POS在铁路轨道不平顺性检测中的应用
2018-09-03 00:46孟凡效张宇冉丁乐乐黎蕾蕾权冉冉
导航定位学报 2018年3期
孟凡效,张宇冉,丁乐乐,黎蕾蕾,权冉冉
(1.天津市勘察院,天津 300191;2.重庆大学 航空航天学院,重庆 400044;3.中交天津港湾工程研究院有限公司,天津 300220)
0 引言
随着我国高速铁路的建设与运营里程的增加,人们的出行变得方便快捷;与此同时,人们对于乘车舒适度和安全度的要求越来越高。铁路轨道不平顺性是影响列车行驶快慢和安全性的一项重要指标。
目前国内外对于铁路轨道不平顺性检测的手段主要包括以下几种:大型综合高速轨检车、便携式轨检小车、弦线与道尺[1]。但是每一种方式都存在各自的缺点:大型综合高速轨检车虽然可测线路整体状况,但无法对局部以及重点路段进行精确测量,而且综合轨检车数量少、技术复杂,成本高昂[2];便携式轨检小车可精确测量小区域的线路状况,但是作业效率低,而且精度受外界因素(控制点点位精度、温度、风力等)影响较大,且每次迁站只能测量60 m左右,无法进行长波的检测[3];弦线与道尺技术手段落后,效率低且受人为因素影响较大。铁路的快速发展,对于高铁而言每日仅4 h的天窗时间用于检查,传统轨道检测手段难以满足现实的实际应用需要;因此迫切需要一种新的轨道平顺性检测手段来提高人工检测效率和精度。
目前集全球卫星导航系统(global navigation satellite system,GNSS)和惯性导航系统(inertial navigation system,INS)于一体的定位测姿系统(positioning and orientation system,POS)主要应用于航空遥感和车载移动测量。随着惯导设备精度的提高,POS系统得到的点位精度也逐步提升[4]。POS系统可直接输出载体高精度的三维位置和姿态角信息,顾及到INS的高采样率特性,依次综合考虑离散点位置和姿态信息便可重绘出载体的运动轨迹。这正是铁路检测所需要的,载体平台和轨道之间无缝运动,载体平台的轨迹便可代表轨道的几何形状,既可以得到高精度的数据结果,又可以提高效率,达到轨道几何状态检测的目的。
1 铁路轨道不平顺参数及检测方式
轨道的几何状况检测参数可以分为内部几何参数和外部几何参数[5]。内部几何参数主要刻画钢轨间的相对精度指标,主要包含轨距、超高(水平)、轨向(正矢)、高低。为了进一步从整体上对轨道进行分析,防止其实际位置偏离设计位置,需要检查其外部几何参数,即中心线实际的绝对位置[6]。传统的检测方式主要是使用全站仪静态采集轨检小车进行检测。
1.1 轨距
轨距是指左右两股钢轨内侧顶面下16 mm处两作用边间的最小间距[5]。我国当前使用的标准轨距值是1 435 mm,实测轨距值和标准轨距的差值称为轨距误差。
