
主动悬架轮腿式全地形移动机器人俯仰姿态闭环控制
2018-10-18 12:27马芳武倪利伟聂家弘
农业工程学报 2018年20期
马芳武,倪利伟,吴 量,聂家弘
主动悬架轮腿式全地形移动机器人俯仰姿态闭环控制
马芳武,倪利伟,吴 量※,聂家弘
(1. 吉林大学汽车工程学院,长春 130012;2. 吉林大学汽车仿真与控制国家重点实验室,长春 130012)
农业机器人在作业时,不可避免的会出现位姿(质心位置与姿态)的变化。为了实现对其位姿的控制,降低复杂路面对机器人姿态的影响,确保机器人的行驶稳定性,基于汽车多连杆独立悬挂系统,设计了一款轮腿式全地形移动机器人。首先在建立轮腿机器人控制运动学模型的基础上,通过矢量法和欧拉公式得到了1/2整机逆运动学模型,进而求出机身运动俯仰角、作动器工作长度与各腿关节转角的变换关系,并对轮腿机器人的位置和姿态进行解耦控制。为了确保机器人运动学控制模型以及运动学逆解的可靠性,在理论模型的基础上加工了1/4台架并进行了单腿运动学标定与运动学控制验证,结果表明仿真数据与试验数据基本吻合,最大误差控制在1.5%以内。在单腿运动学控制模型正确的基础上,采用比例控制算法在MATLAB中搭建整机轮腿机器人俯仰姿态控制策略,在满足轮腿机器人质心位置不变的条件下实现其俯仰姿态闭环控制;最后在ADAMS中构建轮腿机器人虚拟样机模型,利用MATLAB和ADAMS平台搭建轮腿机器人整机俯仰姿态闭环控制联合仿真模型,仿真结果表明轮腿机器人的俯仰姿态与质心位置均有很好的跟踪效果,其中质心位置误差、姿态误差分别控制在0.2%、2%,结果验证了所述轮腿机器人俯仰姿态闭环控制策略的正确性。
机器人;运动学;控制;模型;联合仿真
0 引 言
行走系列机器人广泛应用于农田自走式作业,涉及的田间作业主要有旋耕、喷药、施肥、播种、运输等[1-3]。常用的田间作业行走机器人主要有足式、轮式、履带式三大类[4]。足式、履带式机器人越障性能好,但是能源利用率低[5-6];轮式机器人机动性能好,然而环境适应性差[7-8]。为了兼顾以上行走机构的优势,文章设计一种轮腿式全地形移动机器人,以期在精准农业领域有广泛的应用前景[9-10]。长期的生产实践表明,大田作业时,机器人需要频繁跨越田间横向分布的田垄,这引起机器人质心位置与机身俯仰姿态的变化[11-12],导致作业精度降低、路径规划偏离、能源消耗增加,因此对田间作业机器人的俯仰姿态进行控制显得尤为重要[13]。
机器人姿态控制建模方法多种多样,系统总结主要有以下3种:①速度表示法[14],通过描述不同刚体间运动位置及速度的关系,建立运动学模型,陈刚等[4]基于速度逆运动学对六足步行机器人的位姿进行控制,控制精度较高,但是未固定机器人质心位置,Grand等[15]应用速度模型对Hylos机器人在3D路面上的轨迹跟踪与姿态进行控制,取得了良好的效果,但为开环控制;②几何法[16],基于刚体间的几何约束,建立运动学模型。张东胜等[17]对五自由度混联机器人进行几何结构简化,在平面模型的基础上进行运动学控制,具有模型简单、易于控制的优点,但为冗余控制,能耗相应增加。阳涵疆等[18]在充分利用混联采摘机器人几何特性的基础上结合旋量理论对机器人进行控制,坐标系建立过程简单易懂,控制误差相对较小,然而归纳出具有通用性的建模方法相对较难。