新型控制系统稳定性分析方法研究与展望
2018-10-15 03:47杨晓静
宇航总体技术 2018年5期
杨晓静
(北京航空航天大学航空科学与工程学院,北京100191)
0 引言
稳定性分析是现代飞行器总体设计及其控制系统开发过程的重要环节[1],线性定常稳定性量化指标,如相位裕度 (Phase Margin,PM)和增益裕度 (Gain Margin,GM)[2]已经广泛应用并成为飞行控制律设计的基本准则之一。然而,基于线性数学变换的稳定性裕度不能适应含有如大范围倾侧角或攻角指令、大范围状态变化、系统相关参数快变等因素造成的飞行器轨迹跟踪系统的快变属性的稳定性分析。事实上,线性定常系统控制理论经常将非线性、时变因素视为不确定性,将设计出来的控制器应用在非线性时变系统中时,这些控制器不是处在危险的临界状态,就是在性能和稳定性方面过于保守[3]。复杂飞行器的制导控制系统尚缺乏针对非线性时变系统,类似相位裕度和增益裕度这样广泛使用的标准。而随着非线性控制理论的深入研究和非线性方法在飞行器控制的实验及工程实践中越来越多的应用[4-7],对非线性时变系统建立像相位裕度和增益裕度这样成熟的稳定性测度标准变得日益紧迫重要。
2008年以来,以摄动分析方法为基础,奇异摄动裕度 (Singular Perturbation Margin,SPM)和 广 义 增 益 裕 度 (Generalized Gain Margin,GGM)作为适用于非线性时变系统稳定性测度和量化评估标准在美国控制会议上被提出,科研工作者逐步开发了针对半适定、慢时变、线性定常和非线性定常等系统类型的两类新的稳定裕度的计算方法[8-10],并在仿真和实验中验证了概念建立和计算方法的有效性。
这两种新的稳定裕度针对非线性时变飞行控制系统及其控制律设计,作为先进飞行器对于非标称的操作、高危险动作及其对复杂和剧变环境容纳能力的标准,有潜力成为一项飞行控制律评估与确认技术[11]中的一项基本准则,既能保证飞行控制策略在飞行条件快速变化时对稳定性要求进行必要响应,又能从稳定性定量分析的角度对飞行器难度任务和复杂环境决定的高风险飞行状态进行预先风险评估诊断,在设计阶段充分考虑和挖掘飞行器执行任务的飞行潜力,在复杂飞行控制系统总体设计迭代过程中,切实提高控制系统的安全性和可靠性。
1 定义
1.1 奇异摄动裕度
线性定常奇异摄动系统 (受扰系统)表达为[12]

其中,A11、A21、A12和A22为常数矩阵,ε为奇异摄动参数,z(t)和x(t)分别为快、慢系统状态变量。当ε→0,受扰系统变为标称系统。
定义1[9]:对线性定常受扰系统,奇异摄动参数ε可定义为

其中,ωBW,nom、ωBW,fast和ωcg,nom分别为标称系统带宽、快系统带宽和标称系统穿越频率。奇异摄动裕度,记为εmax,定义为使受扰系统式 (1)临界稳定的快系统最小带宽ωBW,fast。
定义1中,εcl和εlg分别为从闭环系统带宽之比和环路增益的角度定义线性定常系统的奇异摄动参数ε,而对非线性时变系统,奇异摄动裕度可由定义2表达。
定义2[10]:非线性时变标称系统记为


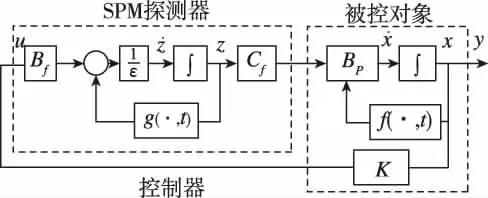
图1 非线性时变奇异摄动系统示意图Fig.1 The diagram of a nonlinear time-varying singular perturbation system
1.2 广义增益裕度
定义3[9]:线性定常标称系统记为

其中,A、B、K是常数系统矩阵。广义增益裕度,记为kmax和kmin,分别定义为标称系统的奇异摄动裕度为0时,系统增益的增加和减少。
定义4[10]:非线性时变标称系统记为

