
一种凸极式永磁同步电机闭环MTPA控制策略研究*
2018-10-09 07:05蔡国庆姚文熙
机电工程 2018年9期
蔡国庆,姚文熙,章 玮
(浙江大学 电力电子技术研究所,浙江 杭州 310027)
0 引 言
在众多可用于电动汽车驱动的电机中,永磁同步电机(PMSM)以其结构简单、运行可靠等显著优点,成为国内外学者研究的热点,尤其是具有优异调速性能的凸极式永磁同步电机(IPMSM),已经广泛应用于电动汽车驱动系统的开发之中[1]。
IPMSM因磁路的不对称可以产生额外的磁阻转矩,为了充分利用磁阻转矩,减小铜损,通常采用最大转矩电流比(MTPA)控制。为了实现MTPA控制,文献[2]中利用电机参数直接计算MTPA工作点,但是电机参数受温度、磁饱和等因素的影响而变化[3],为了提升系统的鲁棒性,相关学者提出了几种改进的MTPA实现策略。文献[4]提出了一种非线性的磁链模型,拟合MTPA轨迹;文献[5]采用参数辨识得到更准确的参数,但计算量大、系统复杂;文献[6-8]中采用高频信号注入法,与电机参数无关,是现在研究的热点;文献[9]中查表法因结构简单,易于实现而在工程中被广泛采用。
但是,上述几种方法没有考虑电流动态跟踪特性。如果电机给定转矩突变,引起电流调节器输出电压饱和,会使电流控制器短时间内失控。对此,文献[10]提出了一种基于电压反馈调节的电流控制策略,在电压饱和时负向补偿d轴参考电流。该方法提升了转矩响应速度,但实际电流轨迹会脱离MTPA曲线。
为了实现永磁同步电机在基速以下工作,转矩突变时,电流动态跟随过程中的MTPA状态,提升系统稳定性,本文将提出一种闭环修正方式,并通过Matlab验证该方法的可行性。
1 IPMSM数学模型
