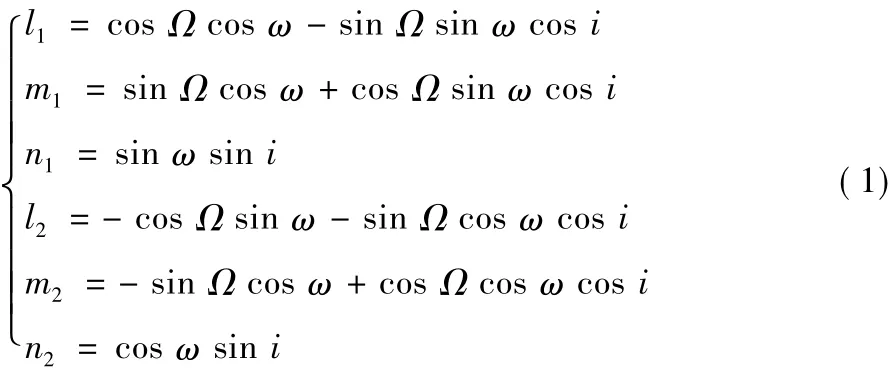
在地心赤道直角坐标系中,为准确、完整地描述卫星在某一时刻的空间位置,引入卫星轨道六参数:1)卫星运动轨道椭圆偏心率e;2)卫星运动轨道半长轴a;3)卫星运动轨道倾角i;4)近地点幅度角ω;5)近地点时刻τ;6)升交点赤经Ω。为最终将卫星位置信息表述为时间的函数关系式,引入中间变量:l1、m1、n1、l2、m2、n2,以简化运算表达式。中间变量的具体关系式见式(1):

式中:t为时刻;ns为卫星在轨运动的平均角速度;Tsat为卫星轨道周期;E(t)为t时刻的偏近点角;(X(t),Y(t),Z(t))分别为卫星在t时刻对应X、Y和Z轴的坐标值。
结合式(1)~(3)可知:由升交点赤经Ω、近地点幅角ω、轨道半长轴a、椭圆偏心率e、轨道倾角i、过近地点时刻τ六个轨道参数,可求出任意 t时刻卫星位置(X(t),Y(t),Z(t))。这样也就得到了卫星运动轨迹的数学模型。
2 上行时钟同步方法
地面单元与卫星间的距离不等且时刻变化,故而不可能采用调整卫星上中心站接收机时钟的办法来达到与覆盖区域所有地面单元网同步的目的。这个时候,就需要根据地面单元与卫星间距离远近,相应调整地面单元发射信号的时间提前量,亦即发射机同步[13]方法。
时分复用情境下,地面单元只有在分配的时隙发送信号才能被卫星接收,即地面单元的发射机必须保证其发送的上行链路信号到达卫星时,恰好是卫星星座系统分配给地面单元的时隙。为了避免在分配给不同地面单元的相邻时隙内的信号发生交叠,需要对上行链路进行同步处理,不然无法进行通信。在工程实际中,相邻时隙间需要加上一个较小的保护时隙。上行时钟同步精度愈高,保护时隙可以设定愈小,信道利用率也就愈高。这对于非常有限的卫星通信链路资源而言无疑是意义巨大的。
采用基于位置信息的上行时钟同步方法关键在于获取地面单元的位置信息,而获取地面单元位置信息就需要对地面单元进行定位解算。定位解算的一般方法是通过解算伪距方程组来实现。伪距测量可以是单星测多次,也可以是两颗星、三颗星及以上的情形。地面单元要完成授时及保持上行时钟同步,需要得到地面单元的三维坐标和地面单元时钟与卫星系统时间的时刻偏差,故而需要至少4个伪距测量方程。伪距测量方程如式(4)所示:

式中:(xu(t*),yu(t*),zu(t*))为地面单元在不同时刻的位置,是有待定位求解的未知数;(X(t*),Y(t*),Z(t*))为已知的卫星的位置:ρ(t*)为t*时刻测得的卫星伪距;c为光速;Δt为地面单元与卫星星座系统的钟差,是有待求解的未知数。这样,式(4)中总计就有13个未知数。设卫星系统时为tsat,地面单元时为tu,则钟差为:

