
空间相机温控系统的软件设计思路与方法
2018-09-07 02:31,,
单片机与嵌入式系统应用 2018年9期
,,
(北京空间机电研究所 先进光学遥感技术北京市重点实验室,北京100094)
引 言
空间相机温控系统的控温精度和可靠性对保证空间相机正常工作有着重要意义[1]。为使相机光学系统维持在稳定的温度水平以保障成像品质,一般重要部件都采用直接或间接的主动控温加热回路,即根据反馈的控温点测量温度精确补偿热量损失,实现关键部件温度的精确控制[2]。
相机控温系统的性能主要取决于3个方面:系统结构、热敏电阻的温度解算精度和温控策略。本文主要介绍一种通用的温控系统软件设计和实现方法,描述了空间相机温控系统的结构,结合测温精度、测温范围、存储空间、工作量等综合因素选择最优的温度标定与解算方法,结合系统特性和控温精度选择合适的温控策略,并介绍了软件实现方法以及设计实现过程需要注意的问题。实践证明,该方法适用于空间相机温控系统软件的设计与实现。
1 空间相机温控系统
空间相机温控系统由相机控温仪、相机主体、主体测温接口和主体控温接口等构成,温控系统组成原理图如图1所示。其中相机控温仪是空间相机温控系统的核心,一般包括管理CPU电路模块、测温及控温电路模块、供电模块。管理CPU电路采用51系列单片机80C32作为处理核心,由于80C32具有良好的稳定性和多次使用经验,其在空间相机温控系统乃至航天领域中都有着广泛的应用,CPU电路与卫星数管分系统总线接口采用1553B或CAN总线形式,卫星为控温仪提供一次电源接口。

图1 空间相机温控系统组成原理图
系统的测温原理是根据热敏电阻在不同温度具有不同的电阻值来确定对应温度值[3]。为了便于测量,将热敏电阻Rx串联一个10 kΩ的精密电阻进行分压,同时为了消除电缆长度、环境温度等因素的影响,系统采用两个标准精密电阻R0和R1对热敏电阻的测量值进行校正,其中A/D转换电路采用AD1674,并选择12位量化,以获得高精度的测量值。CPU通过控制相应通道,启动A/D转换装置,读取Rx、R0和R1的电压采集值Vx、V0和V1,并采用式(1)对Vx进行校正,以消除误差,其中V0s、V1s为标准回路R0、R1的电压测量值,Vx0为校正后的电压值。