在轨距检测时,通常使用全站仪轨检小车上面的轨距传感器进行轨距测量。新的POS方式也是通过安装在小车上面的轨距传感器对轨距进行测量的。
1.2 超高
超高(水平)指铁路轨道在相同里程点的左右钢轨顶面的实测高程与设计高程的差值[7]。在轨道直线部分高差理论设计值为0,直线段实测值与设计值0之间的差值称为水平不平顺。曲线段的设计值一般不是0,根据路线设计而定,曲线段的实测值与设计值的差值称为超高不平顺。
传统测量时通过全站仪轨检小车上面的水平传感器测量的横向倾角及钢轨顶面的中心距离进行计算,新的POS方式是通过组合导航计算的横滚角代替水平传感器计算的倾角来计算超高值。
1.3 轨向(正矢)
二者本质为同一个检测项目,反映轨道左、右二轨在横向方向的平顺性指标,直线段称为轨向,曲线段称为正矢[5]。本文以轨向为示例进行详细说明。不同的国家对于轨向的检测方法有不同的指标,我国传统方法是以10 m弦长作为检测方法。如图1中,以B点为圆心,以10 m长为半径做圆,会和依据实测的轨道平面坐标(含左、右轨)拟合出的曲线相交在A、C2点,则B点到AC连线的水平距离即为测点B处的实测轨向值[8]。
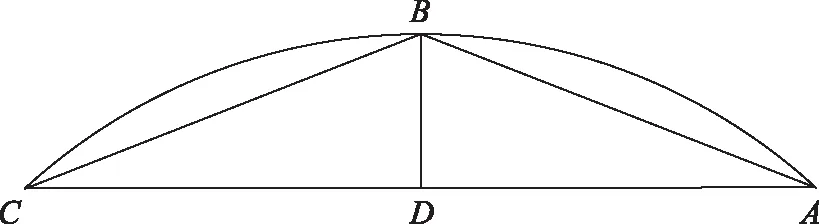
图1 我国轨向10 m弦长检测原理
传统全站仪轨向检测方式是通过外业测量前在处理软件中输入测量线路的设计曲线参数及各控制点坐标;实际测量时,利用后方交会原理,通过自动全站仪观测控制点坐标及轨检小车棱镜,得到全站仪轨检小车上安装棱镜的中心点坐标;根据小车的设计参数,反求出测量点左右轨道面的坐标值;然后按照相应参数计算公式利用各点东、北向坐标值和设计值计算轨向值。
1.4 高低
高低是指轨道沿铁路设计线路方向在竖平面内的不平顺程度,其定义、检测方法和轨向类似,规范中对轨向的规定同样适用于轨道的高低检测[9-10]。与计算轨向需使用东、北向坐标不同,在计算高低时需要测量点的里程及高程数据进行高低参数的计算。
1.5 轨道几何测量精度要求
按照《高速铁路设计规范》要求,表1列出线路轨道静态作业允许各不平顺性参数偏移量的范围值。
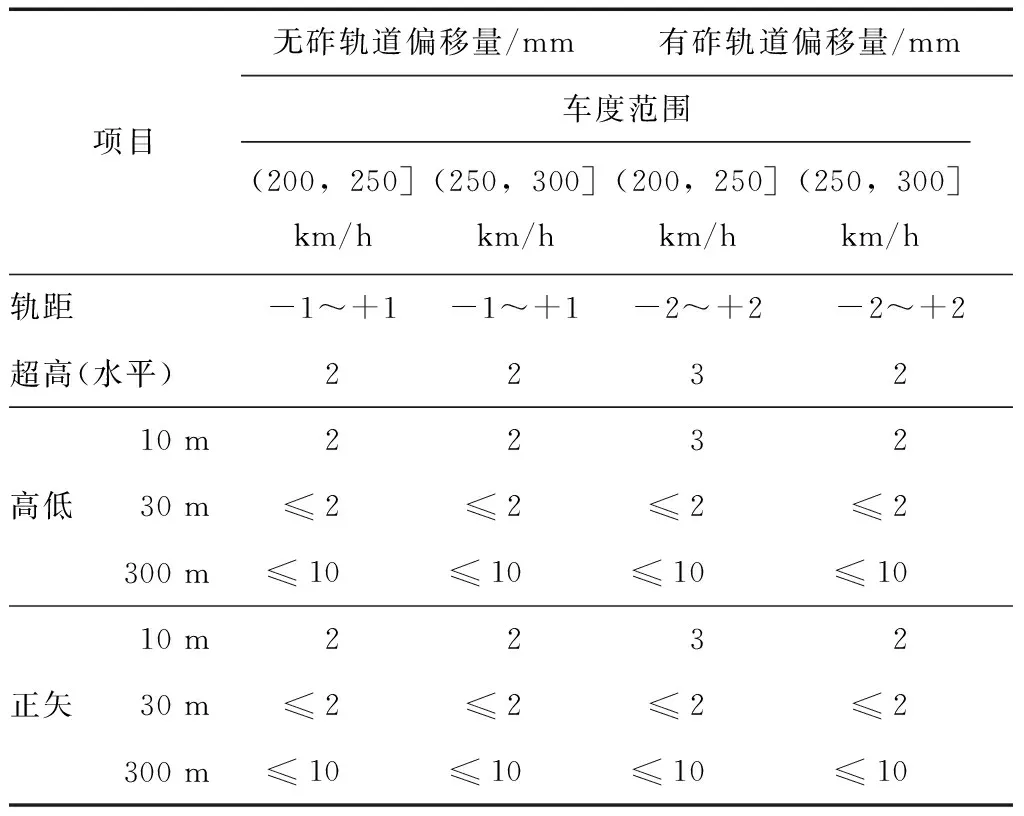
表1 线路轨道静态作业允许各不平顺性参数偏移量范围值
2 GNSS/INS组合POS模型
本文中GNSS/INS组合是使用卡尔曼滤波对GNSS和INS进行松散组合实现,其对应的状态方程和观测方程分别为
(1)
(2)
针对轨道检测所要达到的高精度要求,同一测段采用多次重复测量方式,使用载波相位差分算法对GNSS观测数据进行处理。对于解算得到的GNSS结果数据,通过斜率识别法分割区间及正交最小二乘拟合算法对每个小区间进行线性拟合优化,提高GNSS结果的相对定位精度。将优化后的GNSS结果与INS数据进行松组合,采用正-反-正三向卡尔曼滤波算法对组合数据进行优化处理[11],对组合结果按照实际测量路段线型进行再次线性优化,得到高精度的离散点位置和姿态数据。根据各设备之间的安装位置以及姿态角信息,将得到的高精度点位位置转化到计算铁路不平顺性参数所在的坐标系统中,然后按照各不平顺参数的计算公式计算各参数。
