并网统一潮流控制器影响系统机电振荡模式的阻尼转矩分析
2018-09-18 04:14任必兴杜文娟王海风
电力系统自动化 2018年17期
任必兴, 杜文娟, 王海风
(新能源电力系统国家重点实验室(华北电力大学), 北京市 102206)
0 引言
中国第一台、世界第四台统一潮流控制器(UPFC)已与2015年底在江苏南京建成[1-2],世界上电压等级最高、容量最大的苏南500 kV的UPFC于2017年底在苏州顺利投运;柔性交流输电(FATCS)装置在中国华东地区的装备容量不断提升,对电网的动态影响作用凸显。作为FACTS家族中最先进的代表,UPFC能有效调节线路潮流、支撑电压、提高暂态稳定性[3-5]。目前国内外学者针对UPFC影响低频振荡的研究主要集中于UPFC附加阻尼控制改善系统弱阻尼,在UPFC的主控制回路上附加一个结构类似于电力系统稳定器(PSS)的器件是其进行阻尼优化的主要方式[6-12]。在文献[9-10]基础上,文献[11]研究了多机电力系统中装设UPFC的最佳阻尼通道选取与附加稳定器的协调设计。文献[12]提出在其多个控制回路上附加多个阻尼控制器来阻尼多模态振荡,并采用可控性指标对多个弱阻尼模态分别选择最为有效的控制回路。
阻尼转矩分析(damping torque analysis,DTA)理论主要基于发电机转子运动承受电磁转矩的物理概念,最早提出是基于单机无穷大电力系统的线性化Phillips-Heffron模型[13-14]。在此基础上,H. F. Wang团队的研究工作致力于将DTA方法推广应用于多机电力系统[15-20]。H. F. Wang早期的突破性研究工作是在Phillips-Heffron模型的基础上,将DTA法扩展到含晶闸管型FACTS装置的小规模多机电力系统[13,15],并从理论上证明了模式分析法与DTA法具有最终结果的一致性[16]。在文献[16]的基础上,文献[17]推导了适合于DTA应用于大规模实际电网的全系统线性化模型,该模型可以统一多种控制器模型并有效整合至系统模型。文献[18]构建了含储能系统的全系统线性化模型,依据阻尼转矩的产生、传递、分配及影响模态阻尼的机理,提出了基于DTA 的储能系统的安装定位、附加稳定控制通道选择及稳器参数配置的整定方法。近年来,DTA理论在新能源并网对系统小干扰稳定性影响的研究方面得到应用,文献[19-20]分别构建了含双馈感应发电机(DIFG)的多机系统Philips-Heffron模型与全系统线性化模型,应用DTA主要分析了DIFG功率出力与不同控制策略对系统机电模式的影响。
FACTS装置附加阻尼控制改善系统弱阻尼已取得理论共识,但是含电压源换流器(VSC)的FACTS装置自身并网特性对系统小干扰稳定性的影响研究尚不深入。为更进一步研究并网UPFC对系统机电模式的动态影响,本文新建立的含UPFC的多机电力系统“闭环控制系统”型线性化状态空间模型,将UPFC在电力系统中视为多输入—多输出的“功率—电压”型反馈控制器。在该模型的基础上,构建了含UPFC的全系统线性化模型,应用DTA理论量化分析了UPFC与系统的动态交互对机电振荡模式的影响。采用经典的新英格兰算例系统,详细分析了UPFC稳态潮流调节、UPFC控制系统动态特性对系统机电模式的影响,非线性仿真验证了所得结论的正确性。
1 含UPFC的多机电力系统“闭环控制系统”型线性化状态空间模型

图A1中:Pj+jQj(j=1,2)为UPFC与系统的功率交换;Vj和θj(j=1,2)分别为UPFC与系统关联节点电压的幅值与相角。UPFC动态模型主要包含UPFC(5阶动态方程)与其VSC控制系统(8个比例—积分(PI)控制器),详见附录B。UPFC线性化状态空间模型可表示为如下形式:
(1)