(1)
图2为测温控温原理图,CPU通过测温点上热敏电阻的电压值获取温度,与设定温度进行比较,判断是否需要加热,并通过控温驱动电路控制加热片的通断将温度控制在目标温度。
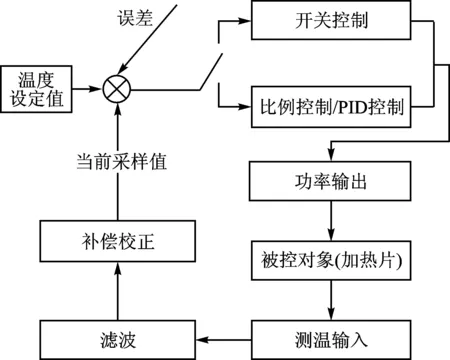
图2 测温控温原理图
2 温度标定与解算
温度标定与解算是控温流程中的重要环节,只有该环节做到精确才能保证测温精度,进而保证控温的精度[4]。
空间相机温控系统的测温流程一般分为以下3步:
① 进行A/D采集、校正和滤波,获得当前温度下的稳定电压码U;
② 根据标定所得的R-U转换系数,解算出该电压码对应的热敏电阻阻值R;
③ 根据热敏电阻自身特性参数,计算出热敏电阻对应的温度T。
热敏电阻是一种电阻值随温度变化的电子元件,工程实践中经常用到的是MF61和B6两种类型的热敏电阻,这两种热敏电阻T-R的换算关系如式(2)和式(3)所示。由公式可知,温度值越高热敏电阻值越低,该类型的热敏电阻为负系数热敏电阻。其中T为摄氏温度,R为热敏电阻阻值,a、b、c为给定的换算系数,由于该系数为厂家给定的表示热敏电阻特性的参数,所以认为通过该系数换算出的温度T和电阻值R的误差是极小的、可以忽略的。那么,通过标定得到R-U的转换系数,就成为决定测温精度的关键步骤。
(2)

(3)
由于电路、器件及热敏电阻的特性存在的细微差异,所以在精度要求较高的情况下,R-U的转换关系无法简单用同一个公式表示。常用到的温度标定与解算方法有查表法和多项式拟合法两种。但是由于查表法需要存储各个测温点的电压U和电阻值R的对应关系,温度间隔选取过大,则影响测温精度,温度间隔选取过小,则需要存储大量数据。在测温路数多,测温范围大的情况下,需要占用的程序存储空间相当可观。另外在测温精度要求较高的情况下,该方法也无法满足精度要求。多项式拟合法可以很好地解决上述问题,是普遍被采用的一种方法[4]。根据式(2)和式(3)的反函数可以求得在特定温度点下对应的热敏电阻阻值的合集,在工程实践中,根据测温精度的要求进行温度间隔的选取。