建立d-q轴同步旋转坐标系。在基于转子磁场定向的矢量控制系统中,将d轴定位于转子磁链方向[11],则IPMSM在该坐标系下的数学模型如图1所示。
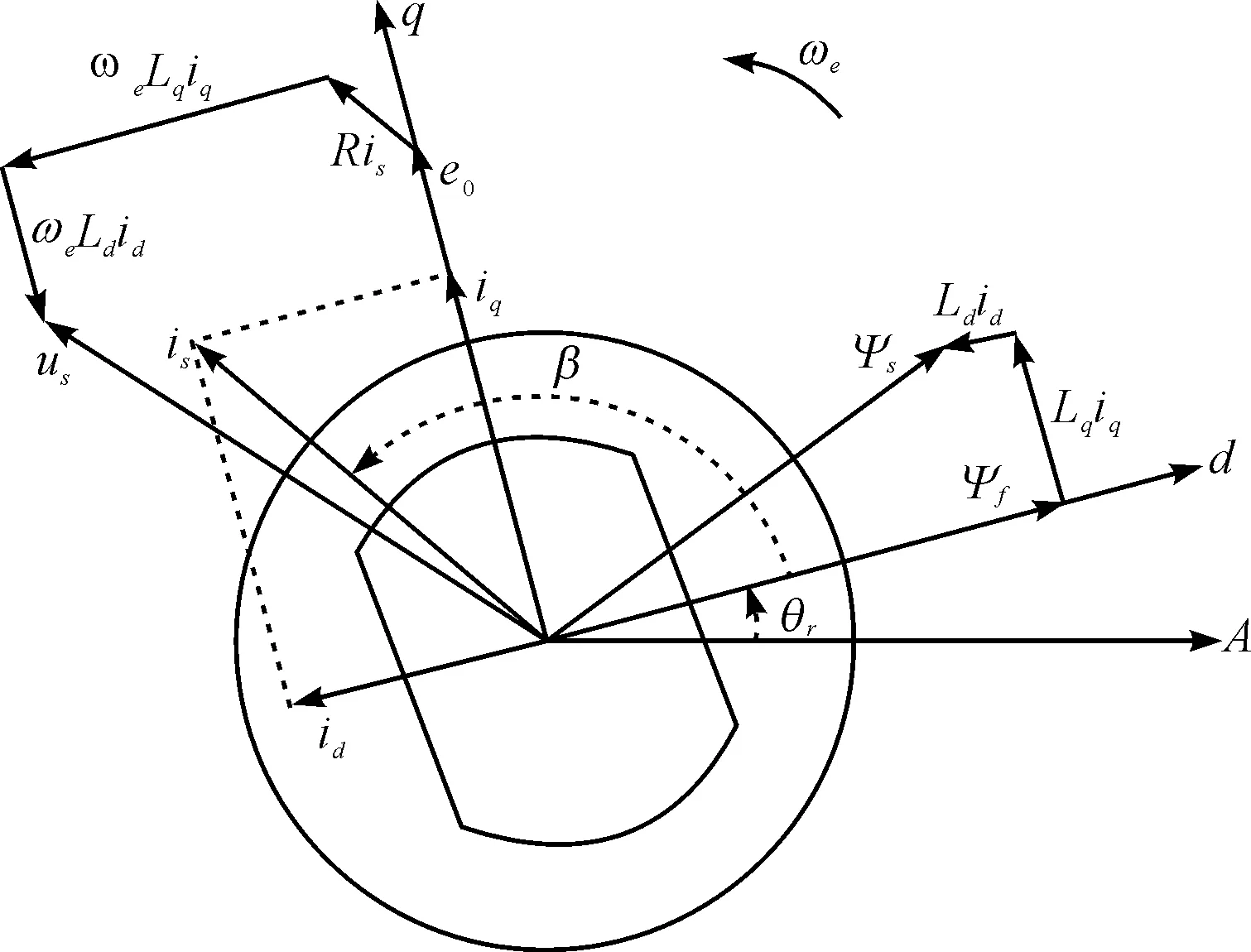
图1 同步旋转坐标系下IPMSM的稳态矢量图
在d-q同步旋转坐标系下,凸极式永磁同步电机定子电压方程可表示为:
(1)
式中:ud,uq—d-q轴定子电压分量;id,iq—定子电流分量;Ld,Lq—d-q轴等效电感;R—定子电阻;ed,eq—d-q轴耦合反电动势。
其值可表示为:
ed=-ωeLqiq
eq=ωe(ψf+Ldid)
(2)
式中:ωe—同步旋转坐标系下的电角频率;Ψf—转子永磁体磁链值。
IPMSM的转矩方程与运动方程如下:
(3)
(4)
式中:Pn—电机极对数;Te—电机输出电磁转矩;TL—负载转矩;ωm—电机机械角频率;B—机械摩擦系数;
2 MTPA控制
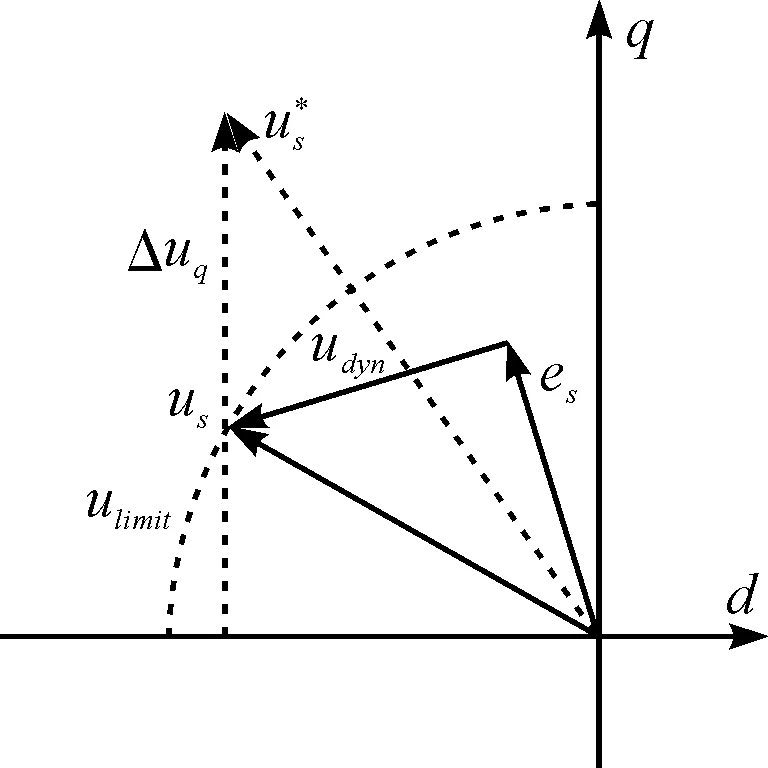
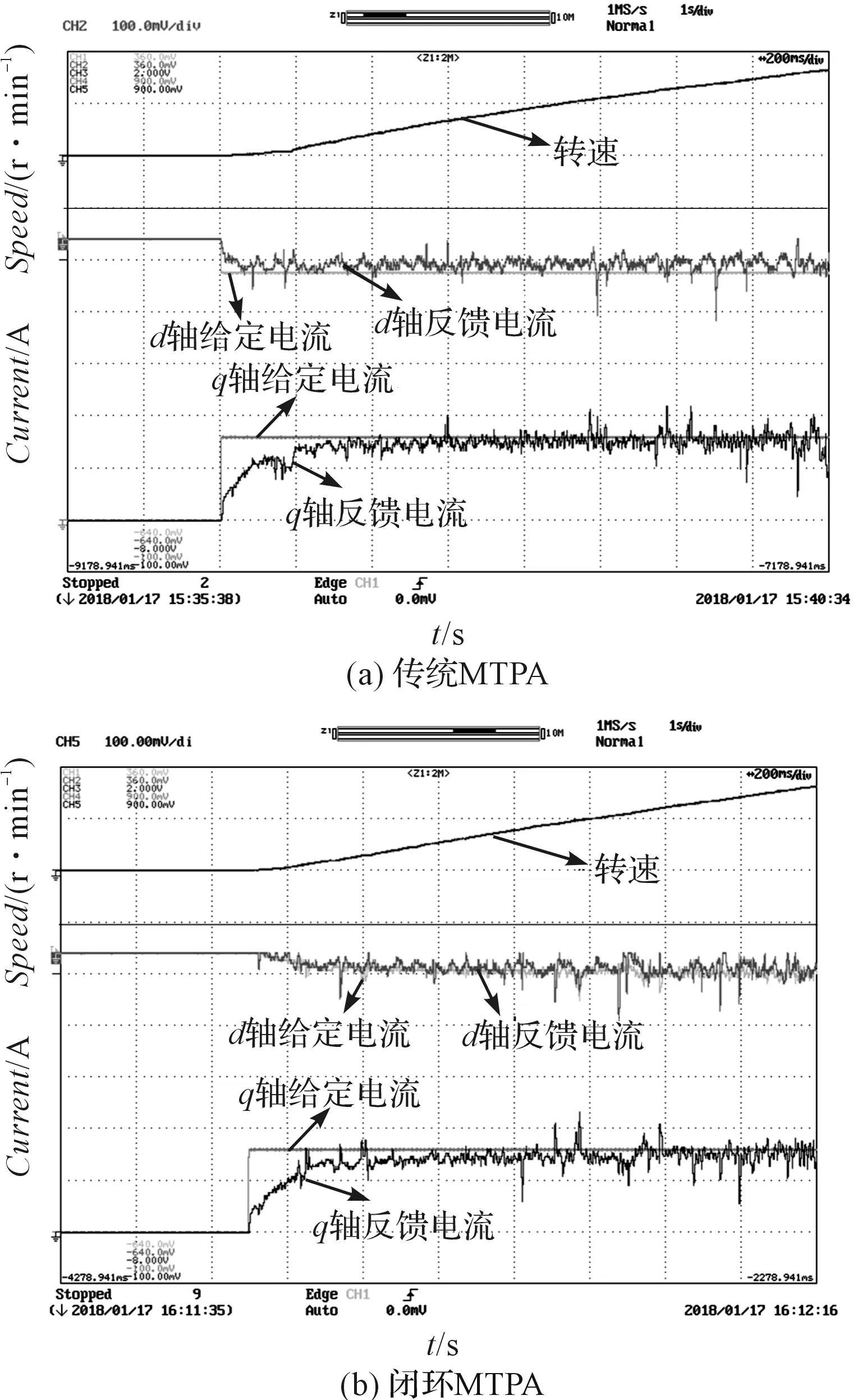
对于IPMSM,其转子为插入式结构,导致电动机气隙不均匀,有Ld 电机转速在基速以下,恒转矩区工作时,铜耗比重较大[1]。若输出转矩不变,控制定子电流分量使定子电流幅值最小,就可以减小电机损耗。 在d-q电流坐标系中,由转矩公式可以确定给定转矩对应的转矩曲线。转矩曲线上距离原点最近的点,即为该转矩下MTPA工作点,此时电流矢量幅值(距离原点位置)最小。将不同转矩曲线上MTPA点连在一起可以得到该电机的MTPA曲线。 为求MTPA曲线上d-q轴电流的关系,转矩公式可变换为: (5) 式中:Is—同步旋转坐标系下给定电流幅值;β—电流矢量角。 