基于约束卡尔曼滤波的城市轨道交通线网客流 OD 实时估计研究
2018-11-01 08:33伍元忠
铁道运输与经济 2018年10期
刘 洋,凌 力,伍元忠,张 宁,王 健
(1.中铁第四勘察设计院集团有限公司 通信信号设计研究处,湖北 武汉 430063;2.东南大学 智能运输系统研究中心轨道交通研究所,江苏 南京 210096;3.南京地下铁道有限责任公司 建设分公司,江苏 南京 210024)
0 引言
随着轨道交通线网规模的不断扩大,客流需求分布呈现出动态化、多样化、复杂化的特点,加大了运输组织策略制订的难度。目前,通过自动售检票系统(AFC)记录的乘客进出站站点和时间信息,能够获取任意统计时间间隔下的线网客流OD信息[1],但此信息的获取相当于历史客流OD信息的统计。为提高轨道交通动态化运营管理与控制水平,需要建立合适的OD实时估计模型来估计较短时间范围内的线网客流OD需求。因此,基于线网客流数据的OD实时估计具有重要的实际意义。
从20世纪80年代起,国内外学者针对OD实时估计问题开展了大量的研究,通过对研究成果的归纳总结,主要可分为以下3个方面。其一,既有OD流与采集交通流之间的流量关系大都是在断面流量容易获取的基础上建立的,但轨道交通中断面客流信息却很难获取[2]。其二,既有OD实时估计模型的研究主要集中于道路交通领域,而轨道交通领域研究相对较少,且既有OD实时估计模型中未考虑到轨道交通线网结构及乘客出行特征等[3]。其三,轨道交通线网通常包含上万个OD对,既有OD实时估计模型中,最小二乘法、极大熵法等方法在运算效率方面存在着不足,可能难以满足线网应用的时效性要求,相比而言,卡尔曼滤波方法的运算效率较高、估计精度良好[4]。综上所述,城市轨道交通线网客流OD实时估计需要结合客流数据信息、乘客运输过程及运营管理时效性需求。据此,在国内外OD实时估计研究基础上,利用线网客流数据,建立基于卡尔曼滤波的线网客流OD实时估计模型来估计线网客流OD需求,为城市轨道交通运营管理部门提供决策参考。
1 城市轨道交通线网客流 OD实时估计分析
1.1 线网客流 OD 实时估计过程
城市轨道交通线网客流OD实时估计是以历史客流数据及实时进出站客流数据为基础,通过分析客流动态传播过程,构建动态流量关系,并以此为基础,建立模型来估计较短时间间隔内的线网客流OD需求。由于城市轨道交通AFC系统能够实时采集进出站客流数据,因而实时进出站客流及历史客流数据容易获取。通过历史乘客出行信息,能够获取乘客行程时间分布情况,用于辅助构建OD流与进出站客流间的动态流量关系。结合以上输入数据信息及基础流量关系,可以建立线网客流OD实时估计状态空间模型,利用卡尔曼滤波方法进行求解,以获得实时的OD估计值,并对其进行有效性检验。基于卡尔曼滤波方法的线网客流OD实时估计过程如图1所示。
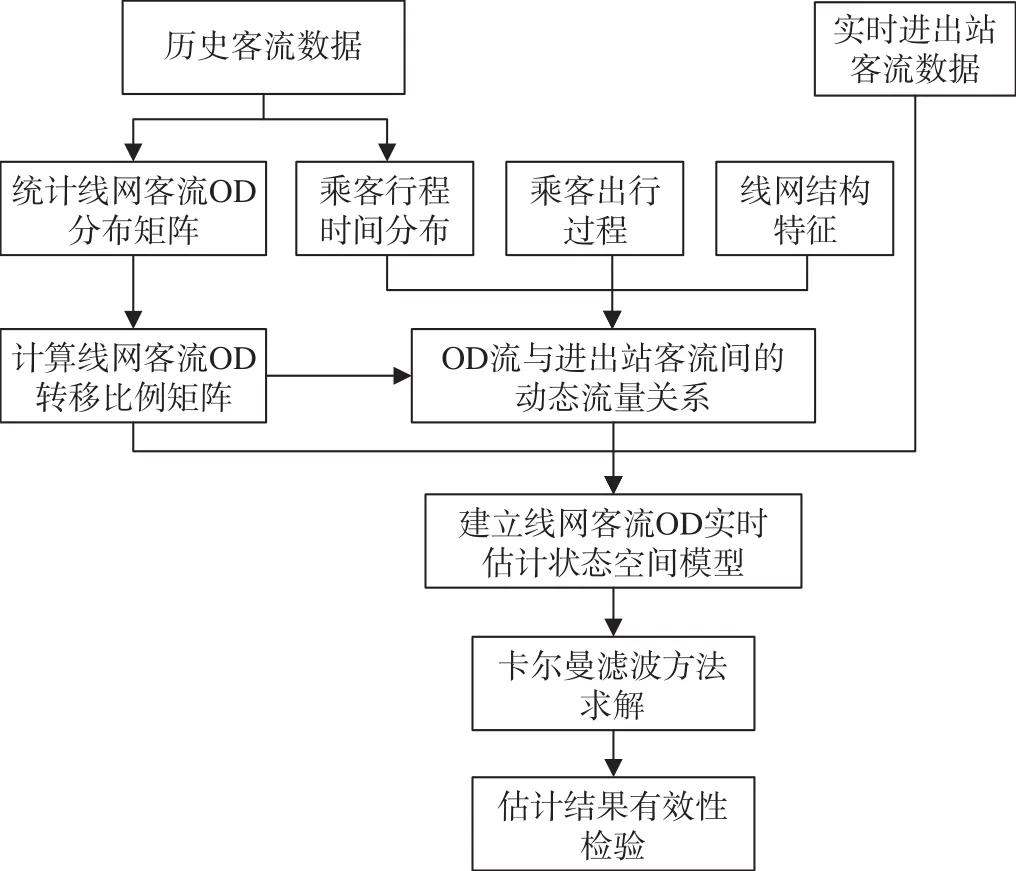