赤经λ为与O-XZ平面的夹角,由春分点起算,沿赤道按右手螺旋方向为正值。赤纬φ为与O-XY平面的夹角,同Z轴正方向为正值。地面海拔设为h,高于海平面为正值。本文中设定0时刻赤经赤纬线与地理经纬线重合,亦即0时刻春分点与地理0度经线0度纬线交点重合。
地面单元相对地面静止情形下,设初始t0时刻地面单元位置为(λ(t0),φ(t0),h(t0)),t时刻地面单元位置为(λ(t),φ(t),h(t)),则有:

式中:Tearth为地球自转周期,本文仿真实验中取86400 s。
在地心赤道直角坐标系中,t时刻相对地面静止的地面单元位置为(xu(t),yu(t),zu(t))。静止单元的位置信息与时间t的函数关系表达如式(7):

为运算方便,式(8) 中引入中间变量:αm,n、βm,n和 γm,n,分别为地面单元的xu、yu、zu坐标值在tm、tn时刻的比值,其中m、n均为正整数。

变换式(8)的形式得式(9):


结合式(6)~(9)可以将式(4)表示如式(10):
这样,就将式(4)中的13个未知数减少到式(10)中的4个未知数。然后再对非线性方程组采用基于最小二乘原理的方法解算出地面单元的位置信息和系统钟差,之后便可以得出卫星与地面单元间距离随时间的变化关系,距离换算成时延即可得出任意时刻地面单元的上行信号发送时间提前量,实现系统的上行时钟同步。
综合起来,上行同步方法的流程如图1所示。
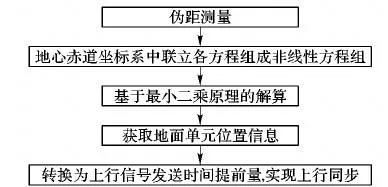
图1 上行时钟同步方法流程Fig.1 Flow chart of uplink clock synchronization method
3 性能仿真与分析
3.1 仿真设置
本文采用的星地通信协议是频分多址/时分多址/频分双工,上行频段分为L波段上行1 668 MHz~1 675 MHz和S波段1980 MHz~2010 MHz,下行频段分为L波段1518 MHz~1525 MHz和S波段2170 MHz~2200 MHz。语音频道信息速率为 2.4 kb/s。
仿真是基于STK和Matlab仿真软件平台。星座覆盖仿真是针对整个卫星星座来进行的。定位仿真中应用到的卫星编号有1_01、2_01和3_01,其轨道根数为升交点赤经Ω、近地点幅角ω、轨道半长轴a、椭圆偏心率e、轨道倾角i、过近地点时刻τ,设定如表1所示。

表1 卫星轨道根数Tab.1 Orbit elements of satellite
伪距方程中伪距误差使用均值为0、方差为3的正态随机分布函数来模拟产生。定位误差采用蒙特卡罗方法随机模拟1000次取统计值。
由于伪距测量误差的随机性,得到的伪距测量方程联合构成非线性方程组,不能直接求解,需要采用非线性系统的数学方法[14-15]。仿真中对地面单元进行解算定位采用的是基于最小二乘法原理的非线性方程组解算方法。
3.2 卫星星座覆盖仿真
图2为对不同纬度带单点进行覆盖概率分析,结果表明:赤道处有且仅有1颗卫星覆盖的概率将近30%;纬度为30°时,2颗及以上卫星覆盖的概率将近90%;纬度为60°时,3颗及以上卫星覆盖的概率约为90%。