3 实验与结果分析
为了验证GNSS/INS组合计算不平顺参数新方式在计算铁路不平顺性参数中的正确性和可行性,通过在铁路运行天窗期对同一测试铁路段分别使用传统全站仪静态小车和本文新检测方式对已运营线路实地采集数据,与铁路设计参数进行30 m弦长不平顺性参数对比来进行实验验证。
3.1 系统组成与采集实验
实验数据为2016年12月某天晚上在铁路天窗期铁路客运专线运营线路实地使用POS小车采集的数据。基站通过三脚架安放在铁路沿线的CPII控制点位上面,基站使用的GNSS接收机为北斗卫星导航系统(BeiDou navigation satellite system,BDS)、全球定位系统(global positioning system,GPS)、格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)三星双频,数据采样率为2 Hz,GNSS接收机基站架设如图2所示。

图2 基站实地采集数据
移动站接收机设备与惯导设备安装在POS小车上面,移动站的GNSS接收机同样为BDS/GPS/GLONASS三星双频,采样率为20 Hz。惯性测量单元(inertial measurement unit,IMU)设备使用的国产某型号的激光惯导设备,该IMU设备的采样率为200 Hz,陀螺仪零偏稳定性为0.001(°)/h,加表零偏稳定性为4.9×10-5m/s2,轨检数据采集设备在POS小车上面的安装位置如图3所示。

图3 POS小车设备安装说明
数据采集流程如下所述:首先架设基站,把基站设置静态采集数据模式,待基站成功锁星并且开始正常存储数据后,进行POS小车设备通电,数据采集开始,正反向共推行4趟。POS小车在起点位置首先静态采集10 min左右,随后以1.5~2.0 m/s速度人工推行POS小车1.2 km左右至测试终点位置,随后在终点位置静态采集10 min,然后反向推行至起点位置,起点位置静态采集5 min,随后再正向推行至终点位置,终点位置静态采集3 min,反向推行至起点位置,起点位置静态采集10 min,随后关闭设备电源,一次数据采集完成。基站架设位置离移动站的距离为50~1 300 m。数据采集条件良好,属于短基线动态差分解算,POS小车推行途中没有发生GNSS锁星失败情况。
3.2 GNSS差分结果拟合与不拟合对比
对采集的GNSS数据,使用动态事后差分高精度解算软件处理采集的数据,并按照采集的趟数对采集的数据按照线型拟合算法进行优化后处理,并将点位平面坐标按照里程和高程进行画图。