电流幅值不变时,求输出转矩的极值,转矩对β的微分为零,即满足公式: (6) 由式可得: (7) id|MTPA=IscosβMTPA (8) 式中:βMTPA—给定电流幅值Is不变时,对应的MTPA状态的电流矢量角;id|MTPA,iq|MTPA—对应的d-q轴电流分量。 化简上式,可以得到MTPA曲线上d-q轴电流分量满足公式: (9) 传统的MTPA控制策略,利用电机相关参数根据相关公式计算d-q轴电流分量,并分别进行闭环控制。但实际电机控制系统中,电机参数受温度、磁饱和等因素的影响而非线性变化。而直接采用公式计算还带来了很大的计算量。工程上常采用查表法,表格数据可由离线实验获得。 在双闭环矢量控制系统中,MTPA控制的基本框图如图2所示。 图2 开环查表法MTPA控制框图 由图2可知:转速调节器的输出为转矩给定,经过MTPA策略得到给定d-q轴电流给定。电流给定与反馈的差值经电流调节器(多为PI调节器)输出电压给定。理想情况下电压给定满足下式: (10) 若电压给定可由逆变器准确合成,忽略定子电阻压降,则d-q电流斜率可由公式化简为: (11) 电流环可以看成是一阶低通滤波器,稳态时无静态误差,因此满足MTPA状态。 但电流环响应需要时间,此外在实际的电机驱动系统中,逆变器输出受直流母线电压和PWM调制策略的限制。对于SVPWM调制,线性调制区,给定电压矢量被限制在正六边形的内切圆内,电流环PI控制器输出存在限幅环节。当给定转矩突变时,电流偏差较大,容易引起控制器输出电压饱和而限幅。 典型的限幅如图3所示。 