图1 基于卡尔曼滤波方法的线网客流OD实时估计过程Fig.1 Real-time OD estimation process of line network passenger flow based on Kalman filter method
1.2 线网客流 OD 实时估计关键问题
城市轨道交通具有线网结构复杂、OD对数目庞大、历史客流数据资源丰富、列车准点率高等特点,因而在OD实时估计过程中,需要结合城市轨道交通特征,对关键问题进行梳理,为构建线网客流OD实时估计模型奠定基础。参考道路交通领域OD实时估计关键问题[5],城市轨道交通线网客流OD实时估计的关键问题主要包含以下方面。
(1)历史OD信息的利用。对于某一特定的估计时段,根据进出站客流信息所建立的等式约束方程一般不大于2n (n表示站点总数),其远远小于未知的待估计OD对总数目n (n + 1)个,因而OD估计存在不唯一解,需要引入其他信息辅助设定优化目标来保证解的唯一性。AFC系统中有着丰富的乘客出行数据资源,如何利用乘客出行信息来辅助OD实时估计尤为重要。
(2)状态变量的选取。状态变量的选取通常可分为4类:OD流量、OD转移比例、路段断面流量、偏差变量。OD流量能够清晰地反映出交通网络中OD对间的实际需求量,既有模型中很多均采用OD流量作为模型状态变量,但OD流量表示方式可能造成计算复杂,影响运算效率。OD转移比例虽然不能够直接反映出OD间的具体需求,却能够较为直观地反映出节点流入交通量的去向比例结构,因而其在OD实时估计模型状态变量的选取中应用较为广泛。路段断面流量作为状态变量来建立OD实时估计模型,可以提高OD实时估计精度。然而,城市轨道交通中难以采集断面流量,通常不将断面流量作为状态变量。偏差变量指当前时段OD流量与历史同期OD流量的偏差所组成的变量。偏差变量作为状态变量可能使得建立模型时产生的随机误差难以服从高斯白噪声,影响OD估计精度。综上所述,在进行OD实时估计时,将OD转移比例作为模型的状态变量。
(3)基础流量关系的构建。对于某一估计时段t的站点i来说,站点i的进站客流量不一定在当前时段内出站。此外,站点i的出站客流量并不仅仅包括当前时段到达站点i的客流,还包括在时段 t之前出发在当前时段t到达站点i的客流。综上分析,对于当前时段的线网客流OD实时估计需要考虑到先前多个时段客流信息的影响,即线网OD客流信息的采集存在着时滞性特征,线网客流OD信息的时滞性特征如图2所示。
(4)估计时间间隔的确定。考虑客流信息采集特点及客流OD信息应用需求,给出OD实时估计时间间隔的确定原则,主要包含以下2个方面:①满足应用需求,反映客流动态变化特征。如果估计时间间隔较短,线网客流特征不够明显,其稳定性特征较差,导致难以描述客流在线网中的动态传播过程;如果估计时间间隔较长,线网客流变化规律虽然较为明显,但却难以为动态化运输组织策略的制订提供有效的参考。②考虑模型运算能力。当估计时间间隔较短时,乘客完成一次出行过程需要跨越更多的估计时间段个数,这使得动态流量分配参数的计算显得更加复杂。考虑以上2个原则,决定对估计时间间隔为10 min与15 min条件下的OD实时估计问题进行深入研究。