系统(不含UPFC)的线性化状态空间模型为:
(2)
式中:Ag为状态矩阵;Bg为输入矩阵;Cg为输出矩阵;Dg为反馈矩阵;ΔXg为系统的状态变量;ΔXg为系统状态变量。
由式(1)和式(2)可知,UPFC与系统同步机之间的动态交互可以分为两个环节:一是系统响应UPFC输入功率而改变关联节点电压,形如式(2);二是UPFC响应关联节点电压变化而改变输出功率,形如式(1)。联立式(1)和式(2)可得含UPFC的全系统闭环线性化状态空间方程为:
(3)
式中:As为系统闭环特征矩阵。
UPFC影响系统机电模式有两个主要因素:①UPFC调节线路潮流从而改变系统的潮流分布,进而影响系统机电模式;②UPFC控制系统的动态特性与系统产生的动态交互作用。通过模式分析法计算矩阵As的特征值,可以得出UPFC对系统机电振荡模式的影响,但这是上述两因素共同作用的结果,无法描述分析UPFC如何影响机电模式,更无法分析上述两个因素对于系统机电模式的独立影响。因此,本文提出一种“闭环控制系统”型状态空间模型,在该模型基础上应用DTA理论量化评估UPFC装置对系统机电模式的影响。
UPFC与系统的功率交换是其动态交互的物理成因。定义Pj0+jQj0(j=1,2)为系统稳态运行时UPFC注入系统的功率,满足:
Pj+jQj=Pj0+jQj0+ΔPj+jΔQjj=1,2
(4)
ΔPj+jΔQj(j=1,2)表征了UPFC与系统的动态交互。
式(2)亦可表示为如下形式:
(5)
(6)

式(5)中,本文借鉴全系统建模思路[11,18,20],将式(2)中系统状态变量ΔXg按照“Δδ-Δω-ΔZ”的顺序重新排序。
由式(1)可得出UPFC输出功率和电压的关系为:
ΔEPQ=[Cu(sIu-Au)-1Bu+Du]ΔEVθ=H(s)ΔEVθ
(7)
式中:Iu为与Au同维的单位矩阵。
式(7)表明,UPFC在系统中可视为多输入—多输出的“功率—电压”型反馈控制系统。
将式(6)代入式(7),可得:
ΔEPQ=[(I-H(s)Dg)-1H(s)Cg]ΔXg=
(8)

式(5)至式(8)构成含UPFC的多机系统“闭环控制系统”型线性化模型,如图1所示。

图1 含UPFC的全系统“闭环控制系统”型线性化模型Fig.1 “Closed-loop control system” type of linearized model for multi-machine power system with UPFC
2 UPFC并网对系统机电模式的DTA
由图1可知,UPFC输出功率到系统机电回路的阻尼转矩贡献可表示为:

(9)
由图1和式(9)可得出UPFC对多机系统的机电回路的阻尼转矩贡献为:
ΔTu=ΔTP1+ΔTQ1+ΔTP2+ΔTQ2=
GP1(s)ΔP1+GQ1(s)ΔQ1+
GP2(s)ΔP2+GQ2ΔQ2
(10)
因此,UPFC对第j台同步机的机电回路的阻尼转矩贡献为[18-20]:
ΔTuj=gP1j(s)ΔP1+gQ1j(s)ΔQ1+
gP2j(s)ΔP2+gQ2j(s)ΔQ2
(11)
式中:gP1j,gQ1j,gP2j,gQ2j分别为GP1,GQ1,GP2,GQ2各自第j个元素。
定义模态λi和向量νi(i=1,2,…,n)分别为式(5)中特征矩阵的特征值与右特征向量,依据线性控制理论,图1所示的闭环控制系统满足如下关系:
(12)
式中:αi为运算系数;νig为νi中与ΔXg对应的向量;νij为νi中与Δωj对应的元素。
假设只关心UPFC对模态λi提供的阻尼转矩,即只关注λi的可控性,则可选取初值:
aj=0j=1,2,…,i-1,i+1,…,n
(13)
联立式(8)、式(12)和式(13),且s=λi时满足:
(14)
将式(14)代入式(11),可得[18,20]:
gQ1j(λi)γ2(λi)+gP2j(λi)γ3(λi)+
(15)
式中:Re(·)表示复数的实部;Mj为第j台同步机的惯性常数。