图3 给定电压矢量限幅控制器输出电压矢量;es-电机反电动势矢量;us-限幅后实际输出电压矢量;Udyn-近似为d-q轴电感上电压矢量 经限幅后,实际输出电压分量减小,则由式可知d-q电流斜率减小。电流跟踪过程中,实际电流矢量就有可能脱离MTPA曲线。 为了保证动态过程的MTPA,本研究对传统的开环查表法MTPA控制策略进行改进。 从电流环输入的角度,避免电流调节的饱和。若降低给定转矩的变化率,电流环给定的突变减小。由式可知:PI调节器输出与电流偏差相关,电流偏差小时,减弱了控制器的饱和。给定电流矢量在MTPA曲线上缓慢摆动,实际电流矢量也可以迅速跟踪给定电流矢量。 这种方法可以在一定程度实现动态过程的MTPA,但是给定转矩的斜率影响动态效果,若斜率较大,饱和现象仍然存在;若斜率较小,会影响系统的转矩响应速度,在输出转矩需要突变的场合可能会造成系统故障,如刹车、上坡等。而且当系统的转动惯量较小时,电机转速变化较快,给定转矩变化较慢,还会出现明显的振荡现象。 基于修正d轴电流给定和电流环矢量限幅策略,本研究提出一种闭环修正MTPA控制。 永磁同步电机系统具有强耦合性,当电压饱和时,d-q轴电流跟随同时受限,此时相当于全失控状态。尤其当解耦项精度不够时,实际电流矢量跟踪轨迹不定,容易造成系统的不稳定。 输出电压矢量限幅策略如图4所示。 图4 优先限q轴电压 在电压饱和时,优先限制q轴给定电压,也即尽量提供d轴给定电压,令d轴电流优先跟踪。这样在电压饱和时,电流环处于半失控状态,电流矢量跟踪轨迹明确。 在上述限幅策略的基础上,将d轴电流环作为MTPA修正环,其电流给定值根据q轴反馈电流和MTPA策略得到,结构如图5所示。 图5 闭环查表法MTPA 在给定转矩突变时,q轴给定电流突变并保持不变,由于电压饱和,q轴电流跟踪需要一定时间。