多项式拟合法标定过程一般分为以下3步:
① 选取标定温度点T的合集,并计算取得各个温度点对应的热敏电阻阻值R;
② 使用精密电阻箱模拟热敏电阻接入测温电路,测得各个阻值下对应的电压码U;
③ 使用MATLAB中polyfit(x,y,n)函数[5-6],对电压码U和电阻值R进行多项式拟合,根据测温误差和存储空间确定合适的拟合次数,从而确定R-U的拟合系数。
以某型号控温仪为例,要求测温精度在0~30 ℃范围内优于±0.2 ℃,在-40~0 ℃、30~70 ℃范围内优于±0.5 ℃。由于测温精度要求不同,并且测温范围较广,根据实践经验,采取分段拟合结合差值拟合的方法。
分段拟合:根据测温精度将测温范围分为3段,为-40~0 ℃、0~30 ℃和30~70 ℃。
差值拟合:将测温点以1 ℃为间隔进行标定,在得到标定数据后,在-40~0 ℃、30~70 ℃范围内通过线性差值得到每0.5 ℃的电压数据,在0~30 ℃范围内通过线性差值得到每0.2 ℃的电压数据,这样不仅保证了测温精度,也大大减少了标定工作量。
以某一路控温回路0~30 ℃温度区间为例,对数据进行了多项式拟合,拟合次数分别为1~10次,根据拟合系数计算出测温误差,如表1所列。从表1中可以看出,3次及3次以上的拟合误差均在允许范围内,4~10次的拟合误差明显优于3次拟合,但是4~10次拟合之间的误差并没有明显区别。选取合适拟合次数的原则是在满足精度要求的前提下,兼顾数据存储量和计算量。4次拟合需要存储5个浮点型的数据,10次拟合需要存储11个浮点型的数据,因此选取4次拟合更为合适。使用4次拟合所得系数计算0~30 ℃各温度点的误差,各个温度点的误差均在-0.03~0.02 ℃之间,优于±0.2 ℃的要求,如图3所示。
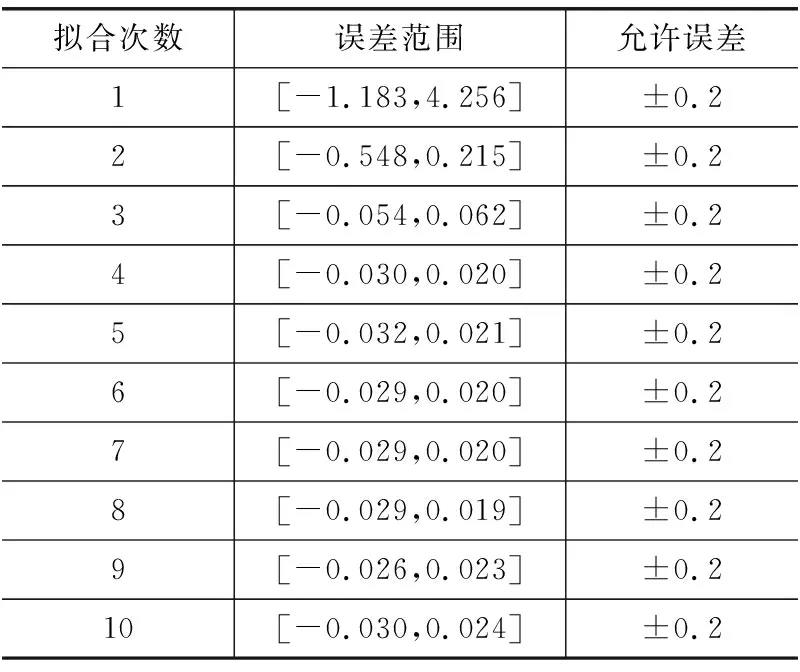
表1 0~30 ℃区间1~10次拟合误差(单位:℃)
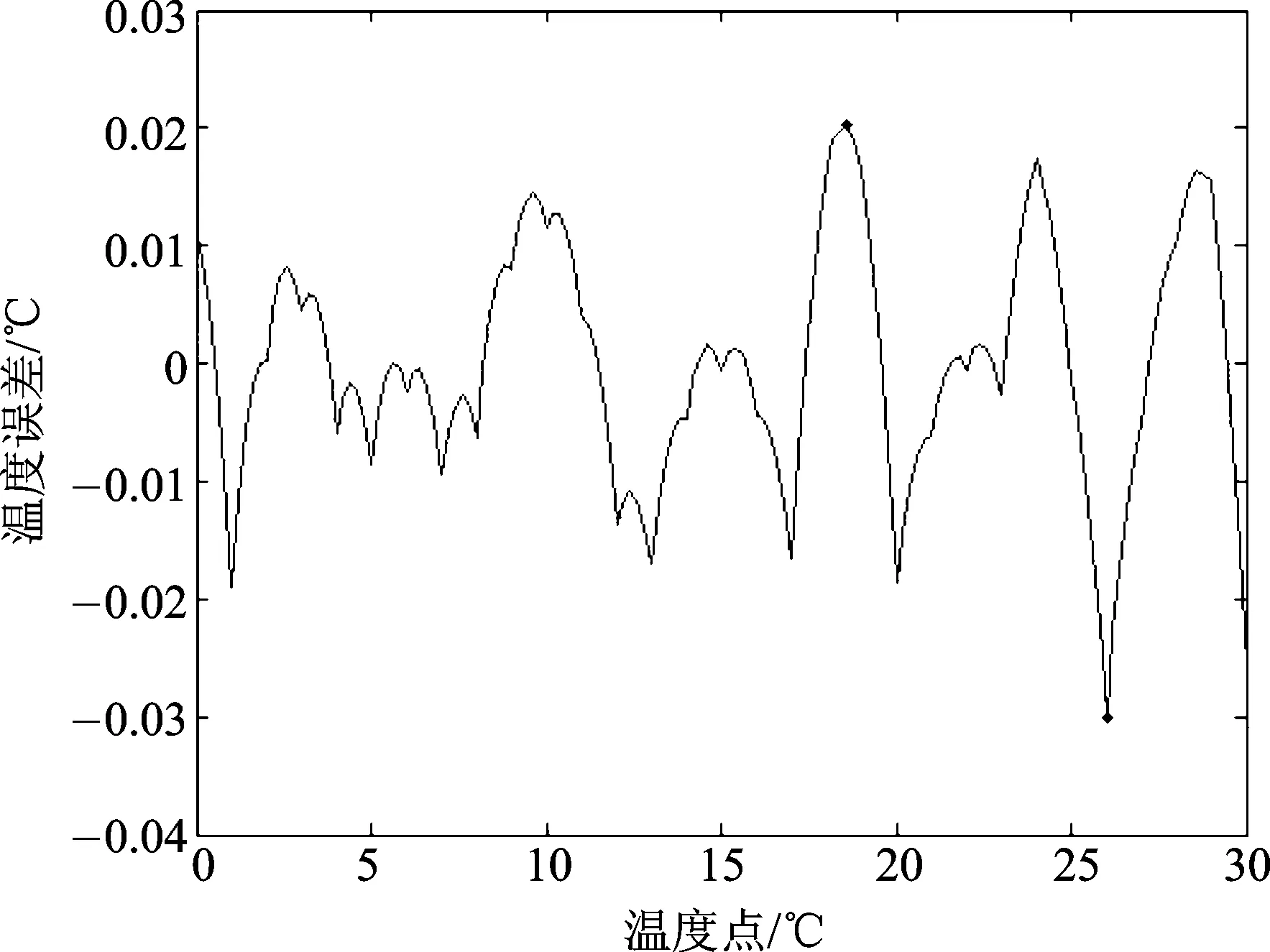
图3 4次拟合条件下0~30 ℃各温度点测温误差
3 温控策略
