
基于PLC的太阳能自动跟踪系统软件设计研究
2018-10-12 08:06张春梅
无线互联科技 2018年18期
张春梅
(天津市河东区职工大学,天津 300162)
太阳能是最清洁的能源,而且取之不尽用之不竭,属于可再生能源。在很多使用方面可以代替不可再生资源,所以,我们应该不断开发更新太阳能再利用的方法,合理有效地利用太阳能不仅有助于保护环境,还可以节约宝贵的不可再生资源。但是由于自然条件、地理位置以及天气情况的影响,导致太阳能不能大规模地应用[1],另外,已有的装置对太阳能的利用率也不是很高,太阳能的采集需要跟踪装置,现在有很多种跟踪装置在使用,但是采集效果不尽如人意[2]。本文在原有硬件设计的基础上给出软件设计结果,使设计更完整,实用性更强。
1 系统软件设计
软件设计是用STEP7进行PLC程序,在设计程序前介绍一下相关理论知识。
1.1 转台角度程序设计
本文主要是通过光电跟踪程序对转台进行控制的,使转台转过一定的俯仰角度和水平角度后正对太阳。但是所转角度大小是通过光电传感器和放大电路处理得到的结果,所以进行程序设计前,必须弄清偏移量与转台所转角度之间的关系[3]。
在自动跟踪系统中,当太阳转动后,这时候落在探测器上的光斑就发生了偏移,水平偏移量为Hx,俯仰偏移量为Hy,但这两个数据必须要转换成水平转角Δa与俯仰转角Δβ才有意义。当光斑发生偏移时,则偏移后的坐标为(Hx,Hy),与O点的距离为偏移后,通过转台旋转Δa和Δβ后,使光斑回到中心点O点。相关示意如图1所示。
从图1可以看出,当光线从A点进入时,光斑中心和探测器中心在一起,不会有偏移量。当光线从B点进入时,这时发生了偏移,此时点X必须经过水平方向旋转到达点X´才可以消除Δa。此时坐标变为因此,Δa就是水平方向需要转动的角度,又因为Δa很小,所以可以表示为:

俯仰方向上角度跟水平方向原理是一样的,可以表示为:

该两式主要是在PLC数据处理程序中涉及,通过使用数据寄存器D和乘除法计算将偏差量转换成所转角度。
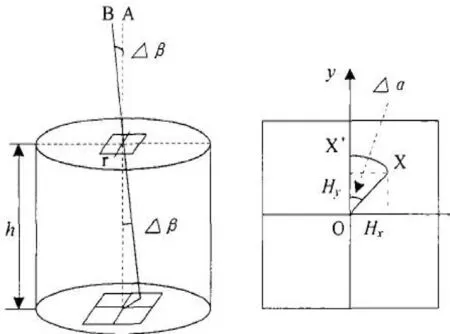
图1 示意图
1.2 控制脉冲程序
PLC软件平台中,控制脉冲程序主要有3个部分:脉冲转换,脉冲方向判断,发出脉冲。其中脉冲转换的目的就是将1.1节算出的转台角度转化为相应的脉冲量;而方向脉冲判断是根据偏移量的正负来决定的,从而控制转台的旋转方向;这些由PLC发出的脉冲会由驱动器接收到,它主要接收两路信号,一路是驱动电机转动的脉冲,一路是电机旋转方向脉冲,接着驱动电机转动[4]。
当每一个采样周期开始时,设计的程序根据采集到的偏移量计算出要发出的脉冲的数量,如果假设水平方向的转台和步进电机传动比为1∶1时,步进电机的细分数为4时,也就是步距角为0.45°,那么水平方向上的脉冲量为:

一般来说,对于机械装置很多部分都是由齿轮来连接的,电机和转台也是这样的。如果他们之间的传动比为1∶N。则根据上式知道,转台转过相同的度数,脉冲量也为原来的N倍。也就是:

当知道脉冲数后,还要知道步进电机转动方向,也就是说水平和俯仰方向的步进电机要根据偏差量的情况决定是正转还是反转,从而达到自动跟踪的效果。由前文分析可知,如果光斑所在的象限不同,步进电机转动方向是不一样的,这个很容易理解,如果把天空分为4个象限,以太阳正对小孔的位置为原点,则光斑所在象限不同就表明太阳在天空的象限不同,因此太阳能电池板旋转的方向也会不一样。鉴于此,还要设计一个程序来判断转台旋转方向。
可是如何判断转台旋转方向呢?当然这个还得要用到Hx和Hy相关数据。主要判断方法如下[5]。
水平方向判断:
俯仰方向判断:
Hx>0时,则说明光斑落在第一或者第四象限,此时电机需要正传才能追踪到太阳。
Hx<0时,则说明光斑落在第二或者第三象限,此时电机需要反转才能追踪到太阳。
光电跟踪主程序流程如图2所示。
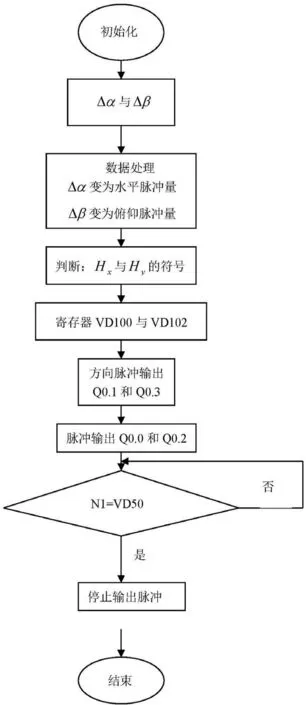
图2 主程序流程
Q0.1是水平方向的步进电机方向脉冲输出端口,Q0.3是俯仰方向的步进电机方向脉冲输出端口,规定电机在电平为1时反转,电机在电平为0时正转。发出脉冲是由定时器跟计数器共同控制的,从而实现脉冲的发出以及数量的多少。先将经过数据处理后的脉冲数据存进寄存器VD50和VD51中,然后发出脉冲并且将脉冲数进行计数。如果发出的脉冲数N1,N2跟寄存器中的数据一样的话,则停止脉冲输出,将计数器复位。
1.3 测角信号程序
太阳能自动跟踪的反馈模块主要利用的器件是增量式光电编码器,编码器和步进电机是利用联轴器连起来的,因此他们会一起运动。当步进电机转动时,编码器将联轴转过的角度通过内部转换机制转换成脉冲送到PLC的高速计数器端口,通过计数脉冲数,来得到反馈位置。该系统共有两个光电编码器,分别将水平方向和俯仰方向的信号送到HSC端,这样方便采集。以下是对HSC的介绍:
高速计数器 使用的输入
HSC0 I0.0, I0.1, I0.2
HSC1 I0.6, I0.7, I1.0, I1.1
HSC2 I1.2, I1.3, I1.4, I1.5
HSC3 I0.1
HSC4 I0.3, I0.4, I0.5
HSC5 I0.4
HSC工作模式:12种工作模式,按照功能构造的不同可以分成4组,有2组是只有一路输入信号,另外两组却有二路输入信号。他们每一组的工作方式是不一样的。同一组也有稍微的差别,比如启动手段不一样,当然复位手段也不一样。
不同计数器工作模式:HSC3和HSC5为模式0;HSC0和HSC4没有模式2,5,8和11;HSC1和HSC2有12种模式。
不同工作模式特点如下。
(1)3、4、5模式:有两路输入信号,一路脉冲输入,另外一路是脉冲方向输入。计数方向由外部信号控制。
(2)6、7、8模式:有两路脉冲输入信号,一个是加计数,另外一个是减计数。计数方向改变会产生中断。
(3)9、10、11模式:A、B两相脉冲相差90°,通过相差决定计数的加减方向,计数可靠。
该系统采用了I0.1和I0.3输入端子,两路输入分别是A相和B相的输入端口,使用线性计数法,正交方式。假如A相超前的话,就用A相计数,步进电机计数为增;如果相反,A相滞后,则采用B相计数,步进电机计数为减。
2 结语
本文所设计的自动跟踪系统其实是一个很老的课题,以前有很多学者研究过,但这次设计的跟踪系统跟以往相比,有自己独特的优势。一方面,对太阳跟踪的效率大大提高,不受天气影响,不受地域限制。另一方面,由于该系统使用的硬件简单易操作,所以相比其他的跟踪系统更节省材料成本和人工成本。
系统通过光电式控制方式,从而实现基于PLC的双轴跟踪系统设计,结构简单,实用成本低。通过四象限探测器采集到精准的跟踪信号,并将信号送到控制器,再通过PLC的程序控制双轴系统。此外,系统使用了闭环控制系统,进一步缩小误差,提高跟踪精度,增加利用效率。
猜你喜欢
都市(2023年6期)2023-12-28
诗歌月刊(2023年1期)2023-03-22
现代食品科技(2022年8期)2022-09-02
地理空间信息(2022年3期)2022-04-01
阅读(高年级)(2019年9期)2019-11-15
电子测试(2018年11期)2018-06-26
制造技术与机床(2017年7期)2018-01-19
测绘工程(2017年3期)2017-12-22
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
电视技术(2012年4期)2012-06-25