美国MIT基于月球采样漫游车自身的几何关系,进行月球表面复杂路面的路径寻优控制模拟,验证了算法有效性,但是月球车没有涉及几何结构的主动控制[19];③D-H坐标变换法[20],此法是目前机器人领域最常用的姿态控制方法,基本思路是建立机体与大地之间的位姿变化关系,根据机器人多链闭环的特性,推导出整车位姿变换关系式的逆解,进而对整车姿态进行控制;罗陆锋等[21]以六自由度采摘机器人为原型,运用D-H法建立机器人三维虚拟仿真模型,对虚拟环境下的机器人进行运动学正解和逆解分析,显著提高作业精度。随着后期的不断改进,此法被广泛应用于复杂地形下轮腿机器人的运动学建模与姿态控制,尤其是月球车的建模,但是该建模方法相对复杂,可能会存在奇异矩阵与广义逆矩阵[22-23];另外沈阳自动化研究所基于WCM(轮心法)法对月球漫游车进行了运动学建模,能够快速准确的建立不规则地形下轮腿机器人的运动学模型[24]。
机器人姿态控制模型众多,然而大多是针对并联单链的开环多刚体系统[25],考虑到文章涉及的轮腿机器人为了隔振有多连杆悬架的存在[26],上述方法均不能直接利用,因此文章对模型进行适当简化,将多连杆悬架等效为双横臂悬架[27],并建立整机1/2模型。根据他们之间的几何关系,求出车身俯仰角与双横臂相对车身转角之间的关系。依据等效双横臂(下控制臂)、车身、三脚架、弹簧阻尼组成的四连杆机构与作动器之间的数学关系,建立整机俯仰姿态控制算法。为了验证控制算法的有效性,加工了1/4台架模型,并进行了试验验证[28-32]。然后在单腿运动学控制模型的基础上搭建轮腿机器人整机俯仰姿态闭环控制策略,接着在ADAMS中构建虚拟样机模型,利用MATLAB和ADAMS平台进行整机俯仰姿态联合仿真,对算法进行验证。
1 轮腿式全地形移动机器人运动学建模
1.1 结构及工作原理
基于主动悬架理念[33],设计了一款新型轮腿式全地形移动机器人,具有四轮转向、主动姿态调节、四轮驱动等功能。图1为机器人三维模型,机器人由机器人本体、主动悬架系统及4条轮腿组成,机器人整体尺寸为1 200mm×900 mm×600 mm。图1b为1/4台架模型,轮毂电机总成7绕转向总成6转动可实现四轮转向,作动器1伸缩带动三脚架2旋转实现车身的主动姿态调节。

图1 轮腿式全地移动形机器人三维模型
1.2 运动学分析
文章主要研究大田作业时机器人跨越田垄时的机身俯仰问题,机器人整机为前后对称结构,因此可取整机二分之一模型进行运动学分析。为了得到作动器1伸长量与悬架绕车身转角之间的关系,可以将图1所示的上控制臂等效为图2所示的单横臂,同理下控制臂也可等效为单横臂,因此图1所示的悬架系统可等效为等长双横臂悬架[22],其中对应图1b所示的上控制臂4,对应图1b所示的下控制臂3,/点并非悬架实际连接点,而是悬架上、下控制臂的等效连接点。
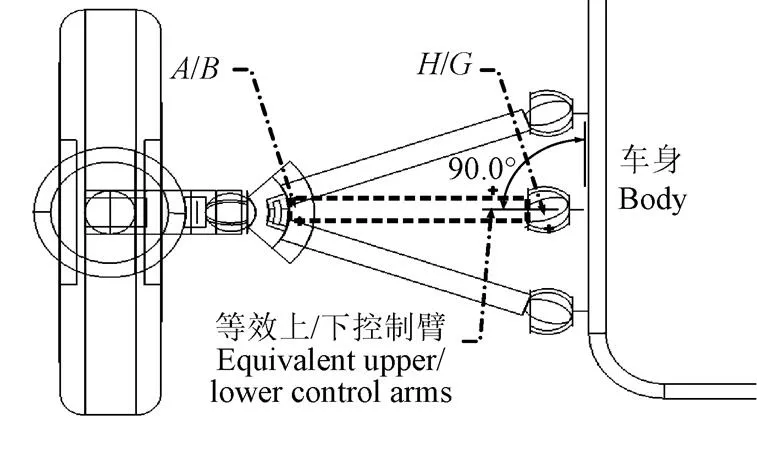
注:H/G为悬架上、下控制臂的等效连接点。A/B为悬架与腿部转向机构的上下连接点。
图3为固定质心的机器人俯仰姿态示意图,假设机体质心位置不变,车身向后俯仰,俯仰角为,悬架相对机体底面抬升角度。
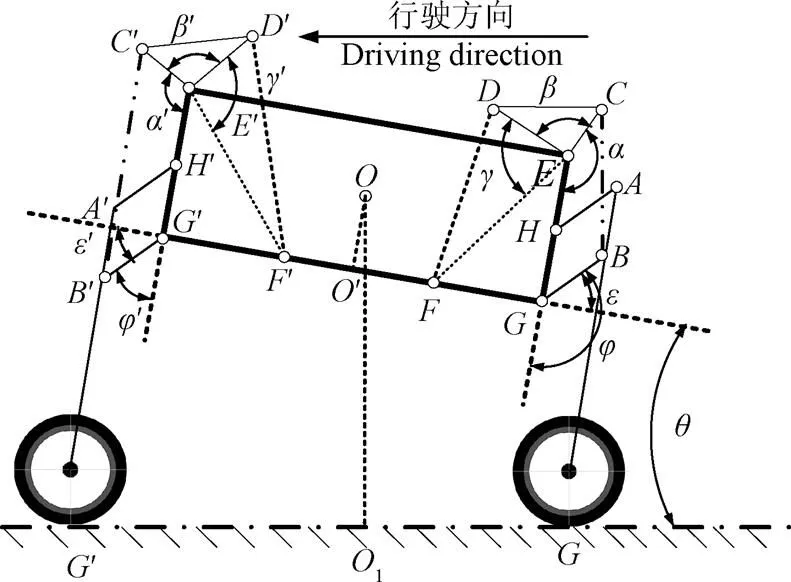