在空间相机温控系统中,一般包含多个控温回路,选择合适的温控策略是保证控温精度的关键环节。目前,常用的温控策略有开关控制、比例控制和PID控制,工程实践中经常用到的温控策略是开关控制结合比例控制或者开关控制结合PID控制。无论采用哪种温控策略,都需要确定一个固定的控温周期t,在当前周期输出上一周期计算出的加热时间,并计算出所有控温回路的加热时间,在下一周期进行输出。控温周期t需要根据测控温回路数进行合理的选择,一般在满足热控需求的条件下,应大于所有回路的测温周期。如果选择的控温周期过小,则可能在当前周期计算加热时间的时候,使用的是上一周期的温度量,导致连续两个控温周期内输出的加热时间相同,增加了CPU无用的操作;如果选择的控温周期过大,则温度的变化不能及时进行反馈,影响控温效果。
开关控制方法:如果当前温度低于设定温度,则下一控温周期加热时间为控温周期t;如果当前温度高于设定温度,则下一控温周期加热时间为0。
比例控制方法:根据当前温度和控温阈值上下限的关系求得加热时间,其中Tmax、Tmin、Tcur分别为控温阈值上下限和当前温度,计算方法见式(4)。
(4)

(5)
开关比例控制方法或开关PID控制方法:如果当前温度在控温阈值上下限之外,则采用开关控制;如果当前温度介于控温阈值上下限之间,则采用比例控制或PID控制,PID控制的设定温度应为控温阈值上下限的中心值。
开关比例控制是一种通用的控制方法,具有控制简单、成熟可靠的优点,对大多数控温对象都有较好的控温效果。开关PID控制方法具有响应速度快、调节动作迅速、消除稳态误差,并预测误差的变化趋势、避免严重超调等优点,但要达到良好的控温效果,需要对PID参数在真实环境中进行参数整定,其工作量明显大于开关比例控制方法。在实际应用中,可以根据控温精度要求和控温效果来选择不同的温控策略。
以某型号控温仪为例,要求0~30 ℃范围内测温精度优于±0.2 ℃,该型号采用的是开关比例控制方法,如表2所列,选取9个不同控温点为例,在各个控温点下的控温效果都满足要求。
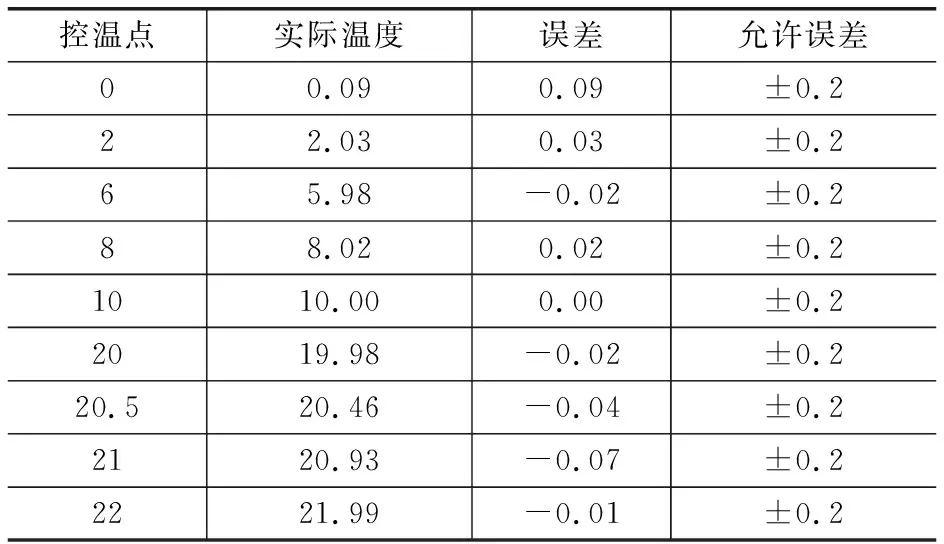
表2 不同控温点下的控温效果 (单位:℃)
4 软件设计与实现