图2 卫星覆盖概率随纬度变化关系Fig.2 Relationship between satellite coverage probability and latitude
3.3 单星、双星和三星定位
3.3.1 单星定位
图3仿真的是地面单元在有且仅有1颗卫星覆盖时,对经纬度位置为(0,0)的目标单点进行定位解算情形,开始定位时刻为0 s,用到的卫星编号为LEO_1_01。仿真结果表明:伪距方程组个数越多,定位效果越好,但同时也增加了运算复杂度。随着定位时长的增加,定位误差是减小的。定位时长和伪距方程组个数共同影响着定位误差,通过增加伪距方程组个数和延长定位时间可以达到300 m定位范围。
3.3.2 双星定位
地面单元在有2颗卫星覆盖时对经纬度位置为(5,30)的目标单点进行定位解算情形如图4所示,用到的卫星编号为LEO_1_01和LEO_2_01。开始定位时刻为518.655 s。每颗卫星提供同等个数的伪距方程,比较了6、8和10个伪距方程组成非线性方程组解算定位误差的效果。仿真结果表明:随着定位时长的增加,定位误差是减小的。定位用到的伪距方程个数增加会使定位误差减小。对比图3的单星定位可以发现:由于双星定位的几何构型较好,在达到同样的定位误差情况下,双星定位需要用到的伪距方程个数明显变少,定位时长也明显缩短。
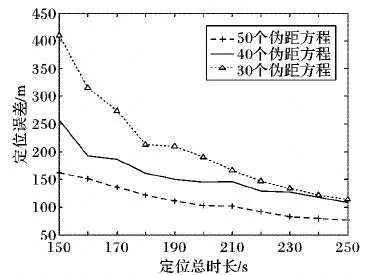
图3 单星定位误差与定位时长的关系Fig.3 Relationship between one satellite's location error and location time

图4 双星定位误差与定位时长的关系Fig.4 Relationship between two satellites'location error and location time
3.3.3 三星定位
地面地面单元在有3颗卫星覆盖时对经纬度位置为(10,60)的目标单点进行定位解算情形如图5所示,用到的卫星编号为LEO_1_01、LEO_2_01和LEO_3_01。开始定位时刻为1044.552 s。每颗卫星提供同等个数的伪距方程,比较了6、9和12个伪距方程组成非线性方程组解算定位误差的效果。对比图3的单星定位和图4的双星定位可以发现:图5中三星定位的精度提高非常明显,定位时长成为了影响定位误差最大的因素。另外,此时增加伪距方程个数对减小定位误差作用不大,整体而言伪距方程个数越多,定位误差偏小。
3.4 仿真分析
单星定位解算情景下通过增加伪距方程组个数和延长定位时间可以达到300 m定位范围。双星和三星定位解算情景下定位时间相较单星情形明显缩短,此时伪距方程组个数不再是影响最大的因素,故而主要通过延长定位时间达到300 m定位范围,定位误差换算成时延。本文基于位置信息的上行同步方法精度可以达到1 μs,而铱星系统基于测距信息的上行同步方法精度约为22 μs。

图5 三星定位误差与定位时长的关系Fig.5 Relationship between three satellites'location error and location time
拓展开来,该方法也可以对在地面低速移动的地面单元进行定位解算。地面运动的单元,其运动矢量在卫星视距矢量方向上的投影距离实际上要远远小于定位误差,定位误差实际上是卫星与地面单元真实距离误差的上限。只有在三点一线的情况下,即地面单元真实点、定位解算点与卫星在同一条直线上时,星地间真实距离误差才等于定位误差。
4 结语
本文引入地心赤道直角坐标系下赤经赤纬概念巧妙地消除了地球自转的影响。在时分复用情景下,本文通过测量伪距得到非线性方程组,采用基于最小二乘原理的解算方法,定位解算出地面单元的位置,提出了基于位置信息的星地间距离变化关系的上行时钟同步方法,同步精度可以达到1 μs。本文提出的上行同步方法能对全球范围内任意地点任意时刻的地面静止单元以较高精度实现低轨卫星星座通信系统内上行时钟同步。
猜你喜欢
地理空间信息(2022年10期)2022-10-31
环球人物(2022年4期)2022-02-22
导航定位学报(2021年5期)2021-10-13
小资CHIC!ELEGANCE(2021年32期)2021-09-18
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
小学生学习指导(低年级)(2020年10期)2020-11-09
数学大王·低年级(2018年9期)2018-10-24
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