注:θ为俯仰角,(°);ε为悬架BG转角,(°);φ=ε+π/2,(°);γ为DE与EF夹角,(°);α为EC与EG夹角,(°);β为DE与EC夹角,(°),其余同理。
以机体尾部为例,依据几何关系可求出与之间的耦合运动关系式,见式(1)。

化简得

为了求出作动器伸长量与(=+π/2)之间的关系,可作如下分析:根据等连杆组成机构的运动特性,可将看作一四连杆机构进行运动学分析,其中为曲柄,为机架,具体结构如图4所示。

注:α0、φ0为向量L6、L3的初始角,(°);θ1i、θ2i、θ3i为向量L6、L7、L3的运动角,(°);φ=θ3i+φ0,(°);α=θ1i+α0,(°);向量L3的长度等于BG,mm;向量L5的长度等于EG,mm;向量L6的长度等于EC,mm;向量L7的长度等于BC,mm。
将各构件表示为杆矢量,则有
表示为复数形式有


化简式(5)得
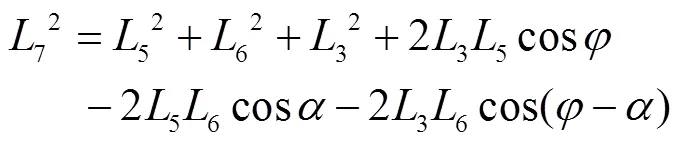
对于三角形,由三角函数知
式中12分别代表的长度,用于三角函数(7)式的关系说明。
又因为
所以
将式(8)、(9)代入式(6)可求得作动器伸长量与之间的关系式(10)
(10)

联合式(2)、(10)可求出机体尾部作动器伸长量与车身俯仰角之间的关系式(12)。

同理可求出机体前部作动器伸长量与车身俯仰角之间的运动关系式,在此不再列出,此时′π/2′。式中0、0为向量6、3的初始角,(°);1i、2i、3i为向量6、7、3的运动角,(°);3i+0,(°);1i+0,(°)。=,′=1,=2=2,=3,=4=1,=5,=6,=7,


1.3 试验验证
作动器的伸长量与角之间的正确关系是确保机器人姿态调整的关键,即式(10)的正确与否直接影响逆解的控制精度,因此在理论分析的基础上通过试验验证式(10)的正确性。试验所需器材主要有试验台架、LPMS三轴陀螺仪、电推杆(上海格吉SEC61-R268)及配套控制器、数据采集卡、上位机、直流稳压电源等,其中三轴陀螺仪布置在下控制臂所在平面,具体试验设备及陀螺仪布置方式见图5。

图5 陀螺仪与试验台架布置示意图
试验过程中通过数据采集卡将电推杆运动行程与陀螺仪欧拉角度信号上传给上位机,两者数据分别对应,之后通过MATLAB对数据进行处理,以曲线方式显示与之间的关系,为了与理论分析结果(式(10))方便对比,以来表示,=π/2+。试验之前应首先对电推杆及陀螺仪进行标定,下控制臂处于水平面时陀螺仪欧拉角度标定为0°(即=0°)。当逆时针旋转时大于0,相反则小于0。表1为轮腿机器人单腿主要尺寸参数。

表1 机器人单腿主要参数
作动器初始长度为427 mm,最大行程为150 mm,为了提高试验精度,试验过程中作动器的有效行程设置为100 mm,伸长范围为(450~550)mm,作动器每伸长10 mm,记录一次转角,以此得到作动器伸长量与角之间关系的试验数据,重复试验取平均值可提高试验精度。将表1数据代入式(10)可得到作动器伸长量与角之间的理论运动学关系。
试验结果如下:表2为作动器伸长量与角之间的试验结果与仿真分析结果对比表,分析可知,两者变化趋势基本一致,数据基本吻合,最大误差为1.5%。误差存在主要原因是加工精度、陀螺仪布置精度、装配误差等造成的,综上分析,式(10)能够可靠、正确的反映作动器伸长量与角之间的关系。
