GNSS RTK接收机检定方法研究及结果分析
2018-09-03 00:46董江
导航定位学报 2018年3期
董 江
(1.武汉大学测绘学院,武汉 430079;2.交通运输部北海航海保障中心天津海事测绘中心,天津 300222)
0 引言
厘清国内外标准之间的关系,判定这些标准的适用性,无论对国内测量仪器生产厂家还是对使用者都具有重要意义。本文从测量仪器精度定义及测量误差处理的基本原理出发,对文献[1]提出的检定方法进行研究,最后以国产测量仪器“海星达H32”为例,按照文献[1]及文献[2]规定的方法进行了实际检定。
1 CH/T 8018-2009规定的检定方法及精度指标分析
GNSS RTK作业模式的测量原理如图1所示:基准站通过电台将接收到的GNSS卫星的定位信息及基准站坐标等信息构成的数据链发送到流动站;流动站不仅接收来自基准站数据链的数据,同时自己也接收GNSS卫星的定位信息,并按照一定的算法对这些定位信息进行实时处理,得到流动站的实时位置信息。基准站和流动站必须保持同时跟踪4颗以上相同卫星,而且卫星的几何图形必须满足一定的要求。
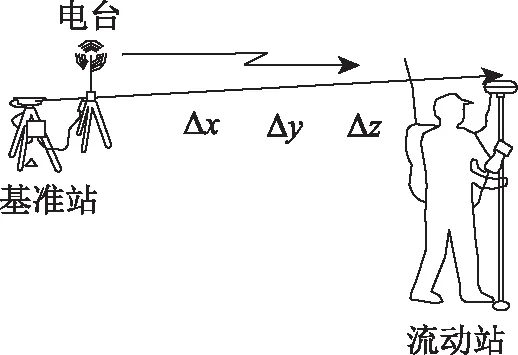
图1 GNSS RTK测量原理示意图
1.1 检定方法
文献[1]提出的检定方法需要已知的高精度基线检定场,即检定场应至少由6个点构成,这些基线点可以构成一条直线,也可以构成网状。基线的边长应为2~5 km,基线边长的相对精度应优于1×10-6。基准站的绝对地心坐标(WGS84)精度优于1 m。该方法是在一个基线点上架设基准站并设置基准站的各项参数(包括参考站坐标、天线高、参考站电台频率、数据传输通道等),启动基准站使其正常工作,连接并设置流动站,对流动站进行进行初始化;待流动站初始化成功后,依次将流动站置于检定场内其他各点进行RTK测量数据采集,在每个点上要输入正确的天线高,每个点上记录不少于20个测量结果(WGS84坐标),最少在4个点上进行数据采集。
RTK测量精度ms的计算公式为
(1)

1.2 仪器精度表达
仪器生产厂家标示的仪器精度表达式[2,4]为
(2)
式中:σxy为仪器厂家标示的RTK接收机的水平位置的测量精度;σx为仪器厂家标示的RTK接收机的x方向的测量精度;σy为仪器厂家标示的RTK接收机的y方向的测量精度;axy为水平位置测量精度的固定参数;bxy为水平位置测量精度的比例参数;σz为仪器厂家标示的RTK接收机的垂直方向(z方向)的测量精度;az为垂直方向测量精度的固定参数;bz为垂直方向测量精度的比例参数;d为基准站与流动站之间的距离。
文献[1]将RTK接收机的精度表达式为
1)单桩基础的谱疲劳分析中,传递函数的选择对疲劳评估影响很大,在选择传递函数时,应综合考虑结构实际尺寸以及Morison方程的应用限制条件。
(3)
式中:σCH为文献[1]规定的RTK接收机的测量精度;a为仪器标称固定误差;b为仪器标称比例误差;其余符号与式(2)相同。
1.3 仪器精度合格标准判断
文献[1]判定仪器精度合格的标准为:按照前述方法获得mr、ms后,依据流动站与基准站之间的距离d及式(5)计算出σCH,当mr≤σCH及ms≤σCH都满足时,表明该套(台)RTK接收机合格。
1. 4 检定方法精度指标分析研究
仪器生产厂家的在说明书中表示的RTK接收机的测量精度是按照式σ=(a+b×10-6×d)的形式标出,这种表达方式也获得了国际标准[2]的认可,也成为国际测绘界达成的共识,例如文献[4]给出了徕卡公司GPS1200+型RTK接收机的测量精度为:水平位置为(5 mm+0.5×10-6×d);垂直方向为(10 mm+0.5×10-6×d)。而文献[1]却将RTK接收机的测量精度表示成了式(3)。很显然:式(2)与式(3)的表达形式不一致,其内容也不一致;式(1)没有区分水平位置与垂直方向的精度,通常情况下垂直方向的精度较水平位置的精度低许多。
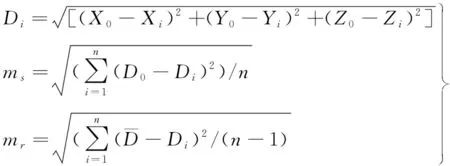
按照文献[1]的测量方法,即“每个点上记录不少于20个测量结果(WGS84坐标),最少在4个点上进行数据采集”及相应的计算公式见式(2),很明显,式(2)仅仅是一个流动站的计算结果,如果需要将多个流动站的检定数据统一进行计算,则其完整的公式为
(4)
另一方面,RTK接收机输出值就是流动站的坐标(X、Y、Z),需要检定的对象就是流动站坐标(X、Y、Z)的测量精度,而不是流动站与基准站之间的距离D。微分式(4)中的Dij并忽略掉基准站的误差可得