随着q轴电流上升,通过MTPA策略查表得到的d轴电流给定及时修正,又由于采用上述优先限q轴的限幅策略,d轴电流可以迅速跟踪,修正实际电流矢量至MTPA曲线。随着q轴电流跟踪到给定点,输出转矩也慢慢跟踪到给定转矩。 为了验证闭环MTPA的可行性,本研究利用Mtlab/Simulink对传统的查表法MTPA和本文提出的闭环MTPA分别进行了仿真。相关电机参数如表1所示。 表1 电机相关参数 仿真统一采用标幺化系统,相关物理量简化为无量纲的常值,单位用pu表示。为了对比动态过程的MTPA特性,同时采用优先限制q轴电压的限幅策略做对比。 为了方便观察电流矢量轨迹,在恒转矩模式工作下,令负载转矩为0.5 pu,给定转矩为1 pu。仿真结果如图6所示。 图6 恒转矩模式下d-q轴给定和反馈电流轨迹 由仿真结果可知:传统的查表法MTPA系统中,给定转矩恒定时,给定电流矢量恒定,为给定转矩曲线与MTPA曲线的交点。输出电压饱和时,因限幅策略的影响,实际电流轨迹如图6(a)中实线所示。动态过程中脱离MTPA状态,稳态时到达给定电流矢量。 改进后系统实际电流矢量轨迹和给定电流矢量轨迹如图6(b)中所示。给定转矩突变后,q轴电流给定先随之突变。实际q轴电流增大后,反馈给d轴,修正其给定电流,并因限幅策略的作用而迅速响应,使实际电流矢量修正至MTPA曲线上。 为了进一步验证闭环修正MTPA的可行性,本研究搭建基于TMS320F28335的电机控制实验平台,并进行了实验。 空载下给定0.1 pu转矩让电机加速,加速阶段观察d-q轴电流波形如图7所示。 图7 转矩模式下实验波形 由实验结果可以看出:传统MTPA与闭环MTPA的转速响应基本一致,但闭环MTPA的d轴给定电流随q轴电流上升后才开始下降,而不是直接随给定转矩而突变。