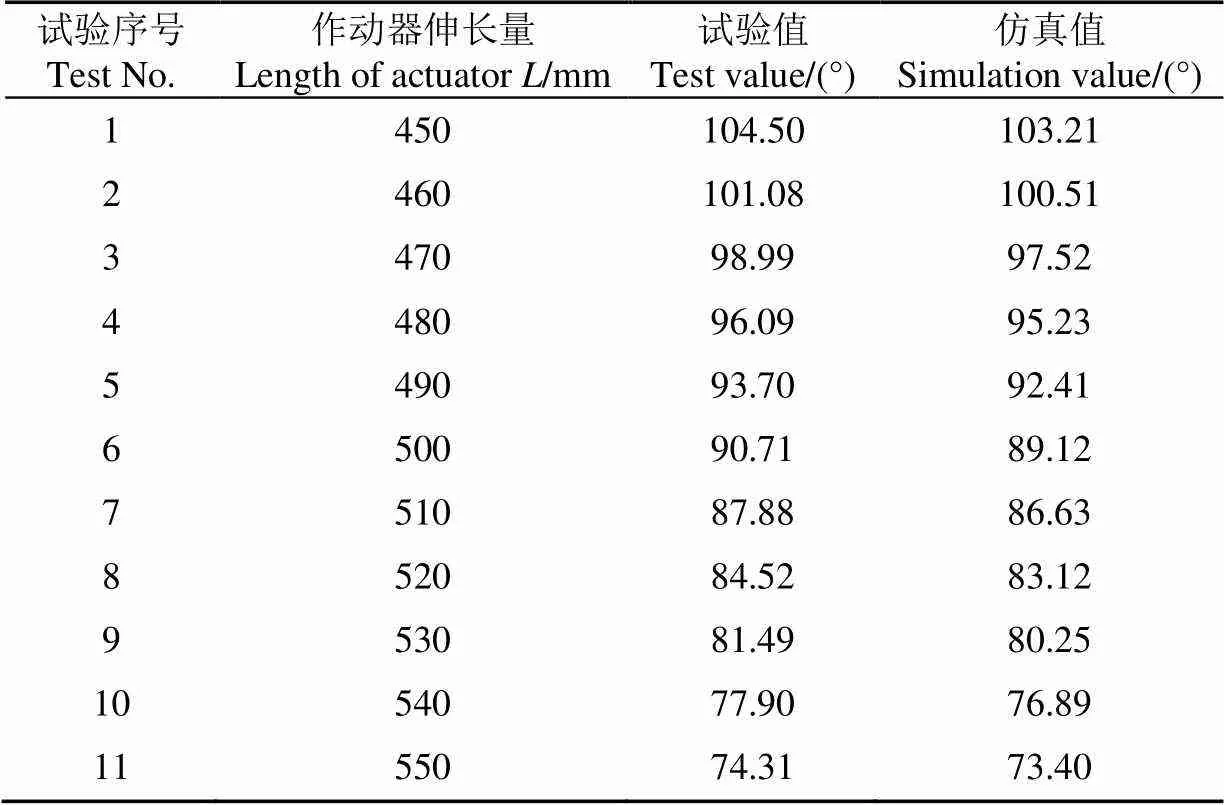
表2 理论分析与试验值对比
2 姿态闭环控制模型
轮腿机器人每条腿有2个自由度,4条腿总共8个自由度,机器人位姿控制中共有4个控制量,即4个作动器输出行程,目标量也为4个:3个位置分量、1个俯仰姿态角分量,此时位姿控制为冗余控制,同时位姿目标量和关节角被控量之间是非线性藕合关系。
如式(11)~式(13)所述,可以建立机器人作动器运动位移及速度与机器人机体质心位置、速度、机体俯仰姿态角、角速度之间的联系。基于轮腿机器人运动学模型构建相应的控制策略,对机器人位置和俯仰姿态进行控制。
文章设计的轮腿机器人位姿控制框图如图6所示,其位姿控制包括2个控制环:位置开环和俯仰姿态闭环,对轮腿机器人分别施加位置控制和姿态控制构建控制策略,实现对轮腿机器人位姿的解耦控制。轮腿机器人俯仰闭环控制基本思路为:通过机器人运动学模型建立机器人俯仰姿态与机器人作动器行程之间的联系,通过俯仰姿态闭环控制实时得到机器人各作动器的伸长量,将得到的作动器行程值作为输出指令控制机器人各个关节运动,从而实现机器人俯仰姿态的闭环精确控制,=(−a)。位置控制的基本思路是:在调整机身俯仰姿态的同时保证机身质心位置不变,位置控制为开环控制,为俯仰姿态闭环控制比例系数即增益,为传感器测得的位置矩阵[],根据式(10)~(13)建立轮腿机器人位移、速度运动学模型,由图6所示控制框图实现轮腿机器人姿态闭环控制。
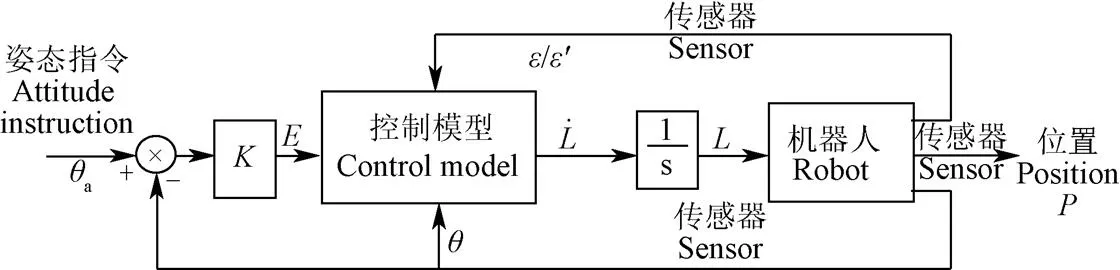
注:E为俯仰偏差,(°);K为增益;θ为传感器测得俯角,(°);θa为目标俯仰姿态角,(°);P为位置矩阵;L为作动器伸长量,mm;为作动器伸长速度,mm·s-1;ε/ε′ 为悬架旋转角度,(°)。
3 算法仿真验证
3.1 MATLAB、ADAMS联合仿真
文章以轮腿机器人越田垄为例,根据前两部分所述的运动学分析及姿态闭环控制模型,建立轮腿机器人的MATLAB运动学模型、机体位置控制模型、机体俯仰姿态闭环控制模型、ADAMS模型,MATLAB、ADAMS联合仿真模型,如图7所示。为了更加真实的模拟轮腿机器人轮胎与地面的接触特性,选用ADAMS中摩托车轮胎模型pac_mc_120_70R17_cross替代原来的刚体轮胎模型,并对轮胎模型参数按需进行修改。

图7 MATLAB、ADAMS联合仿真框图
具体联合仿真流程如下:MATLAB将计算得到的作动器行程发送至ADAMS模型,轮腿机器人根据控制信号调整各个关节角度运动,同时输出机器人位置、俯仰姿态及各个关节的关节角度作为反馈,从而实现MATLAB与ADAMS的联合闭环控制仿真。图8为MATLAB与ADAMS的信息交互框图,表3为如图3所示轮腿机器人的结构参数。
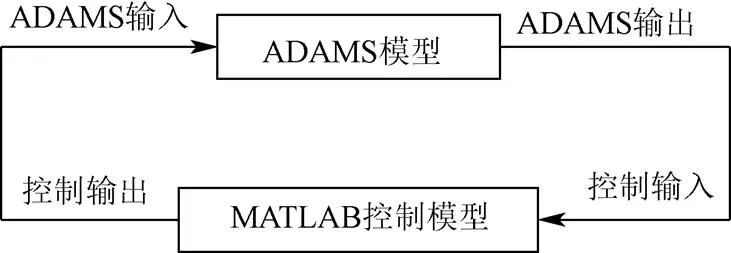
图8 MATLAB与ADAMS信息交互框图
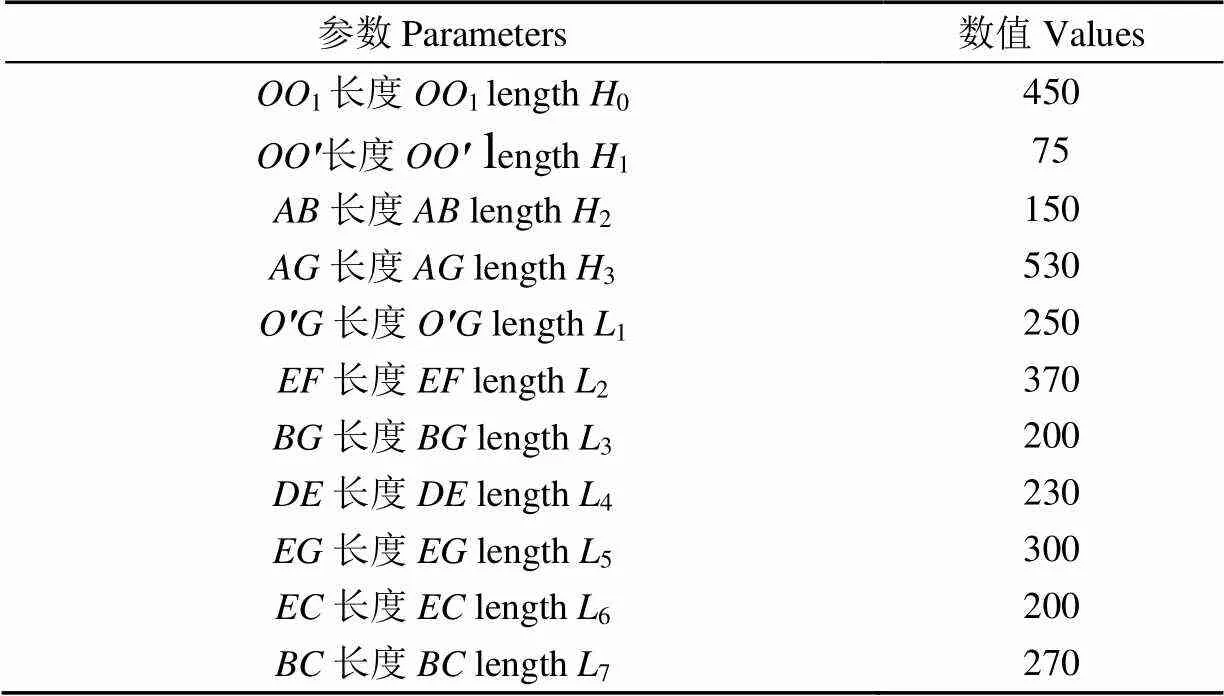
表3 轮腿机器人结构参数
用于姿态模型验证的轮腿机器人位姿参数如下:初始位置的分量、分量和分量分别为450、0、0 mm,初始姿态的横摆角、俯仰角和侧倾角分别为0°、0°、0°;目标位置的分量、分量和分量分别为450、0、0 mm目标姿态的横摆角、俯仰角和侧倾角分别为0°、9°、0°。