(16)

由式(15)和式(16)可知,UPFC对系统目标模式的影响为:
(17)
式(17)表明,UPFC对目标模态动态影响可分为两部分:一是UPFC向每台发电机所提供的阻尼转矩,二是各台发电机获得的阻尼转矩对目标模态的响应灵敏度。详细的阻尼传递分配过程如附录A图A3所示。由图A3可知,DTA方法可以清晰解释并网UPFC阻尼转矩的产生、传递、分配及影响模态阻尼的机理。

女人进罗兰金店的时候,天色已经悄然暗了下来。凌州大道上的路灯,长长的一排沿街站着,像一长串的金色灯笼挂过去。路灯如一朵朵太阳,在夜幕中泻下一片片昏黄的阳光。
(18)
式(18)表征了UPFC并网对系统机电模式的影响可分为两部分:λi为仅考虑UPFC稳态潮流调节时系统的机电模式,Δλi为该稳态工况下UPFC动态特性对系统机电模式的影响。
3 算例分析
3.1 算例系统介绍
算例为新英格兰10机电力系统,其结构如附录A图A4所示,同步机组模型采用计及励磁的四阶经典模型[13]。算例系统可分为3个区域:区域A中的有功功率通过线路2-1,2-3,26-27送达区域B,区域C只包含第10号机(外部等值机),UPFC安装在线路2-1上调节区间A与B之间的潮流。系统存在9个机电振荡模式,本文选取其中具有一定代表性的2个模式作为研究对象:①区间模式λ1为C区域10号机与A和B区域其他机组振荡;②区内模式λ2为区域A与区域B的机组振荡。
3.2 UPFC潮流调节对机电模式的稳态影响
UPFC可独立调节有功功率和无功功率,但实际工程中主要考虑UPFC有功调节,无功调节维持在较低水平。因此本文研究主要考虑UPFC有功调节变化对于机电模式的影响。有功调节范围设定在0.5~5(标幺值),无功调节一般维持在较低水平,本文算例将无功调节按照有功调节的20%计算,UPFC参数取值对应为附录A表A1的算例A情形。振荡模式随UPFC潮流调节变化的轨迹如图2所示。图2中,UPFC对系统机电模式的影响可分为两部分:①UPFC通过改变稳态潮流分布而影响机电模式,形如图中λi(i=1,2)的轨迹变化;②UPFC与系统同步机的动态交互对机电模式的影响,形如图2中Δλi(i=1,2)的轨迹变化。

3.3 UPFC控制参数变化对机电模式的动态影响
由附录A图A2可知,UPFC采用内、外双环控制结构。外环控制可实现4个控制目标,即并联VSC可控制直流电容电压和支撑节点交流电压,串联VSC可控制线路功率;内环为电流控制器,本文主要关注机电振荡环节,忽略电流内环响应。本节应用DTA理论量化分析UPFC控制器动态特性对目标机电模式的动态交互影响。附录A图A5(a)和 (b)分别为直流电压、交流电压和功率(有功和无功参数设置相同)三类控制器的PI参数变化对模式λ1和λ2的影响,UPFC调节潮流设定值为3+j0.6(标幺值)。
由附录A图A5(a)和 (b)可知,随PI参数变化时,不同类型控制器对机电模式的动态影响各不相同。其中,交流电压控制器对机电模式的影响最弱,而功率控制器对机电模式的影响最强。对于功率控制器,随着PI参数变化时,模式λ1和λ2的DTA量化分析结果均出现了“DTA峰值”(λ1尖峰点处相关结果详见表1中算例C,λ2尖峰点处相关结果详见图A5(b)),尖峰点处UPFC对机电模式的动态交互影响最强。对于直流电压控制器,在一定的PI参数取值范围内,较低频率的区间模式λ1会出现“DTA峰值”情况(λ1的DTA峰值点处相关结果详见表1中算例B),如图A5(a)所示;而较高频率的区内模式λ2并未出现“曲面尖峰”情况,表明直流电压控制器对λ2的影响较小。

