产品运输的响应系统的优化
2018-09-22 04:15陈金宇叶文斌东莞理工学院机械工程学院黄市生曾志彬吴国洪东莞市横沥模具科技产业发展有限公司罗鸿彬东莞市朝茗机电科技有限公司
数码世界 2018年8期
陈金宇 叶文斌 东莞理工学院 机械工程学院 黄市生 曾志彬 吴国洪 东莞市横沥模具科技产业发展有限公司 罗鸿彬 东莞市朝茗机电科技有限公司
0 前言
随着科学技术的不断进步,工业生产已经进入自动化、智能化的时代,自动化生产成为当前工业生产发展中的必然趋势,在自动化生产中,无论是单机还是组合机床,在对部分工序进行处理时,都会用到机械手来辅助完成,因此对于机械手的控制也就成为影响生产质量的质量和效率的关键因素,需要相关技术人员的重视。
在工业自动化进程中,生产与包装都趋向于全自动化,从原料到成品的这个过程需要很多道加工工序,在自动化过程中,机械手扮演了非常重要的角色。机械手能模仿人类手臂的某些功能动作,可以按照预先设置好的固定程序,对工件进行抓取、搬运,甚至装配等,或者对工具进行操作。机械手可以说是最早的工业机器人,可以代替人工进行繁重或者重复的劳动,不仅可以提高生产效率,实现生产的自动化和机械化,还可以有效保护工作人员的人身安全,因此,在机械制造,冶金,电子等多个领域和部门得到广泛应用。搬运机械手是在智能物流装备中被广泛应用的一种工业自动化产品。众多机械手通常被用来抓取与移栽物体,有些零件体积较小,并且对表面有一定的要求,采用普通的刚性机械爪抓取易导致零件变形或刮花零件表面。并且现有的一些机械手的结构设计比较复杂,传动效率低,在抓取移栽小型零件时表现出移栽速度慢的缺点。利用电机驱动的机械手是一种典型的机电一体化设备,具有着响应速度快、控制精度高、安装方便等优点。
为提高抓取移栽效率、并且保证工件表面的质量,本文拟设计一种快速抓取移栽机构,大致为利用一个伺服电机驱动,通过摆动机构与U型槽,结合气动吸盘,实现快速抓取移栽工件。下文将从机构设计方面与系统控制方式方面进行阐述。
1 硬件平台设计
根据设计要求,本文所设计的抓取移栽机构包括轴座和与轴座相连接的伺服电机,伺服电机设置在轴座的后表面。轴座下方设置有底板,轴座的后表面还设置有肋板,肋板进一步与底板相连接,以加固整体结构。该抓取移栽机构还包括二爪卡件和摆件,二爪卡件设置在伺服电机的输出轴末端,且与摆件相连接,二爪卡件和伺服电机通过键连接,二爪卡件和摆件通过螺钉连接。轴座的前表面设置有型槽机构,摆件和型槽机构之间设置有导向螺钉,U型槽机构的正表面上下方对称设置有导轨和与之相配套的滑块,滑块的正表面分别设置有载板Ⅰ和载板Ⅱ,载板Ⅰ位于载板Ⅱ的上方。载板Ⅰ和载板Ⅱ的前表面共同设置了载板Ⅲ,载板Ⅲ的侧面的凹型槽设置了卡件,卡件通过螺钉分别与载板Ⅰ和载板Ⅱ连接。载板Ⅲ的中间位置与导向螺钉相连接,受导向螺钉的作用,载板Ⅲ相对于导轨可左右运动,载板Ⅲ相对于载板Ⅰ和载板Ⅱ可上下移动。