3.2 结果分析
图9为轮腿机器人固定质心位置时,俯仰姿态的调整过程,响应时间=10s时机器人的位置与姿态达到稳定值。图10为轮腿机器人位置与姿态在算法控制下的目标值与实际值(仿真输出值)对比图,观察可知机器人在调整俯仰姿态时,机器人质心位置分量(,,)以及航向角、侧倾角几乎没有变化,并且俯仰姿态有很好的跟踪效果。
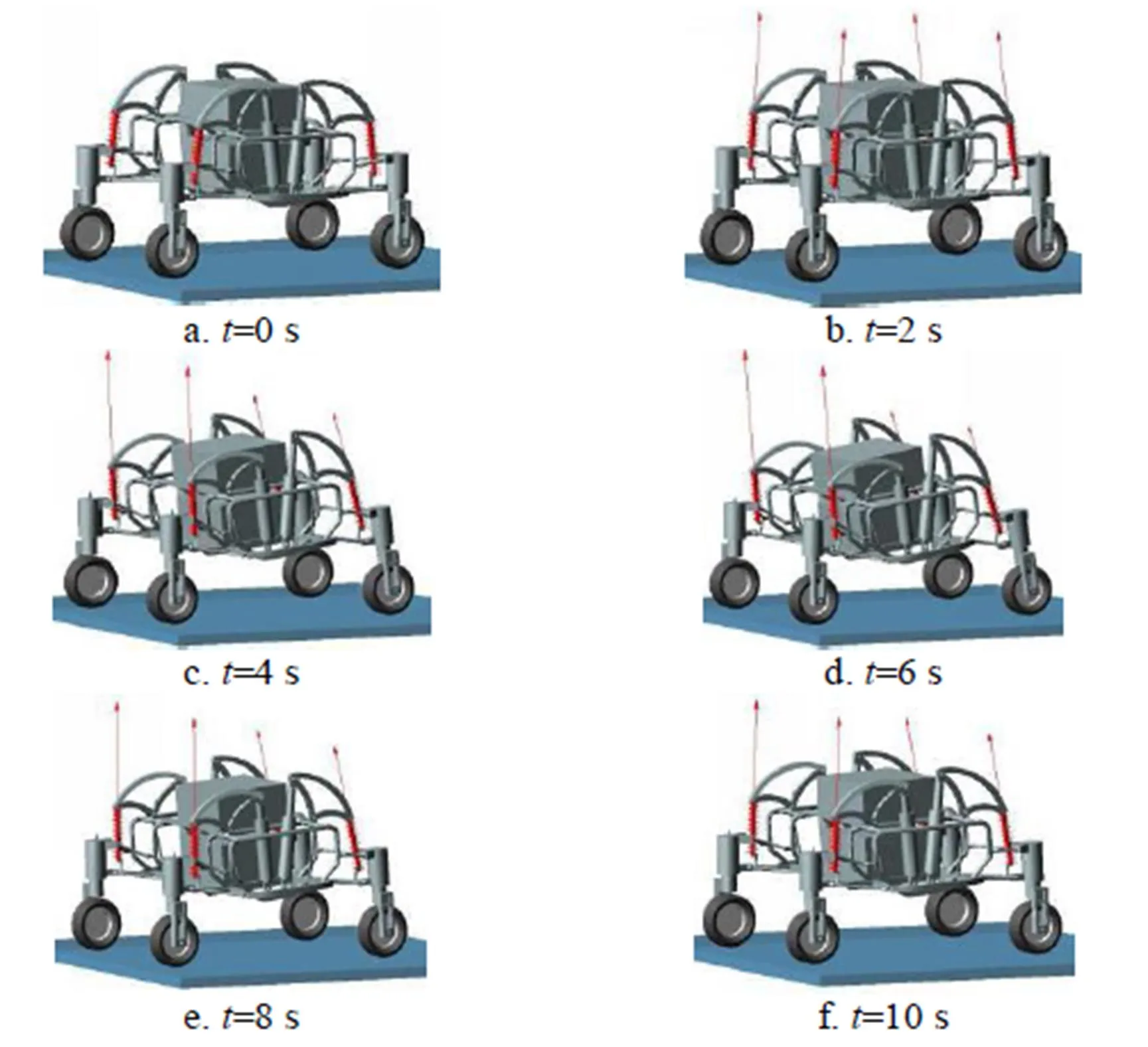
图9 轮腿机器人俯仰姿态调整过程
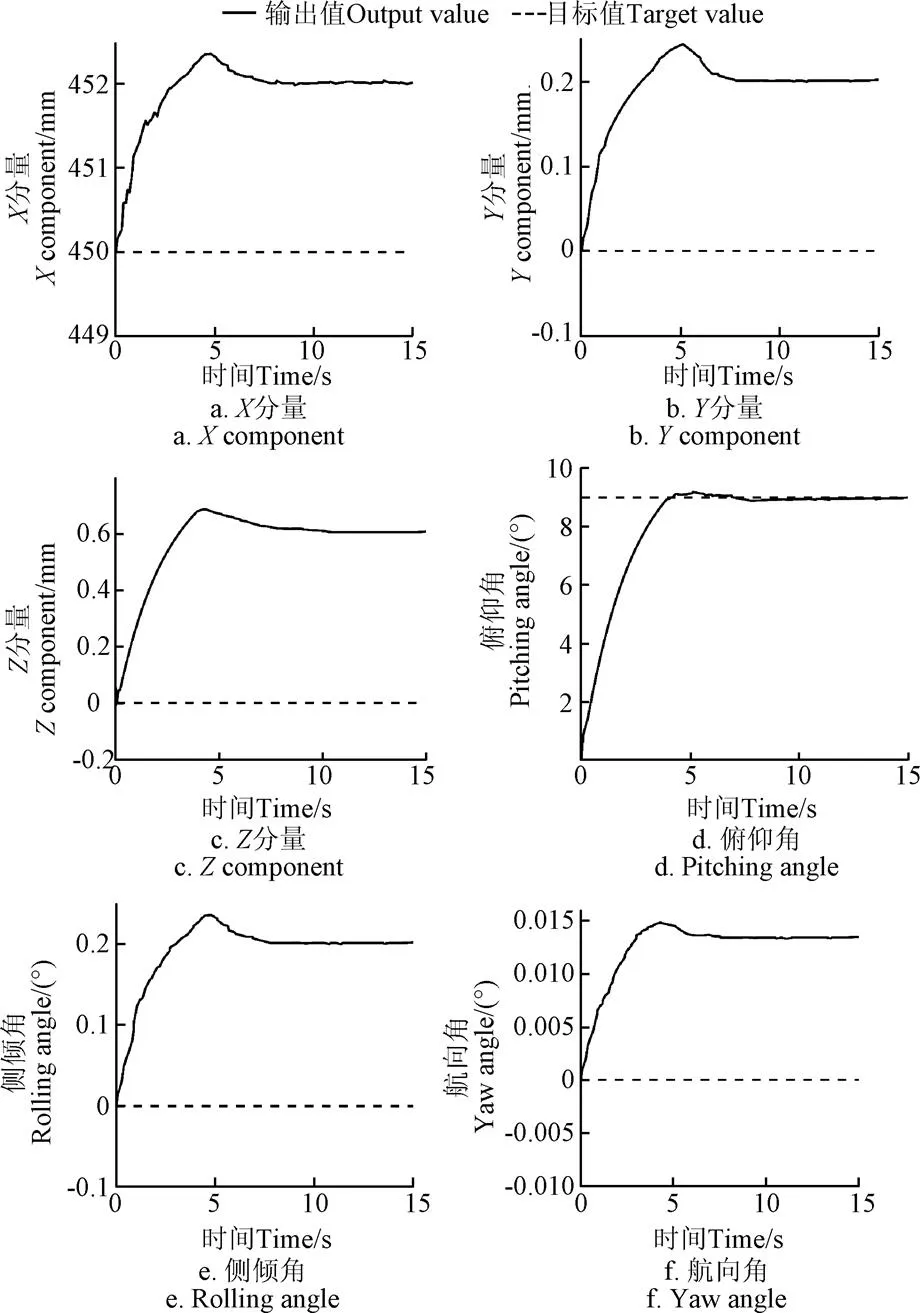
图10 位姿控制中目标值与输出值对比
表4为目标值与仿真输出值误差分析表,位置与姿态误差分别控制在0.2%、2%以内,出现误差的主要原因是因为选用的摩托车轮胎模型胎面为平面,导致调姿时胎肩与地面接触,引起机器人质心及姿态角的微量误差。

表4 目标值与仿真输出值误差分析
4 结论与讨论
为了改善轮腿机器人越障时的姿态问题,基于汽车主动悬架理念设计了一款新型轮腿式全地形移动机器人,该悬架系统不仅能对机器人本体在不平路面上起到隔振作用,而且具有主动调姿的功能。
针对轮腿机器人在越过田埂时出现的俯仰姿态及质心位置发生变化的问题,基于整机逆运动学模型,对轮腿机器人的位置和姿态进行解耦控制,并建立轮腿机器人的闭环姿态控制模型。同时为了验证所述运动学控制模型的正确性,加工了1/4轮腿模型,并进行试验验证,仿真结果与试验结果基本吻合,最大误差为1.5%。
采用MATLAB与ADAMS联合仿真对算法进行验证,结果表明位置与姿态均有很好的跟踪效果,位置与姿态误差分别控制在0.2%、2%以内,验证了算法的有效性,为轮腿机器人在农业领域的深入应用提供了参考。
由于整机模型为对称结构,单腿台架即能够对整机运动学控制及关节标定提供试验依据,后期若要进一步研究整机在不同工况下的运动特性,需加工整机模型,这也是作者下一步需完善的工作。
[1] 张金柱,金振林,张天浩. 并联驱动机械腿运动学静力学性能评价及几何参数设计[J]. 农业工程学报,2017,33(21):61-69.
Zhang Jinzhu, Jin Zhenlin, Zhang Tianhao. Kinematic/static performance evaluation and geometric parameter design of parallel-driving leg mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(21): 61-69. (in Chinese with English abstract)
[2] Shigehiko H, Kenta S, Satoshi Y, et al. Evaluation of a strawberry-harvesting robot in a field test[J]. Biosystems Engineering, 2010, 105(2): 160-171.