奇异摄动裕度作为相位裕度在非线性时变系统中的扩展,与相位裕度具备一一对应关系,这一关系的严格证明参见文献 [9]。类似线性定常系统相位裕度与增益裕度之间的关系,广义增益裕度概念由奇异摄动裕度定义,广义增益裕度对线性定常系统的分析方法与增益裕度等价,计算线性定常系统的广义增益裕度只需调用计算机计算增益裕度的函数。
2 基本性质
奇异摄动裕度和广义增益裕度与相位裕度和增益裕度的关系如下:
1)对线性定常系统,奇异摄动裕度和广义增益裕度分别相对相位裕度和增益裕度具备等价性;
2)相位裕度和增益裕度是单维结构,奇异摄动裕度和广义增益裕度是立体结构;
3)相位裕度和增益裕度基于传递函数和频率域分析,数值结果单一,只应用于线性定常系统,奇异摄动裕度和广义增益裕度可以进行频率域分析,也可以进行时间域分析,数值结果多元,可用于线性定常系统,也可以应用于线性时变系统和非线性系统。
图2和图3以二维轨迹为例解释了奇异摄动裕度和广义增益裕度的上述性质,及其与相位裕度和增益裕度的异同。
图2和图3中所用符号意义如表1所示。传统方法 (相位裕度和增益裕度)与非线性时变轨迹稳定性分析比较如表2所示。

图2 沿轨迹控制系统稳定性分析示意图(相位裕度PM和增益裕度GM [9])Fig.2 The diagram of the control system stability analysis,PM and GM,along the trajectory

图3 沿轨迹控制系统稳定性分析示意图(奇异摄动裕度SPM和广义增益裕度GGM)Fig.3 The diagram of the control system stability analysis,SPM and GGM,along the trajectory

表1 图2和图3中所用符号意义Tab.1 Meanings of the symbols in Fig.2and Fig.3

表2 传统方法与非线性时变轨迹稳定性分析比较Tab.2 The comparison of trajectory stability analysis between the classic method and nonlinear time-varying method
3 实例:高超声速飞行器控制系统稳定性定量分析
高超声速飞行器的飞行包线大,飞行特性复杂,外部环境多变,其动态特性呈现强非线性、强不确定性和强时变性,对于这种复杂情况,传统相位裕度和增益裕度的计算不仅仅存在保守性的问题,而是有可能得到完全错误的分析结果[3]。本节给出相位裕度和奇异摄动裕度的分析比较。
3.1 问题提出
高超声速飞行器主要结构不确定性为质量m、转动惯量Iy、弹性模态频率ωi、大气密度ρ、飞行器参考面积S、平均气动弦长珋c、重力加速度g、前后弹性变形角Δτ1和Δτ2、气动参数和控制输入等,主要非结构不确定性为未建模弹性模态。按照摄动标准分为奇异摄动和正则摄动。高超声速飞行器不确定性的分类如表3所示。
考虑飞行器沿轨迹飞行时的质心平移环路的稳定裕度,即在三自由度质心平移环路中,增加三自由度姿态控制环路,即攻角和侧滑角的跟踪动态 (如表3所示,该环路对质心平移环路为奇异摄动),再入飞行器制导控制系统 (轨迹跟踪)如图4所示。