(5)
依据方差协方差传播定律并与式(2)相对照可RTK接收机测量流动站与基准站之间距离的精度σD为

(6)
由式(6)可以看出:σD不仅与流动站坐标的测量精度(σx、σy、σz)相关,而且与流动站基准站之间的距离Dij、流动站基准站之间的坐标差(Xij-X0、Yij-Y0、Zij-Z0)相关;无论怎么简化式(6),都不可能简化成式(3)的形式,更不能够导出仪器生产厂家标示的RTK接收机的测量精度表达式式(2)的表达形式,因此文献[1]计算出的mr、ms不是RTK接收机测量精度的直接表达,它们只是一个间接量(流动站与基准站之间的距离)的重复性与复现性,与仪器生产厂家标示的流动站3维坐标精度不直接相关。
2 实际检定与结果分析比较
为了分析比较CH/T 8018-2009规定的检定方法和ISO 17123-8规定的方法检验RTK接收机测量结果,在如图2所示的基线场进行检定。实验用的设备为海星达H32,其标称的RTK 定位精度:水平位置为±(10 mm+1×10-6×D);垂直方向为±(20 mm+1×10-6×D)。

图2 检定基线场示意图
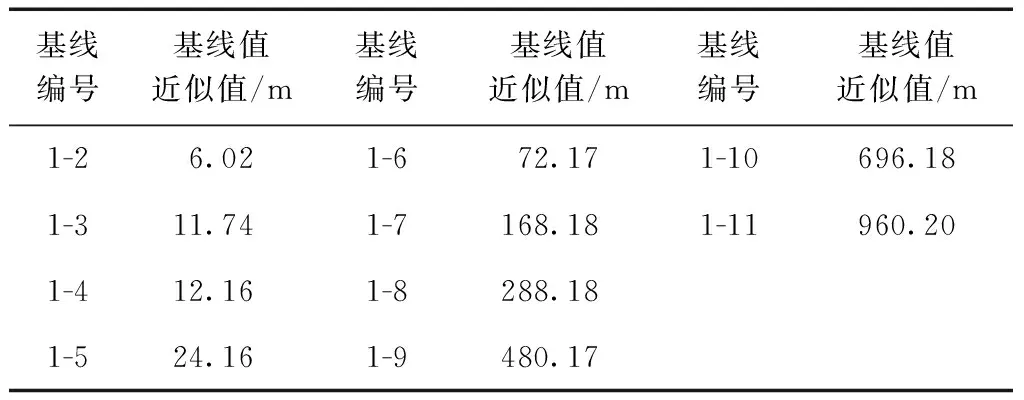
表1 实验所用基线场(为保密起见,没有给出毫米位)
2.1 CH/T 8018-2009规定的检定方法检验结果
完全按照文献[1]给出的检定方法:将基准站架设在图2所示的1号点上,输入1号点的已知3维坐标,依次将流动站设置到2~11点上,流动站每次设站后读取30次,按照文献[1]的计算结果见表2。
从表2可以看出:RTK的重复性精度mr满足H32出厂的精度指标;复现性指标即测量精度ms无法满足H32出厂的精度指标。按照CH/T 8018-2009的判定准则,该套RTK接收机H32为不合格仪器。
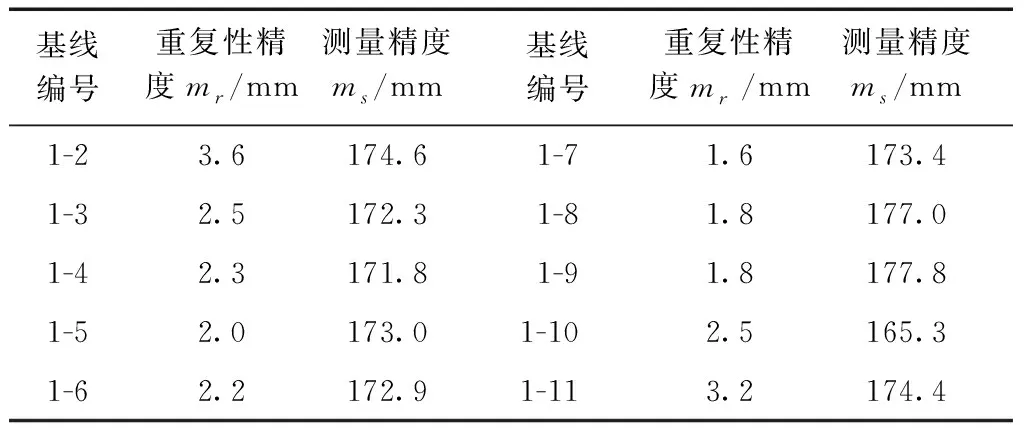
表2 H32检定结果
2.2 ISO 17123-8规定的检定方法检验结果

3 结束语
RTK接收机现已成为测绘生产单位的一种常规设备,也是提高生产效率的关键设备之一;我国的测绘仪器生产厂家正在大规模地生产各种型号的RTK接收机并出口到世界各地。检定规程作为判定仪器是否合格的最后标准,应该是理论正确、方法国内外通行、技术指标合理,但现行的CH/T 8018-2009存在无法实现对RTK接收机的正确检定。因此,建议国家有关部门在充分调研国外现行标准的基础上,对CH/T 8018-2009进行修订,以满足仪器生产厂家及生产作业单位检定RTK接收机的需求,协助我国的测绘仪器生产厂家实现走出去的战略。
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
中国科技纵横(2020年3期)2020-06-11
中国市场(2019年29期)2019-12-06
中国电气工程学报(2019年18期)2019-10-21
小猕猴智力画刊(2019年6期)2019-08-13
电子制作(2019年24期)2019-02-23
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03