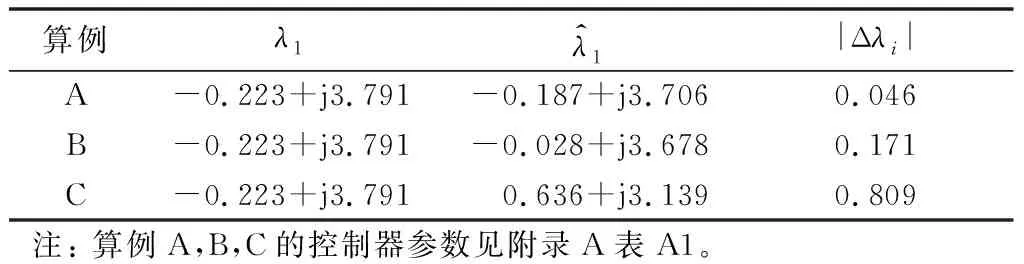
表1 UPFC动态特性对模式λ1的交互影响Table 1 Impact of interaction affected by dynamic characteristics of UPFC on λ1

对比表1、表2中算例B和算例C,得出串联VSC相比并联VSC,其对机电模式阻尼的恶化更为严重。本文主要考虑UPFC有功调节,无功设定值较小,由于并联VSC从系统吸收少量有功维持内部功率平衡;而串联VSC作为核心功能,调节线路有功潮流,其与系统的有功交互程度明显强于并联VSC。附录C对式(7)中UPFC的传递函数进行了扩展,式(C1)中与有功控制相关的子函数为hP1V1(s),hP2V2(s)和hP2θ2(s);其中,hP1V1(s)主要与并联VSC相关,hP2V2(s)和hP2θ2(s)主要与串联VSC相关。对应算例B和算例C控制器的参数取值,上述子函数在低频范围内(0~5 Hz)的频率响应曲线如附录A图A6所示。由图A6可知:①算例B参数取值下与并联VSC相关的|hP1V1(s)|的峰值对应频率接近λ1的频率,明显强于|hP2θ2(s)|;②算例C参数取值下,|hP2V2(s)|与|hP2θ2(s)|的峰值接近λ1的频率,由于并联VSC参数取值与算例A相同,因而算例C中|hP1V1(s)|的峰值比在算例B中要小;③通过比较算例B下|hP1V1(s)|与算例C下|hP2V2(s)|和|hP2θ2(s)|峰值的大小,得出串联VSC的响应峰值要明显高于并联VSC的响应峰值,使得式(7)中UPFC与系统的动态交互增强,辅证了串联VSC与系统的动态交互要强于并联VSC。
下面通过非线性时域仿真来验证上述结论。系统故障设置为节点8处负荷在1 s时突减80%,1.1 s后故障清除,时域仿真结果如附录A图A7所示。由图A7可知,相比算例A,算例B情况下并联VSC动态作用弱化了系统阻尼;而算例C情况下串联VSC动态作用对系统的恶化程度更为严重,导致整个系统在仿真5 s后“失稳”。
3.4 UPFC潮流调节对机电模式的动态影响
由3.3节分析可知,在特定UPFC潮流调节工况下(3+j0.6),若VSC参数调节失当,区间模式λ1的DTA量化分析结果出现了“峰值”,其中串联VSC对λ1的恶化程度最为严重。在此基础上,本节针对UPFC潮流调节变工况下均可能出现的“DTA峰值”,重点研究串联VSC对区间模式λ1的影响。UPFC有功调节范围设定为1~3,无功调节仍按照有功调节的20%取值。变潮流调节工况下,各工况的“DTA峰值”结果见图3。由图3可知,随UPFC潮流调节的增加,各潮流调节工况下所对应的“峰值”不断增大,串联VSC对机电模式阻尼的恶化不断加剧。