表3 高超声速飞行器不确定性分类Tab.3 Uncertainty classification of hypersonic vehicles

图4 再入飞行器制导控制系统 (轨迹跟踪)Fig.4 Re-entry Vehicle guidance control systems (trajectory tracking)
已知参考轨迹:
1)参考轨迹各个状态量的数值,时间 (s),距地面高度 (m),经度 (°),纬度 (°),轨迹倾角 (°),航向角 (°),速度 (m/s),攻角 (°)、速度轴滚转角 (°)和距地心高度 (m),如图5和图6所示。
2)沿参考轨迹的线性化系统矩阵序列Ai和Bi;
3)三自由度纵向控制反馈矩阵序列Ki。
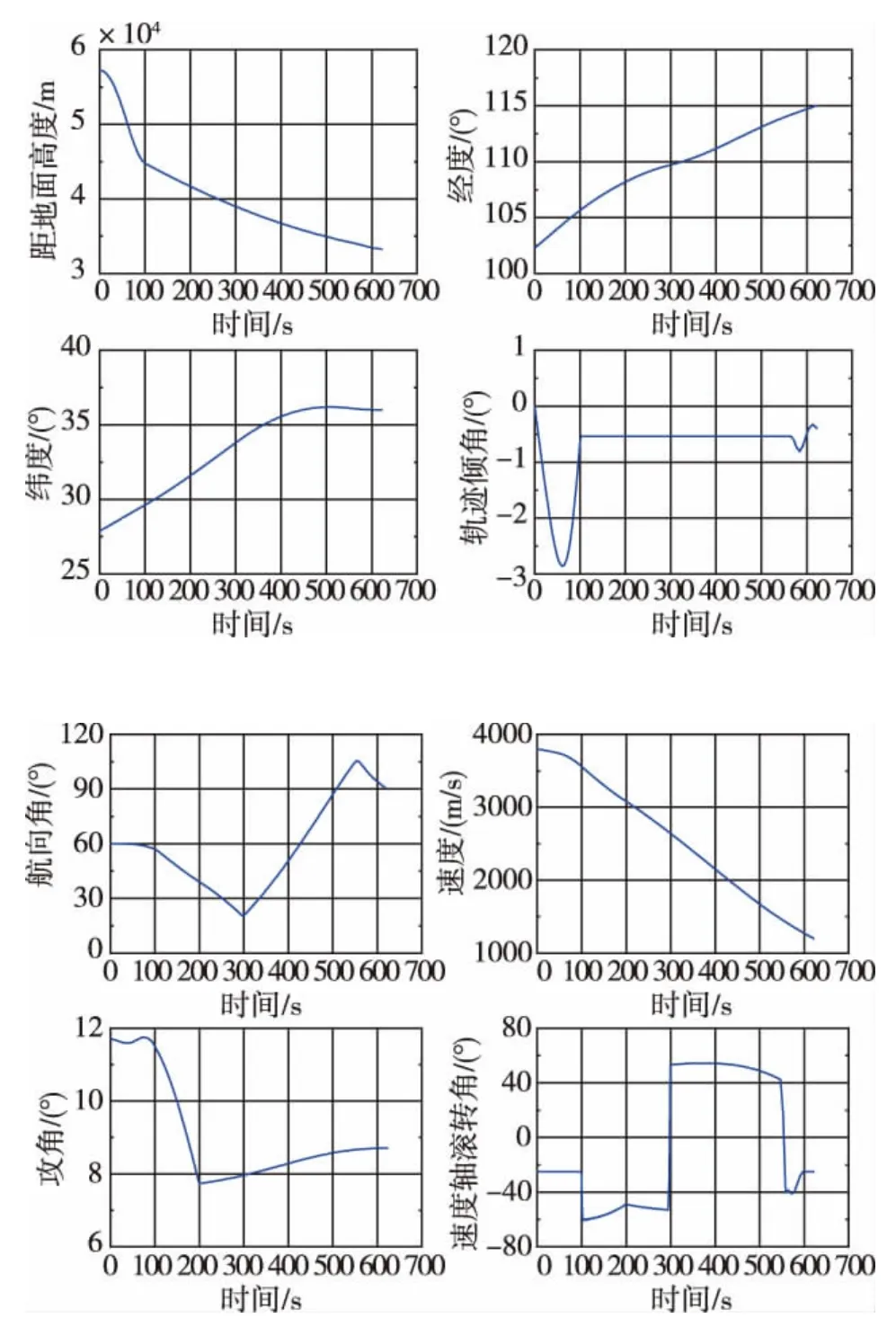
图5 参考轨迹Fig.5 Reference trajectory