图2 线网客流OD信息的时滞性特征Fig.2 Time-delay characteristics of OD information in line network passenger flow
2 城市轨道交通线网客流OD实时估计模型
2.1 基本流量关系构建
考虑线网客流信息采集的时滞性特征来构建基础流量关系是建立OD实时估计模型的首要步骤。结合封闭网络中的客流量守恒关系,可以得到进站量的关系表达式如公式 ⑴ 所示。

式中:li(k)为车站i在时段k内的进站量;qij(k)为在第k个时段内由站点i进站且从站点j出站的客流量;S为车站节点集合,S ={1,2,…,i,j,…,n}(包含站点1,站点2,…,站点i,站点j,…,站点n),n为站点的个数;T为估计时间段集合,T ={1,2,…,k,t,…}(包含时段1,时段2,…,时段k,时段t,…)。
客流量的关系表达式如公式 ⑵ 所示。

式中:bij(k)为OD对[i,j]间的OD转移比例,表示第k个时段内由i站进站的乘客中去往j站的客流占i站总进站客流的比例。
出站量的关系表达式如公式 ⑶—⑹ 所示。

式中:Oj(t)为车站j在时段t内的出站量;M为线网中任意OD对间的乘客行程时间最大跨越时间段数,M = 0,1,…,m;Ii(t - m)为车站i在t - m时段的进站量;bij(t - m)为t - m时段内由i站进站的乘客中去往j站的客流占i站总进站客流的比例;t)为客流出站到达系数,表示OD流在时段k 从车站i出发且在时段t内到达目的车站j的比例,t≥k;x为乘客行程时间;Fij(x)为OD对[i,j]间的乘客行程时间为x的乘客数量;[t-,t+]为任意OD对[i,j]间在第k个时段内由站点i进站的客流出发去往目的站点j的客流中在第t个时段内到达站点j的行程时间范围,且t-= (t - k)·τ,t+=(t - k + 1)·τ,τ表示OD实时估计时间间隔;Δtmin和Δtmax分别表示在第k个时段内由站点i进站以站点j为目的车站的客流在第t个时段内到达站点j的最小行程时间和最大行程时间。
特别的是,研究以AFC系统中大量历史乘客出行数据为基础,将任意OD对间统计以1 min为时间间隔的乘客行程时间分布,根据公式 ⑹ 计算出某一行程时间出现的统计概率,并将此概率作为实际乘客行程时间为此时间的比例。
2.2 状态空间模型建立及求解
状态空间模型的核心在于建立状态转移方程和观测方程,以下将OD转移比例作为状态变量,阐述状态转移方程与观测方程的构建过程。
(1)状态转移方程。由于同期客流的线网客流OD分布具有一定的相似性特征,因而结合状态空间模型的基本形式,可以建立状态转移方程如下。

式中:B (t),B (t - 1)分别为第t,t - 1个时段的系统状态向量,B (t)是由bij(t)所组成的Rod×1维矩阵,且B (t) = [bij(t)]Rod×1;Rod为线网客流OD对的总数目;F (t),G (t)均表示系统状态转移矩阵,并且随着时间段变化而变化;B*(t)为第t个时段的历史状态向量,是由(t)组成的Rod×1维矩阵,并且B*(t) =(t)];W(t)为高斯白噪声矩阵。Rod×1
(2)观测方程。借鉴Lin[6]提出的方法,利用OD转移比例均值来代替约束方程中涉及的前向多个时段内的OD转移比例,将公式⑶转化为

式中:O (t)为系统第t个时段的出站观测向量,是由[Oj(t)]组成的n×1维矩阵;H (t)为系统第t个时段的观测矩阵,是由时变n×Rod维矩阵;(t)是由第t个时段的OD转移比例均值(t)构成的Rod×1维矩阵;V (t)为高斯白噪声矩阵,一般称之为观测噪声,表示构建观测方程时所产生的误差矩阵。
在以上状态空间模型基础上,可以采用卡尔曼滤波方法来进行求解,得出系统状态估计值。标准卡尔曼滤波方法是以最小均方差为目标,通过迭代递推方法,实现OD矩阵的实时更新,其主要包含5步基本迭代递推步骤[7],算法公式如下。