以铁路直线段为例进行拟合方式说明。通过差分得到点位坐标,平面东北向坐标使用3 m长度的大区间来拟合长度为0.1 m的小区间离散平面点,高程坐标使用5 m长度的大区间进行拟合长度为0.1 m的小区间离散高程点;通过大区间的内部离散点,按照直线方程y=kx+b,使用正交最小二乘拟合算法获得大区间段的斜率k以及截距b,并通过得到的k和b,根据与待拟合小区间的点位数学关系来拟合处理长度为0.1 m小区间内部的离散点。
图4给出了GNSS平面位置优化结果对比整体图,图5给出了平面位置优化结果对比局部放大图。从图5中可以明显地看出每一趟数据的分布情况以及使用线型拟合算法对数据进行优化后的结果对比情况,并且图中可以看到优化后的结果与原始数据整体线型非常吻合。

图4 GNSS平面位置优化结果
从图4、图5可以看出,本次GNSS采集数据的平面位置大约在直径为2 cm的圆柱内,拟合后的平面位置处于原始数据离散点的中间,拟合算法是根据该段实际铁路设计线型所处的线型进行拟合,因此拟合后的线型相较于原始数据线型,与实际铁路设计线型更加吻合。
GNSS高程优化结果如图6所示,从图6可以看出,拟合后的高程处于原始高程数据离散点的中部,而且拟合后的轨迹与原始数据吻合。对图6进行局部放大,得到图7。
从图7可以看出,GNSS原始差分结果高程的范围为直径4 cm的圆柱带,拟合后的高程在5 mm之内,可以看出明显提高了测量得到的点位高程精度,从而可以更好地用于计算轨检参数值。

图5 GNSS平面位置优化结果局部放大

图6 GNSS高程优化结果

图7 GNSS高程优化结果局部放大
使用拟合算法的意义在于拟合后GNSS结果可以消除观测中存在的随机误差,从而获得更高精度的三维点位坐标;高精度的GNSS差分拟合结果可以为INS数据组合滤波提供高精度的量测更新数据,从而得到高精度的反馈校准值,组合计算出来的位置、速度及姿态信息也会相应提高,进而对于提高计算不平顺参数精度有显著效果。
3.3 多趟测量姿态角重复性对比
对采集的数据进行GNSS/INS组合导航解算处理,得到各趟姿态角数据,按照到起始点的距离为横坐标,每一趟计算得到的姿态角为纵坐标进行画图对比。为了方便查看姿态角重复性的情况,对第二、第三及第四趟数据计算得到的姿态角数据分别进行一定量平移。例如对航向角结果,第二、第三及第四趟分别平移0.5、1.0、1.5°,以便查看各趟数据吻合情况。图8、图9、图10分别列出俯仰角、横滚角及航向角的4趟数据重复性对比情况。
由图可以看出,对采集的4趟数据计算得到的俯仰角、横滚角以及航向角,整体的线型走势都非常一致,线型的升降起伏规律都特别明显,没有发现有异常点的出现,说明了对数据处理的正确性。
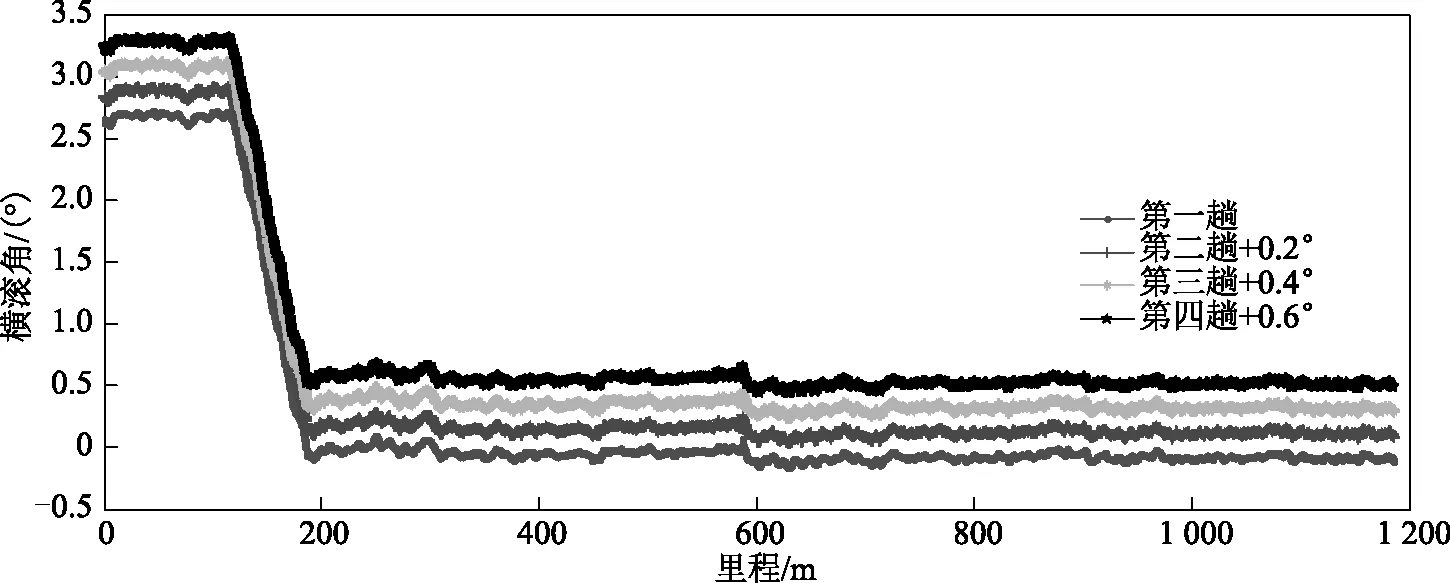