图6 高度速度参考轨迹Fig.6 Reference trajectory in altitude and velocity
3.2 相位裕度分析
沿轨迹线性化系统矩阵A(t)、B(t)在时间点ti的数值可求得导数矩阵(t)、(t)在时间点ti的数值,系统矩阵 A(t)、B(t)及其导数矩阵(t)、(t)的大小由其范数表征,各矩阵二范数如图7所示。
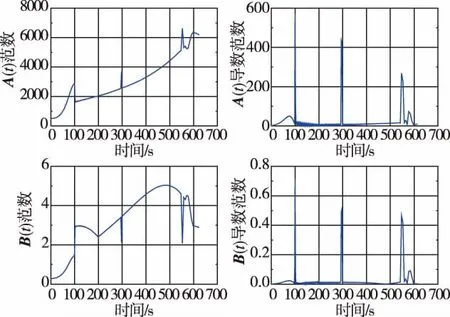
图7 系统矩阵及其时间导数矩阵范数Fig.7 The norm of system matrices and its time derivative matrices
由图7可见,飞行器系统A(t)、B(t)在100s左右,300s左右和550s左右3个时间点发生了较快变化,对比图5参考轨迹的滚转角图像,这3处变化对应标称轨迹中控制状态速度轴滚转角的快变时刻。下面考察翻转过程系统的快速变化对稳定性和稳定裕度的影响。如图8所示,飞行器系统矩阵在280秒至320秒呈现快变状态,系统矩阵导数发生快速变化。

图8 系统矩阵及其时间导数矩阵范数 (280s~320s)(*:信号点)Fig.8 The norm of system matrices and its time derivative matrices(280s~320s)(*:signal point)
根据开环系统逐点计算闭环攻角通道的冻结时间相位裕度和增益裕度,如图9所示。
根据开环系统逐点计算闭环稳定滚转角通道的冻结时间相位裕度和增益裕度,如图10所示。

图9 攻角通道的冻结时间相位裕度和增益裕度Fig.9 The phase margin and gain margin of the frozen time system in the angle of attack channel
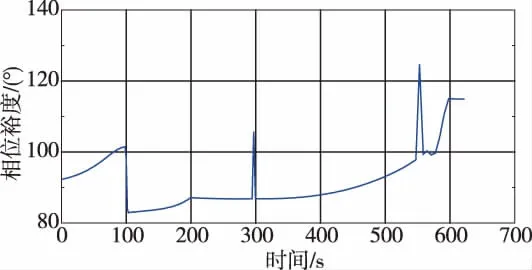
图10 滚转角通道的冻结时间相位裕度(增益裕度为正无穷)Fig.10 The phase margin of the frozen time system in the roll angle channel(the gain margin is positive infinity)
由图9和图10可见,滚转角通道比攻角通道具有更大的相位裕度。在100s左右、300s左右和550s左右3个系统快变时刻,滚转角通道和攻角通道的相位裕度均有增加的现象,即系统更稳定。图9中70s~170s,增益裕度为正无穷,滚转角通道冻结时间系统增益裕度为正无穷。
3.3 奇异摄动裕度分析
这里考察300s左右系统参数快变的情况。稳定裕度分析与控制器的设计紧密相关,每一个设计点都已经利用线性二次型调节器 (LQR)方法预先优化控制器,在下一个信号未知的情况下,采用的控制方法为冻结时间方法,一个信号周期内采用相同的增益,即基于LQR设计的冻结时间方法。在整条轨迹都预先知道,或下一个信号点预先知道的情况下,一个信号周期内采用插值进行增益调度,即基于LQR设计的插值方法。
3.3.1 冻结时间LQR方法滚转角通道
这里选择稳态增益为1的2阶线性定常系统作为奇异摄动裕度探测器,其传递函数为

取参数ζ=1,ω0=2。采用冻结时间LQR控制方法并进行仿真,即在下面一个轨迹状态点给出之前,使用前一个反馈常数矩阵Ki。奇异摄动参数为0.3时,初始误差在速度误差状态和待飞航程误差状态震荡的情况下,经过10s左右稳定。奇异摄动参数此处的意义在于对滚转角的跟踪速度,图11显示了奇异摄动探测器模块前后滚转角在奇异摄动参数为0.3时滞后的情况。