由公式 ⑼ 可以看出,标准卡尔曼滤波方法通常假设第t个时段内的系统状态变量存在先验估计值(t)及后验估计值(t),其中,后验估计值即为标准卡尔曼滤波方法估计值,因而估计系统存在着先验估计误差方差(t)及后验估计误差方差(t)。第t个时段内的后验估计值是通过观测变量O (t)来对当前时段的先验估计值进行修正而获得的,即标准卡尔曼滤波方法是以“估计—观测—更新”的方式对系统状态变量进行迭代递推估计。
2.3 考虑约束条件的卡尔曼滤波估计结果修正
相关研究指出,标准卡尔曼滤波方法没有考虑到系统状态变量所应满足的约束条件。当系统的OD需求分布结构发生较大的波动时,可能会由于状态变量未满足约束条件导致OD估计误差难以控制。因此,如何设计相应的目标优化函数,使得系统状态变量估计值同时满足等式约束和不等式约束,是提高卡尔曼滤波方法估计精度的关键。为保证OD估计精度,建立基于约束卡尔曼滤波方法的估计修正模型如下。

由公式 ⑽ 可以看出,约束卡尔曼滤波估计值是以修正估计值与实际值的均方误差最小为优化目标,且使模型状态变量估计值满足约束条件的解。
为以上约束修正问题构建拉格朗日乘子函数,可得

式中:λ和μ表示拉格朗日乘子向量。
由卡尔曼滤波的性质可以将公式 ⑽ 转化为
通过求解不等式约束库恩—塔克条件[8],可得
式 中:I表 示 Rod×n维 的 单 位 矩 阵;(t) 为(t)的第l个元素;μk为向量μ的第l个元素。令Z =(I - XT(XXT)-1X ),则拉格朗日乘子向量μ的迭代搜索计算方法如下

3 案例分析
以南京地铁线网(共包含6条线路,113个车站,12 656个OD对)2016年4月19日的实际客流数据为例,估计时段为6 ∶ 00—23 ∶ 00,估计时间间隔为10 min和15 min。选取OD转移比例作为状态变量,构建线网客流OD间的基本流量关系,建立状态空间模型以及基于约束卡尔曼滤波方法的估计修正模型,选取OD估计精度检验指标,利用Matlab软件进行计算,对基于标准卡尔曼滤波方法和基于约束卡尔曼滤波方法的线网客流OD估计模型进行OD估计精度检验分析。
3.1 OD 估计精度检验指标
在OD估计精度检验方面选取平均相对误差(MRE)和均方根误差(RMSE)作为评价指标,其计算方法如下。
式中:Avg (MRE)和Avg (RMSE)表示全天总体平均相对误差和均方根误差的平均值;MRE (t)和RMSE (t)分别表示第t个时段的分时段平均相对误差和均方根误差。
3.2 OD估计精度分析
基于线网客流OD实时估计模型,对比标准卡尔曼滤波方法和约束卡尔曼滤波方法在不同时间间隔下线网客流OD实时估计状态空间模型的总体估计精度如表1所示。

表1 线网客流OD实时估计状态空间模型的总体估计精度Tab.1 Overall accuracy of real-time estimation of state space model of line network passenger flow OD
从表1可以看出:①在10 min和15 min估计时间间隔下,约束卡尔曼滤波方法的估计精度比标准卡尔曼滤波方法均提高10%左右;②15 min时间间隔的总体估计误差均小于10 min时间间隔的总体估计误差;③约束卡尔曼滤波方法的总体估计误差在20%以内。
通过进一步对比10 min和15 min估计时间间隔条件下的分时段平均相对误差发现:①在不同时段,约束卡尔曼滤波方法均比标准卡尔曼滤波方法的平均相对误差有所降低;②工作日早晚高峰时段的线网客流OD估计误差明显小于平峰时段估计误差;③15 min和10 min估计时间间隔下的早晚高峰线网客流OD估计相对误差基本在10%以内;④约束卡尔曼滤波方法在不同估计时间间隔条件下的MRE值基本在20%以内。
综上,通过考虑约束条件对卡尔曼滤波方法进行修正,能够提高OD估计精度,并且约束卡尔曼滤波方法的总体估计效果和分时段估计效果较为良好。
4 结束语
城市轨道交通线网客流OD实时估计结果能够反映线网客流OD需求的动态分布结构,是运营管理部门制订动态运输组织策略的重要依据。该研究成果表明,基于约束卡尔曼滤波方法的城市轨道交通线网客流OD动态估计状态空间模型的估计效果良好,能为线网客流实时分布预测及列车实时调度策略提供关键的基础数据,以及为运营管理部门提供决策支持。由于城市轨道交通线网中实际采集的客流数据信息有限,OD实时估计精度有待进一步提高,如何融合利用更多的检测信息,比如换乘客流信息、乘客手机信令数据等来提高OD估计精度,还有待进一步深化研究。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
智能计算机与应用(2020年10期)2020-03-18
铁道通信信号(2019年5期)2019-10-10
铁道通信信号(2019年12期)2019-05-21
铁道通信信号(2019年2期)2019-03-26
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09