图3 多工况下DTA计算结果(区间模式)Fig.3 Computing results of DTA under multi-operation condition (inter-area oscillation mode)
下面通过非线性仿真来验证本节所得结论,系统故障设置与3.3节相同,时域仿真结果如附录A图A8所示。图A8中,由于UPFC潮流调节值改变,导致整个系统潮流发生变化,因而系统功角曲线的初值结果各不相同。由图A8可知:随着UPFC潮流调节增加,当串联VSC参数调节失当出现前文所述的“DTA峰值”情况时,同步机功角振荡不失稳,其中当有功调节为1.0时,功角曲线出现小幅振荡;当有功调节为1.5时,功角振荡有所加剧;当有功调节为2.0时,功角曲线发生持续性振荡;而当有功调节分别为2.5和3.0时,整个系统分别在运行7 s后与运行5 s后出现“失稳”。上述规律与图3所得结论相符。
3.5 UPFC安装地点对于系统机电模式的影响
由图2可知,当忽略UPFC动态特性仅考虑UFPC的稳态潮流调节时,UPFC不同安装位置对系统区间和区内模式的影响都比较小;当UPFC控制参数取值合理时(算例A),UPFC的动态特性对机电模式的动态影响仍比较小。
由3.3节和3.4节分析可知,当UPFC的串联VSC控制参数调节不当导致出现“DTA峰值”时,UPFC对机电模式的动态影响很强,本节重点考虑UPFC不同安装位置下,串联VSC对机电模式的强动态影响,串联VSC对系统区间模式和区内模式的“DTA峰值”计算结果见表2。

表2 目标模式的DTA峰值Table 2 DTA peak value of target modes
由表2可知:当UPFC定位线路26-27时,UPFC对区内模式的影响弱于区间模式;当UPFC定位线路2-1时,结果正好相反。区间模式的主振机组为10号机与其他机组,区内模式的主振机组为9号机与5号机,由此可知,UPFC安装位置距离主振机组越近,串联VSC参数失调出现“DTA峰值”时UPFC对机电模式的影响越强。同步机功角曲线如附录A图A9所示,非线性仿真结果验证了表2分析的正确性。
4 结语
本文新建立了一种含UPFC的多机电力系统“闭环控制系统”型线性化状态空间模型。应用DTA理论,量化分析了UPFC潮流调节、UPFC控制器动态特性对机电模式的影响。基于本文算例,得出如下结论。
1)UPFC稳态潮流调节(忽略UPFC动态)对机电模式的影响较小;当考虑 UPFC动态特性时,若UPFC控制参数合理,随着UPFC潮流调节的增加,UPFC对机电模式的动态影响有所加强,但整体影响依旧不大。
2)并联VSC电压控制对机电模式的影响较弱;串联VSC功率控制对机电模式的影响较强,控制参数失调容易导致本文所述的“DTA峰值”,表现为UPFC对机电模式的强动态影响。
3)UPFC调节线路功率越大,出现“DTA峰值”时UPFC对机电模式的影响越强;UPFC安装位置越接近目标模式的主振机组,出现“DTA峰值”时UPFC对机电模式的影响越强。
本文基于DTA方法与常规特征值方法在结果上相近,还可以考虑稳态和动态两个方面各自的单独影响,可作为常规模式分析法的有效补充。本文研究主要针对单台UPFC对系统机电模式的影响,实际华东电网中含有多台UPFC装置,因此,下一步的研究方向为复杂电力系统中多台UPFC之间、UPFC与近区高压直流间的动态交互评估。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。
(编辑孔丽蓓)
猜你喜欢
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
足球周刊(2016年14期)2016-11-02
足球周刊(2016年15期)2016-11-02
足球周刊(2016年10期)2016-10-08
数学物理学报(2016年6期)2016-04-16
中国学术期刊文摘(2016年2期)2016-02-13
新乡学院学报(2015年6期)2015-11-06
Coco薇(2015年1期)2015-08-13