本文所设计的抓取移栽机构还包括载板Ⅳ和移栽爪,载板Ⅳ设置在载板Ⅲ的下方,且与移栽爪相连接。载板Ⅳ与载板Ⅲ、载板Ⅳ与移栽爪均通过螺钉连接。该抓取移栽机构还包括挡片和限位开关,挡片设置在载板Ⅰ的上方,限位开关设置在轴座的上方,该限位开关是一种光电开关,利用挡片在手爪移动的过程中遮挡光电开关的激光发接过程从而获知机械手经过相应的工位点,限位开关共有三个,均通过螺钉固定连接,用于定位三个工位点。
本文所设计的快速抓取移栽机构的电性连接部分,一号限位开关的一端连接PLC 的1.00接口,另一端连接PLC 的com-接口,二号限位开关的一端连接PLC 的1.01接口,另一端连接PLC 的com-接口,三号限位开关的一端连接PLC 的1.02接口,另一端连接PLC 的com-接口。PLC 的100.00接口连接一个2.2k的电阻,再进一步连接伺服驱动器的Puls+接口。PLC 的100.02接口连接一个2.2k的电阻,再进一步连接伺服驱动器的Dir+接口。伺服驱动器的Puls-接口与Dir-接口相连接,进一步与伺服驱动器的com-接口连接。伺服驱动器的U、V、W、GND接口分别与伺服电机的红、白、黑、黄线连接。伺服驱动器的L1接口与L1C接口相连接,进一步与单相
交流220V电源的火线连接。伺服驱动器的L2接口与L2C接口相连接,进一步与单相交流220V电源的零线连接。
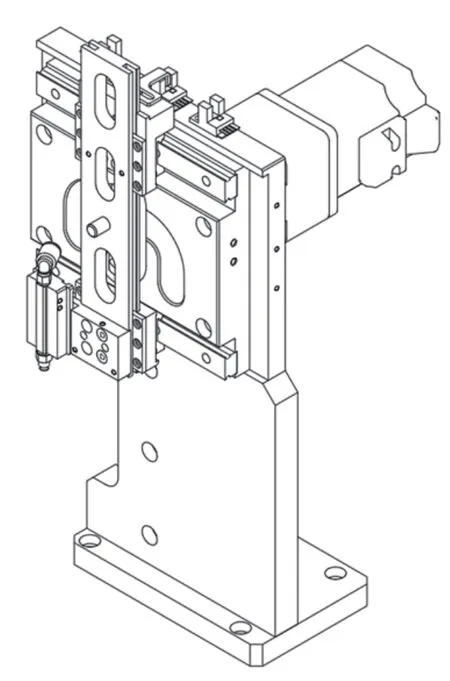
图1 机构设计图
2 控制方式
电机的末端与设置有导向螺钉的摆件连接,利用一个电机驱动,并通过导轨与滑块、载板Ⅲ与卡件的传动方式,使得移栽爪做U型移动。具体地,电机动作时,通过二爪卡件带动摆件动作,进而通过导向螺钉带动载板Ⅲ沿着U型槽机构运动,配合限位开关的作用,实现移栽爪具有三个不同的工位点,当挡片经过任一限位开关时,电机停止一定的时间,直到移栽爪在该工位完成动作,当挡片经过左右两边的限位开关时,电机还会改变转向,结合吸盘动作,实现抓取与移栽物体。
3 结语
本文所做的工作为根据功能的要求设计了一种快速抓取移栽机构及控制系统。利用伺服电机驱动,并通过导轨与滑块、载板Ⅲ与卡件的传动方式,使得移栽爪在三个不同的工位点上做U型移动。结构简单,能提高传动效率,移载速度快;移载爪为真空吸盘,可抓取多类小零件,并且不会在抓取时导致零件变形或零件表面被刮花。
猜你喜欢
北华大学学报(自然科学版)(2021年3期)2021-07-13
上海工艺美术(2021年4期)2021-04-24
发明与创新·中学生(2020年1期)2020-08-03
电脑爱好者(2020年6期)2020-05-26
少年漫画(艺术创想)(2019年10期)2019-04-20
少年漫画(艺术创想)(2019年12期)2019-04-20
数码世界(2018年3期)2018-12-22
电子制作(2018年17期)2018-09-28
北京航空航天大学学报(2017年5期)2017-11-23
燕山大学学报(2015年4期)2015-12-25