[3] Bechar A, Vigneault C. Agricultural robots for field operations: Concepts and components[J]. Biosystems Engineering, 2016, 149: 94-111.
[4] 陈刚,金波,陈鹰. 基于速度逆运动学的六足步行机器人位姿闭环控制[J]. 农业机械学报,2014,45(5):265-270.
Chen Gang, Jin Bo, Chen Ying. Position-posture closed-loop control of six-legged walking robot based on inverse velocity kinematics[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(5): 265-270. (in Chinese with English abstract)
[5] Raibert M, Blankespoor K, Nelson G, et al. Big dog the rough-terrain quadruped robot[J]. IFAC Proceedings Volumes, 2008, 41(2): 10822-10825.
[6] Zhuang H, Gao H, Liang D, et al. Method for analyzing articulated torques of heavy-duty six-legged robot[J]. Chinese Journal of Mechanical Engineering, 2013, 26(4): 801-812.
[7] 李研彪,李景敏,计时鸣,等. 一种3自由度并联拟人机械腿的动力学建模及伺服电机峰值力矩预估[J]. 兵工学报,2014,35(11):1928-1936.
Li Yanbiao, Li Jingmin, Ji Shiming, et al. Dynamic modeling and peak torque prediction of servo motor for a 3-dof parallel humanoid mechanical leg[J]. Acta Armamentarii, 2014, 35(11): 1928-1936. (in Chinese with English abstract)
[8] 荣誉,金振林,崔冰艳. 六足农业机器人并联腿构型分析与结构参数设计[J]. 农业工程学报,2012,28(15):9-14.
Rong Yu, Jin Zhenlin, Cui Bingyan. Configuration analysis and structure parameter design of six-leg agricultural robot with parallel-leg mechanisms[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(15): 9-14. (in Chinese with English abstract)
[9] 徐坤,丁希仑,李可佳. 圆周对称分布六腿机器人三种典型行走步态步长及稳定性分析[J]. 机器人,2012,34(2):231-241.
