
可调式人机验证模型的方案设计
2018-09-08 07:52胡建伟马忠民HuJianweiWangLeiMaZhongminWanZhen
北京汽车 2018年4期
胡建伟,王 磊,马忠民,万 振 Hu Jianwei,Wang Lei,Ma Zhongmin,Wan Zhen
可调式人机验证模型的方案设计
胡建伟,王 磊,马忠民,万 振 Hu Jianwei,Wang Lei,Ma Zhongmin,Wan Zhen
(北京汽车研究总院有限公司,北京 101300)
针对各大车企均采用的一种乘员舒适性评价验证手段人机验证模型(Seating Buck)进行研究。对相关产品调研和学习,确定可调式人机验证模型的研究方向。通过确定控制条件、模型制作等手段,完成可调式人机验证模型的方案设计和制作,使得产品在设计初期便具备合理的人机空间设计指标。研究重点是确定人机验证模型的调整方案,需要充分分析对标数据,参考对应项目的市场定位,理解对产品性能最有影响的尺寸参数,同时考虑机构的可实现性。
人机验证模型;可调式;控制边界
0 引 言
车内乘员的人机环境舒适性是自主研发的重要内容。对于乘坐舒适性的评价,可以采用物理人机空间模型,为设计改进提供重要参考依据,这种采用物理模型验证的方法已经逐步应用到各大车企产品研发过程当中[1]。
在产品前期概念阶段,大部分参数及数据都没有最终确定,产品的目标值也在频繁发生变化,此时无法通过静态的人机验证模型来进行目标值的测评和确定,无法有效地指导产品设计开发的方向[2]。为解决此问题,前期架构概念阶段的人机验证模型需要制作成主要参数可调节的型式,依据已有的对标数据和概念造型数据,确定初步目标值范围,并通过模型反复评审分析,选出最优方案,最终确定产品设计指标,使产品在设计初期最大限度保证与市场定位相符合,避免后期因指标不符合市场需求而进行颠覆性更改[3]。
1 可调式人机模型控制边界设计
通过标杆车分析测量,获得竞品车主要人机尺寸参数,在实际设计工作中,参考这些参数,确定主要人机布置指标参数,并以此作为人机验证模型的设计输入,即人机验证模型控制边界条件。
1.1 乘员布置
1.1.1 二维人体模型布置
通过初期对标分析,根据初步的地板及前围控制面,选定驾驶员踵点位置,并根据人体躯干关节角度舒适值范围,确定驾驶员乘坐相关参数,见表1。

表1 驾驶员乘坐相关参数
根据驾驶员布置位置,还应确定驾驶员H点的曲线,以控制座椅调节行程,其调节行程应覆盖第5百分位到第95百分位的H点范围。不同百分位人体对应的H点曲线按照式(1)计算。

式中,为H点到踏点的水平距离,mm;为H点到踵点的垂直距离,mm。
1.1.2 乘员乘坐空间限制边界
根据初期对标分析以及乘员初步布置方案,初步确定乘员乘坐空间的主要指标,见表2,并在控制边界中体现。

表2 乘员乘坐空间的主要指标 mm
1.1.3 驾驶员视野
根据驾驶员的坐姿参数,确定驾驶员的眼椭圆位置,并确定驾驶员视野相关限制区域,见表3。
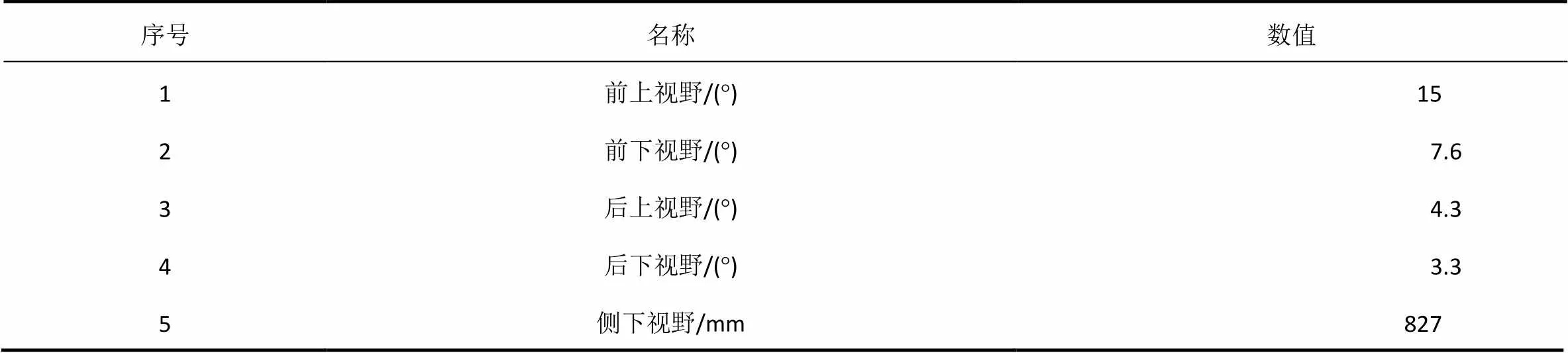
表3 驾驶员的视野限制
1.2 主要零部件布置
1.2.1 转向盘
对于转向盘的布置,应考虑转向盘与人体之间的位置关系,包括转向盘的倾角和直径,以及转向盘与驾驶员腿部的间隙等因素。表4为转向盘的主要布置参数。