图11 蓝色:控制要求的滚转角,红色:滞后的滚转角Fig.11 Blue:the roll angle of control requires,red:the lagging roll angle
由于奇异摄动探测器为2阶线性定常系统,在奇异摄动参数为0.3时,信号跟踪速度有滞后,幅值也受到一些影响。由图11可见,滚转角滞后约0.25s。奇异摄动参数为0.4时,系统虽然不发散,但已经失去了收敛的稳定性。因此,滚转角通道奇异摄动裕度为0.3。
3.3.2 冻结时间LQR方法攻角通道
用类似3.3.1节的分析方法,攻角通道的奇异摄动裕度几乎为0。奇异摄动参数为0.0001时,初始误差其中,分别为误差系统变量质心到地心的距离、相对于地心惯性系的速度、速度矢量与水平面的夹角、待飞航程的初始值,系统很快震荡发散。
比较冻结时间控制设计方法下滚转角通道、攻角通道的奇异摄动裕度分析和相位裕度分析的结果,有如下结论:
1)滚转角快速变化时,系统稳定性略呈加强趋势,奇异摄动裕度与相位裕度分析的趋势相同,但相位裕度的定量差别更大。
2)攻角通道的冻结时间稳定裕度比滚转通道小,奇异摄动裕度与相位裕度分析结论相同,但奇异摄动裕度远小于相位裕度的数值。
3.3.3 插值LQR方法滚转角通道
飞行器制导控制设计的参数对稳定性和稳定裕度都有影响,即稳定裕度分析与飞行器平移环和姿态环的控制器设计紧密相关。应用LQR方法时,更多地采用插值方法作为控制时间之间的过渡,这样的过渡较冻结时间方法提高了控制器的有效性。然而,使用相位裕度和增益裕度分析,这样的差别是不可见的。对基于LQR设计插值方法闭环控制系统进行时变稳定性量分析,选择一阶全通滤波器作为奇异摄动裕度探测器,全通滤波器具有传递函数形式
为比较前述冻结时间方法时,数值结果具有一致性,即对应的奇异摄动裕度在快系统跟踪时间上可比,选择ω0=2。经过仿真计算,滚转角通道奇异摄动裕度为0.21。
3.3.4 插值LQR方法攻角通道
使用类似分析方法,奇异摄动参数为0.0077时,系统处于临界稳定的状态。比较冻结时间LQR方法和插值LQR方法控制器设计的奇异摄动裕度,有如下结论:
1)在滚转角通道上,冻结时间LQR方法的稳定裕度大于插值LQR方法。冻结时间LQR方法奇异摄动裕度为0.3,而插值LQR方法的奇异摄动裕度为0.21,LQR在离散时间点的插值过渡并没有对系统滚转角的稳定裕度有所改善。
2)在攻角通道上,插值LQR方法的稳定裕度大于冻结时间LQR方法。攻角通道上,冻结时间LQR方法控制闭环几乎不具有奇异摄动裕度,而插值LQR方法设计控制器时,奇异摄动裕度为0.0077,对应的攻角滞后时间为0.02s。两种控制方法下,飞行器翻转过程并未给稳定裕度造成不利影响,反而稳定性稍好,比较图9和图10,这与相位裕度的分析结论相同。综合比较两种控制方法,从稳定性的角度,插值LQR方法好于冻结时间LQR方法。
3.4 相位裕度和奇异摄动裕度结论对比和验证
奇异摄动裕度与相位裕度具有逐点一一对应的性质,通过该对应关系可以通过相同的奇异摄动裕度探测器,找到相位裕度对应的时间性质,即找到攻角和滚转角通道上相应的相位裕度表征的时间滞后,并由此可以验证相位裕度对滞后的预测是否正确,并与奇异摄动裕度的结论相比较。
选择全通滤波器作为奇异摄动裕度探测器,全通滤波器具有传递函数形式 (8),与前文保持一致,这里选择ω0=2,当s=j为单位纯虚数,信号进入全通滤波器的时间滞后,记为Tdelay。