实际跟踪过程中,闭环MTPA的d轴反馈电流基本可以实时跟踪给定,若MTPA策略准确,则动态跟随过程中保持MTPA状态。 针对永磁同步电机,根据其数学模型,本文分析了基速以下时采用MTPA控制的原理,并设计了基于转子磁场定向的矢量控制方案;针对实际矢量控制系统中,因转矩突变而使电流控制器输出饱和,导致动态跟随过程中电流环全失控状态,设计了一种d轴电流优先响应的饱和限幅策略,提升了动态过程的稳定性;为了优化电流动态过程跟随轨迹,又设计了一种闭环MTPA策略,其将d轴电流环设计为MTPA修正环,其电流给定根据q轴反馈电流实时修正,使其满足MTPA关系,由于d轴可以优先响应,动态饱和过程中,实际电流矢量被维持在MTPA曲线附近。 本文利用Matlab/Simulink建立了系统仿真模型,并搭建了基于TMS320F28335的电机控制系统。仿真研究结果证明了控制策略的正确性。
iq|MTPA=IssinβMTPA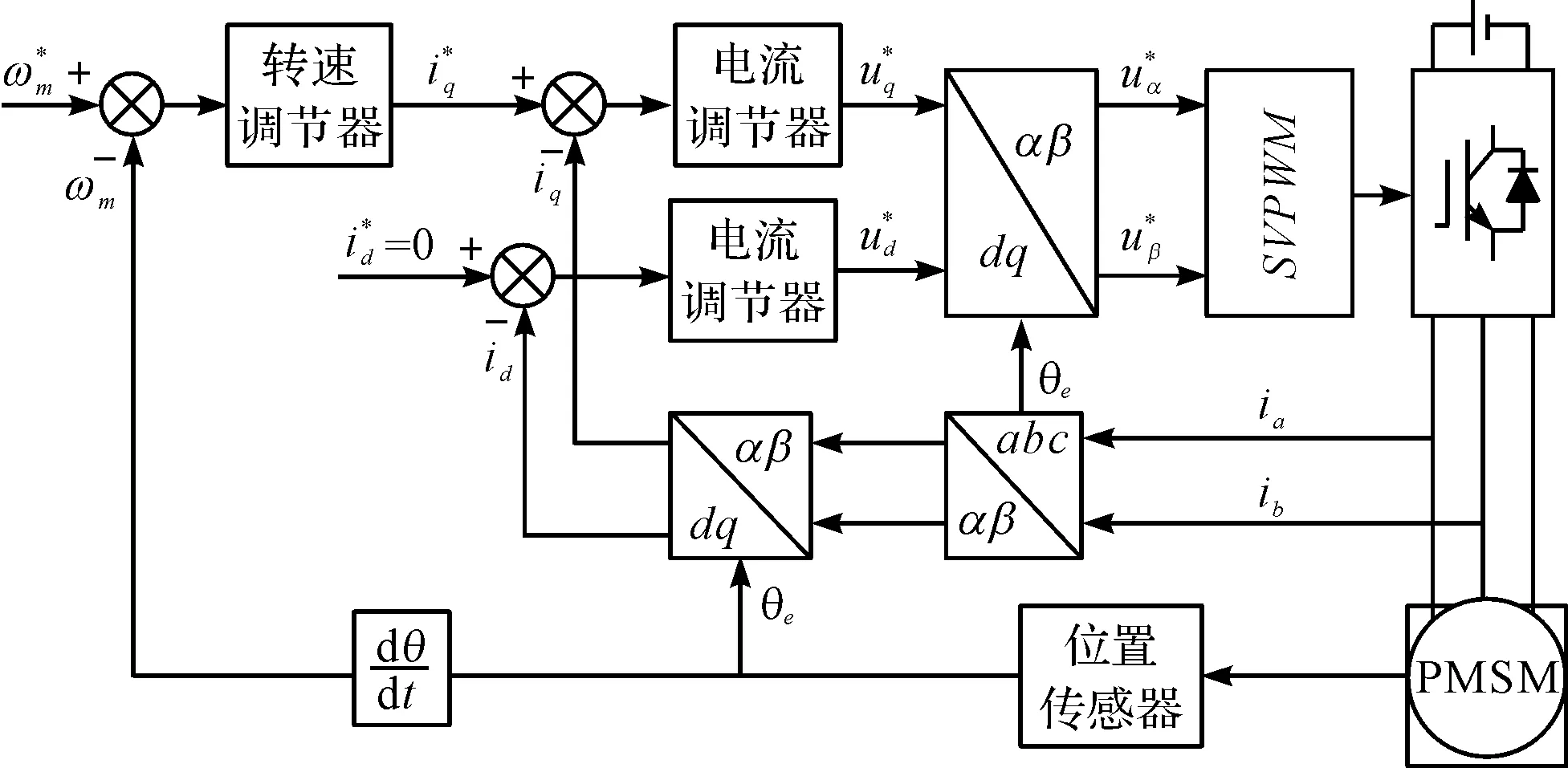


3 MTPA控制的改进
3.1 降低给定转矩变化率
3.2 闭环修正MTPA

4 仿真和实验验证


5 结束语
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
中国交通信息化(2020年4期)2021-01-14
中国特种设备安全(2019年9期)2019-12-03
中国惯性技术学报(2019年3期)2019-10-15
现代防御技术(2019年2期)2019-05-06
石油管材与仪器(2019年1期)2019-03-08
舰船电子对抗(2018年2期)2018-06-19