表4 转向盘的主要布置参数
1.2.2 踏板组
踏板组的布置应以加速踏板为基础进行布置,因为在驾驶过程中,加速踏板的使用非常频繁,如果布置不当,则长时间操作必定会影响驾驶舒适性。
主要踏板组相关尺寸控制参数见表5。
而以股市为代表的金融市场,其主要功能在提高风险管理、信息扩散、所有权控制、资本配置等。Stulz发现,金融市场能够在投资前对该项目生产出足够的信息,并在过程中进行有效的监控(如信息披露制度设定等),从而提升研发投入,进而影响实体经济的创新。[8]Hsu et al的研究表明,在股票市场相对发达的国家,那些更依赖外部融资的企业表现出异常高的创新水平,而信贷市场相对发达的国家则无此特征。[9]

表5 踏板组相关尺寸控制参数
1.2.3 换挡操纵机构
换挡操纵机构在布置的时候,应考虑驾驶员操纵的人机舒适区域。一般来说,整个换挡操纵机构所在的区域范围应该以人体肩关节点为中心,做出的最小限制区域球面和最大限制区域球面之间的一个范围,应包含整个换挡机构各个挡位的位置包络。
SAE J833-2003中第95百分位人体的尺寸见表6,依据此数据进行控制边界最大值max和最小值min的计算,即



表6 人体尺寸参数
2 主要硬件结构的设计
对于可调式人机验证模型,可调整性是模型必备的条件。模型的设计应该保证可以准确、方便地实现所要求的调节功能,同时附带标尺,以便清晰地指示部件的位置。
2.1 踏板组调节机构
踏板组的合理布置是人机验证模型的关键部分之一,在模型中应能实现踏板组在一定范围内的调节。由于踏板组之间空间有限,无法布置下单独的调节机构,所以在验证模型中将踏板组安装在同一个平台上,蜗轮丝杆升降机可以实现向调节,升降机托起十字直线滑台,转动十字直线滑台手轮,可以实现、两个方向调节。相应的子平台安装结构如图1所示。
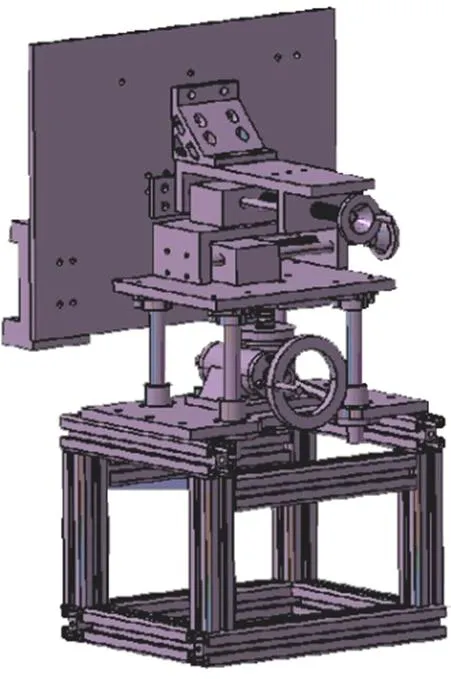
图1 踏板组子平台
2.2 座椅调节机构
一般情况下,主、副驾驶座椅的调节要求实现前后、左右和上下方向的调节;因此,采用升降机托起十字滑台安装板,实现座椅向调节,再利用丝杆调节座椅、向空间位置,如图2所示。

图2 座椅机构
2.3 门板机构
前、后门板设计为内外双层骨架,外层骨架通过铰链连接主骨架,实现旋转功能;内层骨架通过直线滑台连接外层骨架,通过调节丝杆使内层骨架在向移动,带动内门板在向平移。门板安装机构如图3所示。

图3 门板安装机构
2.4 换挡操纵安装机构
换挡操纵安装机构如图4所示,将换挡、中控扶手等部件放在同一个平台上安装,减少中控区域的机构,避免机构之间的干涉,合理利用空间。平台的调节机构与座椅调节机构相同,部件可以同步升降和平移。部件的升降高度可以通过增加垫块来调节,平移距离可以通过改变部件在平台上的安装孔位来调节。

图4 换挡操纵安装机构
2.5 转向盘调整机构
通过转向管柱的调节可以实现转向盘的调节,采用多个安装板之间的相互移动来实现管柱3个方向移动,如图5所示。

图5 转向管柱安装机构
2.6 顶棚
将顶棚悬挂在车顶上的骨架上,安装导轨和丝杆滑台可以实现顶棚上下、前后和左右的移动。
可单独调节顶棚的示意图如图6所示。为保证前、后排乘员对应的顶棚结构能够单独调节,整个顶棚设计为9块可独立调节部分,分别调节前、后排乘员头部空间及斜头部空间。