全通滤波器中奇异摄动参数为原标称系统的奇异摄动裕度 (记为εmax)时的相位绝对值即为它所检测的相位裕度,记为PM。

上述时间滞后Tdelay、奇异摄动裕度εmax、相位裕度PM的关系如图12~图14所示。
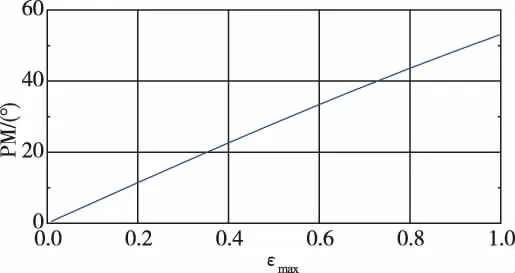
图12 奇异摄动裕度 (εmax)与相位裕度 (PM)的关系Fig.12 The relationship between SPM and PM
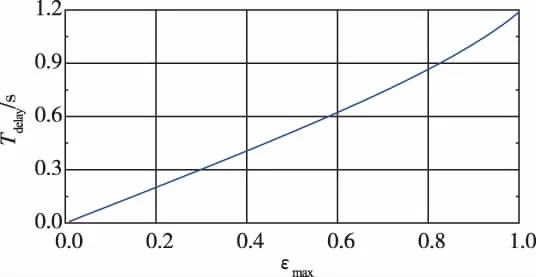
图13 奇异摄动裕度 (εmax)与时间滞后Tdelay的关系Fig.13 The relationship between SPM and time delay

图14 相位裕度 (PM)与时间滞后Tdelay的关系Fig.14 The relationship between PM and time delay
由图14可知,相位裕度为50°时,相对应允许的时间滞后大于1s,然而,图9~图10显示,攻角通道和滚转角通道的相位裕度都基本大于70°,即相位裕度允许的攻角和滚转角滞后都至少为1.2s。前文奇异摄动裕度对滚转角通道在无其他扰动情况下估计的滚转角允许的滞后约为0.2s,攻角允许的滞后约为0.02s。用相位裕度方法分析的结论是错误的。
4 结论和开放性问题
4.1 结论
1)奇异摄动裕度和广义增益裕度是相位裕度和增益裕度在非线性时变系统中的推广,能在非线性系统时反映出与系统多方面非线性性质具体关系,是适用于非线性时变系统稳定性量化的评估标准。
2)在高超声速飞行器的仿真实例中,控制方法与稳定性紧密相关,而相位裕度和增益裕度分析不能反映出该相关性。沿参考轨迹相位裕度分析得到的关于姿态控制环路时间滞后的结论是错误的,奇异摄动裕度分析得到的结论合理,可以为进一步细化量化关联飞行器本体参数与轨迹设计提供参考。
4.2 开放性问题
1)拓展原有基于标称系统与快系统带宽之比的单输入单输出奇异摄动裕度和广义增益裕度概念,针对多变量飞行控制系统,建立多输入多输出奇异摄动裕度和广义增益裕度概念;非线性时变稳定储备准则相关算法优化和理论工具 (如非线性系统时变谱特征、系统特征结构以及吸引域估计)的进一步完善和推广。
2)奇异摄动系统解耦技术在一般时变系统中的推广。奇异摄动系统解耦方法能将奇异摄动参数以解析形式明确表达在系统解耦之后的快慢子系统中,有利于揭示稳定裕度与飞行器姿控动态特性之间的关联机理和稳定储备准则具体算法的进一步优化。
3)正如图2和图3所示,奇异摄动裕度和广义增益裕度是立体结构,其数值是非线性系统平衡点的吸引域和吸引半径的函数,在估计吸引半径的方法中,Lyapunov函数方法及其优化解法是目前广泛使用的主要方法,高超声速飞行器制导系统和控制系统中相应吸引域和吸引半径的最大化方法研究和应用是未来工作的一个重要部分。
4)基于已有的最小相位探测器、全通滤波器型探测器、纯延迟及其Pade有理近似探测器和其它推广形式等,进一步根据系统不确定性设计奇异摄动裕度探测器和广义增益裕度探测器。尤其是对具体机型的参数不确定性的分布情况,美国国家航空航天局做了大量以计算机仿真为核心的工作[13]。以高超声速飞行器系统误差的来源、分类、分布情况等为依据设计奇异摄动裕度和广义增益裕度探测器,以及以非线性时变系统的稳定裕度为标准的模型误差分析依然是一个基础而开放的问题。
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
中国舰船研究(2022年1期)2022-03-19
科学导报·科学工程与电力(2019年22期)2019-10-21
宇航总体技术(2019年5期)2019-10-11
阅读与作文(英语初中版)(2019年11期)2019-09-10
兵器装备工程学报(2019年7期)2019-08-13
汽车零部件(2018年8期)2018-09-06
软件(2017年9期)2018-03-02
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27