图9 横滚角重复性对比
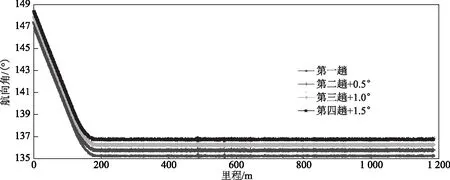
图10 航向角重复性对比
从图9横滚角度值的变化趋势可以发现,从里程0~110 m的横滚角度值在2.7°左右,从里程110~190 m左右横滚角度值从2.7°减小至0°左右,从里程190~1 180 m的横滚角度值都是在0°左右,从而可以看出从0~110 m的观测段数据属于圆曲线段数据,从里程110~190 m的观测段数据为缓和曲线段的数据,从里程190~1 180 m的观测段数据为直线段的数据,而且这也和实测轨道所处的线型相吻合。
从图10的航向角度值变化趋势也可以发现,从里程0~190 m的航向角度值一直处于变化中,说明该段数据显示的轨道所属于的线型为曲线段;而在里程190~1 180 m的航向角一直保持在135.3°左右,说明该段测量的数据属于的线型为直线段,进一步说明对采集数据处理的正确性。
为了更加形象地说明姿态角重复性的吻合度,对计算得到的每一趟的姿态角数据进行量化对比,得到任意2趟数据进行姿态角差值的均值、最大值以及标准差的计算,从而可以进一步说明计算结果重复性的精度以进行定量分析。为了便于表示,使用D12代表第一趟计算结果与第二趟计算结果之间姿态角差值的对比情况。表2列出了姿态角任意2趟之间的差值统计结果。
由表2可以看出:俯仰角的任意2趟差值均值在0.017°以内,最大值在0.006°以内,标准差在0.001 1°以内;横滚角的任意2趟数值差均值不大于0.01°,最大差值不大于0.021°,标准差不大于0.005°;航向角的任意2趟的差值均值在0.023°以内,最大差值不超过0.03°,标准差在0.001°左右。

表2 姿态角任意2趟差值对比统计 (°)
通过分析这些统计数据可以发现,对采集4趟数据、使用本文算法解算得到的横滚角、俯仰角以及航向角,4趟之间的吻合度都非常好,从而可以说明该算法的内符合精度很高,更加说明本论文使用计算方式的准确性以及可靠性。
3.4 与全站仪对比实验
对于采集的数据,使用本文提到的技术手段进行数据处理,为了对比处理结果的正确性、有效性及可靠性,同时使用传统的全站仪静态小车对该段轨道进行数据的实地采集和处理,并且通过与铁路测量段的所属工务段联系获得该段轨道对应里程处的左轨、右轨以及中心线的设计坐标。通过对轨枕点上超高不平顺、轨向不平顺值及高低不平顺值对比分析(如图11~13所示),验证使用新的技术手段计算结果的正确性及可靠性。

图11 POS小车与全站仪计算超高/水平不平顺值结果对比
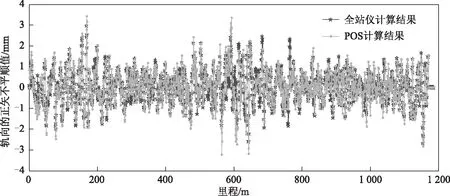
图12 POS小车与全站仪计算轨向不平顺值结果对比