图6 顶棚调节机构示意图
2.7 模型骨架
模型骨架如图7所示,整个模型骨架选用铝型材加工制作。主要选择100mm×50 mm、50 mm×50 mm规格的矩形管。为便于活动机构的拆卸,这些机构采用螺栓与主骨架连接。子平台骨架尽量选择铝型材,常用规格为40 mm×40 mm、40 mm×80 mm、50 mm×50mm。铝型材的优点是质量轻,组装方便,可调节,强度高以及美观不生锈。
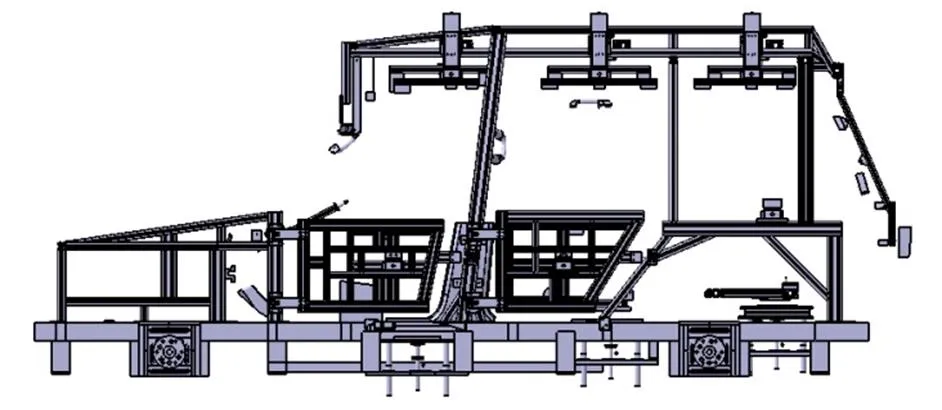
图7 模型骨架示意图
3 验证模型的制作
由于验证模型尺寸较大,结构复杂,因此整个模型的加工制作在专业的车间进行,因为模型涉及表面喷涂,所以车间环境应保证清洁卫生。制作模型的工作人员应具备职业资格,保证模型制作满足使用要求和生产安全。
模型制作主要分为2个部分,即骨架制作和内外装饰件制作,如图8所示。

图8 人机验证模型分解示意图
内外装饰件的制作应保证主要位置型面满足所需验证空间尺寸的要求,确保各区域具有型面走向特征,不需要具有特别的细节特征。在骨架制作过程中,对于未提供数据但需要验证的区域预留出更新使用的接口,如仪表板、中控台上的开关以及行李厢开口等内容。
对于承重部件,如A、B、C柱需采用代木或ABS加工,对于采用硬质泡沫加工的部件,需在安装接口位置镶嵌代木。骨架需要进行防锈处理,零部件需要进行喷涂底灰处理。喷涂材料要求安全环保,交付使用时无刺激性气味。制作完成的验证模型如图9所示。

图9 制作完成的验证模型
4 小 结
依据前期对标确定的设计指标,梳理并设计包括乘员坐姿、乘员乘坐空间、驾驶员视野和手伸及界面、整车外廓尺寸、主要零部件布置等在内的人机验证模型的相关控制条件和边界,作为可调式人机验证模型设计开发的主要依据和限制条件,指导模型的制作和应用。
同时,介绍了可调式人机验证模型总体设计思路,阐述了验证模型设计时需要注意的主要问题及需要达到的要求。着重介绍了人机验证模型主要机构的结构设计方案,讨论各个调整机构的实现方法,完成可调式人机验证模型的设计及制作。
[1]Nanxin Wang,Jian Wan,Gianna Gomez-Levi. A Parametric Approach to Vehicle Seating Buck Design[C]//ASME 2004 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. 2004:333-339.
[2]李世海,任金东,高晓娴,等.适用于乘用车人机设计验证的人机台架系统开发[J].中国机械工程,2014,4(26):559-561.
[3]Jian Wan,Nanxin Wang,Gianna Gomez-Levi. Parametric Modeling Method for Conceptual Vehicle Design[C]// ASME 2005 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. 2005:403-410.
2017-03-27
1002-4581(2018)04-0005-05
U461.4
A
10.14175/j.issn.1002-4581.2018.04.002
猜你喜欢
电子乐园·上旬刊(2022年5期)2022-04-09
南都周刊(2021年3期)2021-04-22
发明与创新·大科技(2020年6期)2020-06-22
中国新技术新产品(2020年5期)2020-05-06
读写算·素质教育论坛(2017年16期)2017-08-04
农业工程技术·温室园艺(2017年3期)2017-07-13
知识就是力量(2017年3期)2017-03-21
海外星云(2016年7期)2016-12-01
教育界·下旬(2016年4期)2016-11-19
太空探索(2016年5期)2016-07-12