Xu Kun, Ding Xilun, Li Kejia. Stride size and stability analysis of a radially symmetrical hexapod robot in three typical gaits[J]. Robot, 2012, 34(2): 231-241. (in Chinese with English abstract)
[10] 徐坤,郑羿,丁希仑. 六轮腿式机器人结构设计与运动模式分析[J]. 北京航空航天大学学报,2016,42(1):59-71.
Xu Kun, Zheng Yi, Ding Xilun. Structure design and motion mode analysis of a six wheel-legged robot[J]. Journal of Beijing University of Aeronautics & Astronautics, 2016, 42(1): 59-71. (in Chinese with English abstract)
[11] 苏文海,李冰,袁立鹏,等. 立体坡面农业四足移动平台姿态控制策略与试验[J]. 农业工程学报,2018,34(4):80-91.
Su Wenhai, Li Bing, Yuan Lipeng, et al. Strategy and experiment of attitude control for quadruped mobile platform walking on three-dimensional slope used for agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 80-91. (in Chinese with English abstract)
[12] 张金柱,金振林,陈广广. 六足步行机器人腿部机构运动学分析[J]. 农业工程学报,2016,32(9):45-52.
Zhang Jinzhu, Jin Zhenlin, Chen Guangguang. Kinematic analysis of leg mechanism of six-legged walking robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(9): 45-52. (in Chinese with English abstract)
[13] Yasuhisa H, Wang Zhidong, Kenta Fukaya, et al. Transporting an object by a passive mobile robot with servo brakes in cooperation with a human[J]. Advanced Robotics, 2009, 23(4): 387-404.
[14] 张东胜,许允斗,姚建涛,等. 五自由度混联机器人逆动力学分析[J]. 农业机械学报,2017,48(9):384-391.
Zhang Dongsheng, Xu Yundou, Yao Jiantao. Inverse dynamic analysis of novel 5-dof hybrid manipulator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(9): 384-391. (in Chinese with Englishabstract)
[15] Grand C, Benamar F, Plumet F. Motion kinematics analysis of wheeled-legged rover over 3D surface with posture adaptation[J]. Mechanism & Machine Theory, 2010, 45(3): 477-495.
[16] 权龙哲,张冬冬,查绍辉,等. 三臂多功能棚室农业机器人的运动学分析及试验[J]. 农业工程学报,2015,31(13):32-38.
Quan Longzhe, Zhang Dongdong, Zha Shaohui, et al. Kinematics analysis and experiment of multifunctional agricultural robot in greenhouse with three arms[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(13): 32-38. (in Chinese with English abstract)
[17] 张东胜,许允斗,侯照伟,等. 五自由度混联机器人优化设计与运动学分析[J]. 农业工程学报,2016,32(24):69-76.
Zhang Dongsheng, Xu Yundou, Hou Zhaowei, et al. Optimal design and kinematics analysis of 5-dof hybrid serial-parallel manipulator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(24): 69-76. (in Chinese with English abstract)
[18] 阳涵疆,李立君,高自成. 基于旋量理论的混联采摘机器人正运动学分析与试验[J]. 农业工程学报,2016,32(9):53-59.
Yang Hanjiang, Li Lijun, Gao Zicheng. Forward kinematics analysis and experiment of hybrid harvesting robot based on screw theory[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(9): 53-59. (in Chinese with English abstract)
[19] 常勇,马书根,王洪光,等. 轮式移动机器人运动学建模方法[J]. 机械工程学报,2010,46(5):30-36.
Chang Yong, Ma Shugen, Wang Hongguang, et al. Method of kinematic modeling of wheeled mobile robot[J]. Journal of Mechanical Engineering, 2010, 46(5): 30-36. (in Chinese with English abstract)
[20] Alamdari A, Krovi V N. Static balancing of highly reconfigurable articulated wheeled vehicles for power consumption reduction of actuators[J]. Springer International Publishing, 2016, 3(1):15-31.
[21] 罗陆锋,邹湘军,程堂灿,等. 采摘机器人视觉定位及行为控制的硬件在环虚拟试验系统设计[J]. 农业工程学报,2017,33(4):39-46. Luo Lufeng, Zou Xiangjun, Cheng Tangcan, et al. Design of virtual test system based on hardware-in-loop for picking robot vision localization and behavior control[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(4): 39-46. (in Chinese with English abstract)
[22] 张鹏程,张铁. 基于矢量积法的六自由度工业机器人雅可比矩阵求解及奇异位形的分析[J]. 机械设计与制造,2011(8):152-154.
Zhang Pengcheng, Zhang Tie. Analysis on solution of 6D of robot jacobian matrix and singularity configuration based on vector product method[J]. Machinery Design & Manufacture, 2011(8): 152-154. (in Chinese with English abstract)
[23] 谢少荣,刘思淼,罗均,等. 一种混合驱动柔索并联仿生眼的轨迹规划[J]. 机器人,2015,37(4):395-402.
Xie Shaorong, Liu Simiao, Luo Jun, et al. Trajectory planning of a bionic eye using hybrid-driven cable parallel mechanism[J]. Robot, 2015, 37(4): 395-402. (in Chinese with English abstract)
[24] 宋小康,谈大龙,吴镇炜,等. 全地形轮式移动机器人运动学建模与分析[J]. 机械工程学报,2008,44(6):148-154.
Song Xiaokang, Tan Dalong, Wu Zhenwei, et al. Kinematics modeling and analyses of all-terrain wheeled mobile robots[J]. Chinese Journal of Mechanical Engineering, 2008, 44(6): 148-154. (in Chinese with English abstract)
[25] 郑楚婷,宋光明,乔贵方,等. 具有主动腰关节的四足机器人在间歇性对角小跑步态下的姿态平衡控制[J]. 机器人,2016,38(6):670-677.
Zheng Chuting, Song Guangming, Qiao Guifang, et al. Posture balance control of the quadruped robot with an activewaist joint during intermittent trot locomotion[J]. Robot, 2016, 38(6): 670-677. (in Chinese with English abstract)
[26] 潘希样,徐坤,王耀兵,等. 具有悬挂系统的轮腿式机器人设计与分析[J]. 机器人,2018,40(3):1-12.
Pan Xiyang, Xu Kun, Wang Yaobing, et al. Design and analysis of a wheel-legged robot with a suspension system[J]. Robot, 2018, 40(3): 1-12. (in Chinese with English abstract)
[27] 耶尔森・赖姆帕尔,赖姆帕尔,李旭东. 汽车悬架[M]. 北京:机械工业出版社,2013.