由图11及图12可以看出:2种方式计算的轨向和高低不平顺值整体趋势是吻合的,仅部分点存在差异,该差异存在的原因主要是由于本文对惯导设备采集数据是连续的,而全站仪是间断型(隔一采一)采集方式,部分真实情况全站仪无法反映;超高不平顺的整体趋势也是一致的,但是存在较小偏差,该部分差异是由于本文未对惯导设备与小车之间的安装误差角进行有效的估计。表3给出了2种方式获得的不平顺值的统计结果。
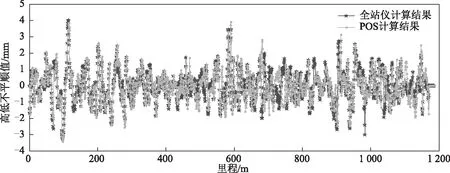
图13 POS小车与全站仪计算高低不平顺值结果对比
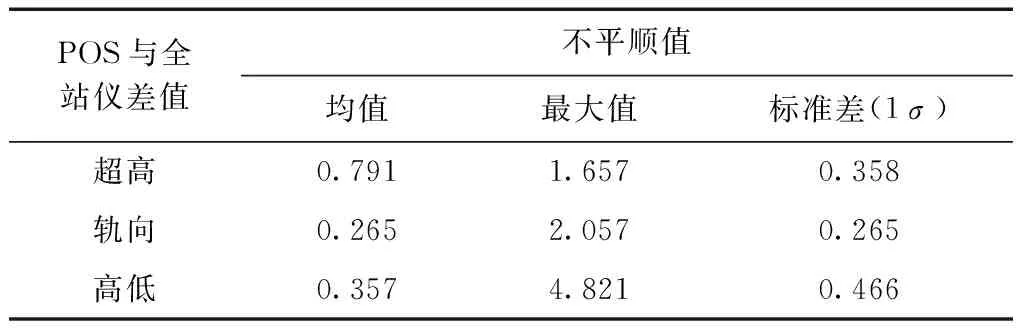
表3 POS小车和全站仪各平顺值对比统计mm
对比表中2种方式的超高不平顺值差值可得出,差值平均值为0.791 2,最大值为1.657 9,标准差为0.358 6 mm。因本测段属于普快专线的有砟铁路,超高不平顺的限值为3 mm,因此使用本方法计算的超高不平顺满足轨道测量的精度要求。对比2种方式轨向不平顺值差值可得出,差值均值为0.265 0,最大值为2.057 7,标准差为0.265 9 mm,说明二者计算的轨向不平顺值几乎一致的,存在零点几毫米的差别。对比2种方式高低不平顺值差值可得出,均值为0.357,最大值为4.82,标准差为0.466 1 mm,整体而言计算结果还是比较匹配的。
轨向和高低值存在差异主要是由于全站仪小车的采集方式并非连续测量,而POS小车则是连续采集,全站仪小车测量存在部分异常点未测情况,POS小车则可以真实反映每个点的实际情况,而且更高效和高精度,从而为不平顺参数的采集提供了一种新的技术手段。
4 结束语
本文通过将已有的GNSS/INS组合POS系统应用到新的铁路测量轨道不平顺性领域,在原有算法的基础上,使用优化算法将得到的点位坐标转换到计算不平顺性值所使用的坐标系中,通过同一测段多趟采集,对每一趟姿态角进行做差对比,得出多趟姿态角,并且结果非常吻合。与传统全站仪小车结果进行对比分析,得出新方式在计算30 m弦上不平顺性参数与全站仪计算结果相当,且作业效率是静态小车方式的8~10倍,可以达到预期的效果。在计算300 m弦的不平顺参数方面,精度还有部分欠缺,需要进一步改进和完善。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
今日农业(2021年11期)2021-11-27
昆明医科大学学报(2021年5期)2021-07-22
高中时代(2017年7期)2018-02-24
商情(2017年38期)2017-11-28
南方农业·下旬(2017年8期)2017-10-23
居业(2017年5期)2017-07-24
现代职业教育·中职中专(2016年4期)2016-10-21
小说月刊(2012年8期)2012-05-08
cookie world(2010年5期)2010-06-10