温控系统软件的实现方法是在主程序中循环采集更新各个测温回路的温度量,温度属于缓慢变化量,不需要极高的实时性,结合各种数字处理方法的优缺点,软件采用了去极值平均滤波法,在消除偶然脉冲干扰和周期性干扰的同时,在一定程度上作数据平滑处理,根据温度量的缓变特性,增加递推平均滤波环节,进一步加强滤波效果。温度采集模块流程如图4所示。
为了保证控温效果和控温周期,各个回路的加热时间计算和输出都要求及时准确,所以这部分工作应该在定时器中断中完成。对于每一路控温回路,根据当前控温回路的温度值和设定温度的关系决定下一周期的加热时间。通常将控温周期等分成若干个时间片,根据加热时间在各个时间片内输出加热或不加热。为防止温控系统软件在轨运行期间输出异常,影响控温效果,需要在每个时间片对所有回路的加热状态输出,将异常情况的影响控制在一个时间片内。整个控温过程就是循环执行上述步骤。控温模块流程如图5所示。

图4 温度采集模块流程图

图5 控温模块流程图
以某型号控温仪为例,其含有96个控温回路,处理器采用单片机80C32[7-9],主频为12 MHz,定时器中断执行时间主要受控温回路数量影响。由于控温仪软件除了测控温功能之外,还需要与卫星进行总线通信,如果长时间处理定时器中断服务程序,可能会导致指令接收响应延迟,甚至丢失指令。在控温回路较多的情况下,可以将该程序功能再进行细化,使其分配到多个更小的时间片中,使软件既能满足执行指令要求,又能保证控温的实时性。
结 语

董婷、柴凤萍(工程师),李恺(高级工程师):主要研究方向为空间遥感相机软件设计。
猜你喜欢
物理与工程(2020年1期)2020-06-07
原子与分子物理学报(2020年5期)2020-03-17
建材发展导向(2019年10期)2019-08-24
电子制作(2016年15期)2017-01-15
饮食科学(2016年3期)2016-07-04
工业设计(2016年6期)2016-04-17
通信电源技术(2016年4期)2016-04-04
船电技术(2015年12期)2015-10-24
自动化与仪表(2014年10期)2014-02-26
环球时报(2012-02-06)2012-02-06
