智能调节产品角度的系统的开发
2018-09-22 04:15罗鸿彬罗男生东莞理工学院机械工程学院黄市生曾志彬吴国洪东莞市横沥模具科技产业发展有限公司
数码世界 2018年8期
罗鸿彬 罗男生 东莞理工学院机械工程学院 黄市生 曾志彬 吴国洪 东莞市横沥模具科技产业发展有限公司
1 前言
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。机械手可以代替人工进行繁重或者重复的劳动,不仅可以提高生产效率,实现生产的自动化和机械化,还可以有效保护工作人员的人身安全。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术领域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用[1]。
现有的旋转机械手一般都是以旋转气缸或电机为驱动件[2],然而使用旋转气缸驱动的旋转机械手不具有任意调角度的功能,不适合应用在旋转角小于90°的多种场合[3];使用电机驱动的旋转机械手固然能任意调角度,但电机的使用增加了成本,并且需要控制器控制,使用起来较复杂[4]。
针对以上问题,本文探讨加工角度在智能制造行业的重要性及应用示范,大致为通过一个直线推杆气缸带动传动件在指定导轨上运动,从而带动气爪最大产生90°的旋转,通过调节螺钉控制直线推杆气缸的行程进而实现在0-90°范围内任意调节气爪所需要的旋转角度,从而实现到达目标位置夹放物体,满足0-90°旋转范围内任意角度抓取物体。下文将具体从机构设计方面与软件系统搭建方面进行阐述。
2 硬件平台设计
本文所设计的机械手结构如图1所示,包括有连接组件、驱动件、传动件和执行件,其中连接组件包括有底板、支撑板、缸块连接件、限位螺钉、螺钉固定件、连杆、带轴承的轴座、方块、气爪连接板;驱动件包括有气缸、气爪;传动件包括有导轨、导轨滑块、U型槽板、限位块、导向螺钉、带法兰的转轴;执行件为手指。
底板的两侧设置了支撑板,两者通过螺钉连接固定,支撑板共有两块,右侧的支撑板设置了气缸和带轴承的轴座,左侧的支撑板只设置了带轴承的轴座。气缸的正表面设置了导轨和导轨滑块,气缸的杆体通过缸块连接件与导轨滑块连接,气缸的侧面设置了螺钉固定件,进一步的,限位螺钉与螺钉固定件螺纹连接。限位块设置在导轨滑块的侧面,U型槽板设置在导轨滑块的正表面。导向螺钉设置在U型槽板的U型槽里,导向螺钉与连杆螺纹连接,连杆与带法兰的转轴连接,通过连杆侧面的紧定螺钉锁紧。带法兰的转轴通过带轴承的轴座固定在支撑板的正表面,带法兰的转轴、带轴承的轴座呈左右对称设置,方块设置在两个带法兰的转轴的中间,方块与转轴的法兰通过螺钉连接。气爪设置在方块的上方,两者通过气爪连接板进行连接,手指设置在气爪的末端。此外,通过如下设计来实现限位螺钉在气缸上的竖直上下移动:限位螺钉通过螺钉固定件与气缸固定连接,限位螺钉与螺钉固定件通过螺纹结构固定连接。通过螺纹对限位螺钉的位置高度进行调节,从而调控限位螺钉和限位块之间的高度差,控制气缸的行程,进而控制旋转的角度。工作情况具体为,当气缸的杆体上移(下移)时,带动导轨滑块上移(下移)进而带动U型槽板也上移(下移),U型槽板的上移(下移)带动导向螺钉向槽内(槽外)移动,带动连杆摆动,从而机械手旋转,其中,当气缸的杆体处于收缩情况,气爪处于竖直方向,当气缸的杆体伸长时,气爪顺时针摆动,当气缸的杆体缩短时,气爪逆时针摆动;导轨滑块上移同时带动限位块上移,限位块的上移将会碰到限位螺钉,通过调节限位螺钉在螺钉固定件下方的长度来调节气缸的行程,进而调节导向螺钉向U型槽内移动的距离,连杆摆动的幅度,进而调节机械手旋转角度。
通过气缸和导向螺钉的配合作用来实现机械手在0~90°范围内的任意角度旋转。首先,气缸驱动导轨滑块在导轨上竖直方向往复运行,从而带动U型槽板竖直运动,实现导向螺钉在U型槽内旋进或旋出,进而通过连接杆带动方块及方块上的手指旋转,实现机械手的正向或反向水平旋转。旋转的角度可通过气缸的行程进行控制,一般情况下0~90°下均可实现。另一方面,通过限位螺钉和限位块的设计,可对气缸行程进行控制,进而调控连杆摆动的幅度和机械手旋转的角度;由于限位螺钉的高度可调节,即可在任意合适范围内控制气缸的行程,实现任意特定角度的旋转。同时机械手通过气爪驱动手指松开或抓紧,实现物体的抓取。
本文所设计是硬件平台,总结来说就是由连接组件、驱动件、传动件和执行件组成。其能实现角度可调主要是通过螺纹对限位螺钉的位置高度进行调节以及通过气缸和导向螺钉的配合作用,从而调控限位螺钉和限位块之间的高度差,控制气缸的行程,进而控制旋转的角度,来实现机械手在0~90°范围内的任意角度旋转。
3 结语
基于上述一种基于可调角度旋转机械手的设计,本文所做的工作总结如下,根据功能的要求对机械手进行了结构设计,主要利用气缸带动U形导轨的作用,使得机械手可实现大范围的角度旋转,既可实现大角度范围的旋转,也可实现0~90°小角度范围的旋转,且可任意调节旋转的角度,结构简单,解决了目前没有可以调角度机械手的空白,实现了机械手在0-90°旋转范围内任意调节所需要的旋转角度,满足该旋转范围内任意角度的抓取物体。
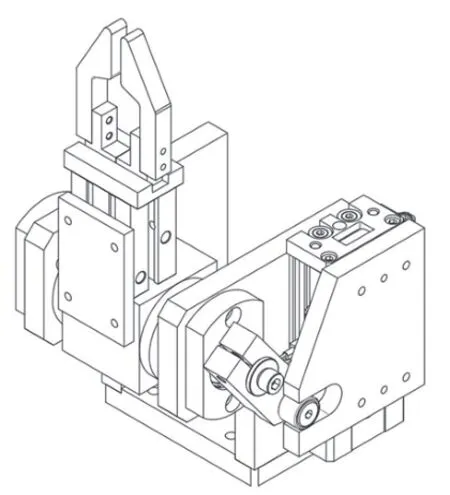
图1 硬件结构设计图
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生理科应试(2021年10期)2021-12-07
机电工程技术(2021年3期)2021-09-10
电子制作(2019年13期)2020-01-14
轻兵器(2019年8期)2019-08-30
环球时报(2019-07-18)2019-07-18
船舶标准化工程师(2018年3期)2018-09-12
现代职业教育·中职中专(2018年7期)2018-05-14
科技创新导报(2016年4期)2016-11-19