[28] Zhuang H, Gao H, Ding L, et al. Method for analyzing articulated torques of heavy-duty six-legged robot[J]. Chinese Journal of Mechanical Engineering, 2013, 26(4): 801-812.
[29] 牛雪梅,高国琴,刘辛军,等. 三自由度驱动冗余并联机构动力学建模与试验[J]. 农业工程学报,2013,29(16):31-41.
Niu Xuemei, Gao Guoqin, Liu Xinjun, et al. Dynamics modeling and experiments of 3-DOF parallel mechanism with actuation redundancy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(16): 31-41. (in Chinese with English abstract)
[30] Park S. Gait analysis of a quadruped walking robot with vertical waist-joint on slope[C]// Methods and Models in Automation and Robotics, 2009, 42(13): 507-512.
[31] Koopman B, van Asseldonk E H, van der Kooij H. Speed-dependent reference joint trajectory generation for robotic gait support[J]. Journal of Biomechanics, 2014, 47(6): 1447-1458.
[32] 陈志伟,金波,朱世强,等. 液压驱动仿生多足机器人单腿设计与试验[J]. 农业工程学报,2016,32(5):36-42.
Chen Zhiwei, Jin Bo, Zhu Shiqiang, et al. Design and experiment of single leg of hydraulically actuated bionic multi-legged robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(5): 36-42. (in Chinese with English abstract)
[33] 汪若尘,谢健,叶青,等. 直线电机式主动悬架建模与试验研究[J]. 汽车工程,2016,38(4):495-499.
Wang Ruochen, Xie Jian, Ye Qing, et al. Study on coordination control of body posture for active suspension with linear motor[J]. Chinese Journal of Automotive Engineering, 2016, 38(4): 495-499. (in Chinese with English abstract)
Pitching attitude closed loop control of wheel-legged all terrain mobile robot with active suspension
Ma Fangwu, Ni Liwei, Wu Liang※, Nie Jiahong
(1.,,130012,; 2.,,130012,)
With the attention of agricultural robot research and development in recent years, many kinds of agricultural robots have been developed according to the different focus of the problem solving. Because the wheel-legged robots have excellent obstacle surmounting ability, low energy consumption and stable terrain adaptability compared with other mobile platforms, it has been widely used in various fields of precision agriculture, military investigation, resource exploration and so on. The position and attitude will be inevitably changed when the wheel-legged robots in operation, and the working accuracy and working performance will be affected due to the complexity of the working environment. In order to control the position and attitude, reduce the influence of the non paved pavement to the robot's attitude and position, ensure the stability of the robot, a new type of wheel-legged all terrain mobile robot with active suspension was designed in this study based on the multi-link independent suspension system of the vehicle. Multi-link independent suspension had mature application experience in automobile manufacture, but seldom applied in wheel-legged robot. The suspension system was the general name of the device that connected the body and the wheel. It can be roughly divided into the independent suspension system and the dependent suspension system, of which the non independent suspension system referred to the connection between the two wheels, and the pulsation of one side of the wheel affected the beat of the other side, while the wheels in the multi-link independent suspension system had their respective suspension mechanisms, which were independent of each other and did not interfere with each other, this improved the stability and comfort of the robot. By the suspension system, the vibration of the robot can be effectively reduced, the impact between the parts of the robot was buffered, and the economy and reliability of the robot can be improved. Then on the basis of establishing the kinematics model of wheel-legged robot, the inverse kinematic equations was established by Vector method and Euler formula, and the relationship between actuator stroke and suspension rotation angle was obtained, meanwhile, the position and attitude control of wheel-legged robot was decoupled. In order to ensure the reliability and correctness of the inverse kinematics and kinematics control model of the robot, the 1/4 robot test rig was manufactured and a 1/4 bench model test was carried out on the basis of theoretical analysis. The simulation results were basically consistent with the bench test data, and the maximum error was within 1.5%, the correctness of the relationship between the motion pitch angle of the robot body and the rotation angle of each leg joint was verified under the condition of the participation of the kinematic model. Then, a robot pitching attitude control strategy was built in MATLAB with proportional control to realize the closed loop control under the condition that the center of robot centroid was fixed, Finally, the robot virtual model was built in ADAMS, and MATLAB and ADAMS were used to establish the joint simulation. The simulation results showed that the pitch attitude and the centroid position of the robot had a good tracking effect, and the position error and attitude error of the centroid were 0.2% and 2%, respectively. Therefore, the correctness of the closed-loop attitude control strategy of the wheel-legged robot was verified. The algorithm can maintain the position and attitude of the wheel-legged robot and reduced centroid offset when crossing obstacles, it enhanced the performance of wheel-legged robot as the agricultural robot, the performance of the all terrain mobile robot with active suspension provides a reference for the design of the motion position and attitude control of the modern agricultural robot.
robots; kinematics; control; models; joint simulation
10.11975/j.issn.1002-6819.2018.20.003
TP242.6
A
1002-6819(2018)-20-0020-08
2018-04-23
2018-06-29
国家自然科学基金(51705185);国家重点研发计划(2017YFC0601604)
马芳武,国家“千人计划”专家,教授,博士生导师,主要从事车辆的智能化、电动化、轻量化研究。Email:mikema@jlu.edu.cn.
吴 量,讲师,博士后,主要从事车辆的智能化、电动化、轻量化研究。Email:15143185852@163.com
马芳武,倪利伟,吴 量,聂家弘. 主动悬架轮腿式全地形移动机器人俯仰姿态闭环控制[J]. 农业工程学报,2018,34(20):20-27. doi:10.11975/j.issn.1002-6819.2018.20.003 http://www.tcsae.org
Ma Fangwu, Ni Liwei, Wu Liang, Nie Jiahong. Pitching attitude closed loop control of wheel-legged all terrain mobile robot with active suspension[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(20): 20-27. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.20.003 http://www.tcsae.org
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
汽车实用技术(2021年3期)2021-02-24
中国惯性技术学报(2020年4期)2020-12-14
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
发电设备(2020年2期)2020-04-06
电子技术与软件工程(2019年6期)2019-04-26
电子制作(2018年11期)2018-08-04
科技与创新(2018年12期)2018-06-22
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
