大规模GNSS网发展及数据处理现状
2018-11-02 10:07李林阳张学东李崇辉吕志平
测绘通报 2018年10期
李林阳,张学东,黄 娴,李崇辉,吕志平
(1. 信息工程大学地理空间信息学院,河南 郑州 450001; 2. 31439部队,辽宁 沈阳 110000;3. 河南工业大学,河南 郑州 450001)
发展卫星导航系统已成为体现国家综合实力的重要标志,随着我国北斗卫星导航系统(BDS)的运行服务,美国GPS与俄罗斯GLONASS系统的现代化,以及欧洲Galileo系统的建设,多系统兼容互操作已成为卫星导航领域的核心议题。卫星导航定位基准站网不仅是提供国家、区域、全球高精度时空基准的重要基础设施,也是导航与位置服务、精密卫星定轨、地质灾害监测等工程和科学研究的重要支撑[1],地面基准站网的规模在不断扩大,GNSS数据总量呈倍增趋势。大规模GNSS网的发展面临着不少机遇和挑战,寻求GNSS大网数据的快速处理成为当前的研究热点,受到越来越多的关注和重视[2-6]。
1 大规模GNSS网发展现状
1.1 空间段
各大卫星导航系统都在加快建设与部署或升级与现代化,而提供多于两个频点的信号是未来GNSS的重要特征与优势[7]。如表1所示,截至2017年11月30日,在轨运行的导航卫星数量已达107颗,表中MEO为中圆地球轨道(medium earth orbit),GEO为地球静止轨道(geostationary orbit),IGSO为倾斜地球同步轨道(inclined geosynchronous orbit)。
表1在轨运行导航卫星数量统计(截至2017年11月30日)
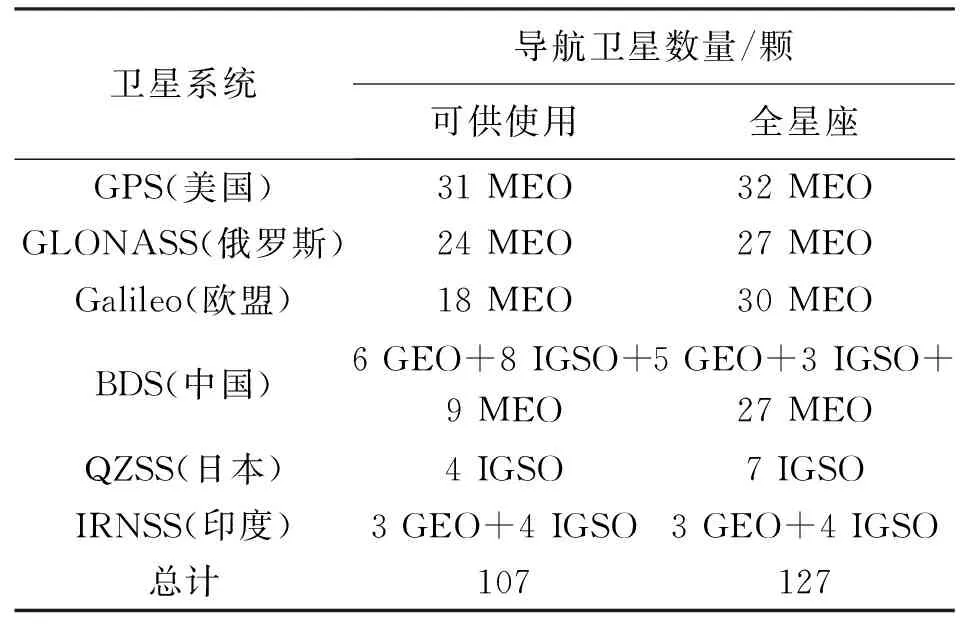
卫星系统导航卫星数量/颗可供使用全星座GPS(美国)31 MEO32 MEOGLONASS(俄罗斯)24 MEO27 MEOGalileo(欧盟)18 MEO30 MEOBDS(中国)6 GEO+8 IGSO+9 MEO5 GEO+3 IGSO+27 MEOQZSS(日本)4 IGSO7 IGSOIRNSS(印度)3 GEO+4 IGSO3 GEO+4 IGSO总计107127
如图1所示,新兴导航系统空间段都提供至少3个频率信号,GPS系统现代化进程中双频卫星也逐步由三频卫星所取代,BDS采用全星座三频设计,Galileo则提供4个频率的服务。
以2017年9月24日00:00:00秒为例,全球范围内的可见卫星数如图2所示。从图中可以看出,多系统条件下的可见卫星数量显著增加,任何地区的可见卫星数量不低于15颗,受目前BDS提供区域导航定位服务的限制,亚太地区的可见卫星数最多,平均超过了30颗。相较于单一的GPS,多系统融合不仅能够扩展GNSS应用的地域范围,增加可见卫星数量和观测值类型,而且可以优化卫星几何构型,缓解高山、城市峡谷等对PNT(positioning,navigation and timing)用户的影响,进一步提升服务的可用性、精度和可靠性[8]。
图1 多频GNSS星座组成
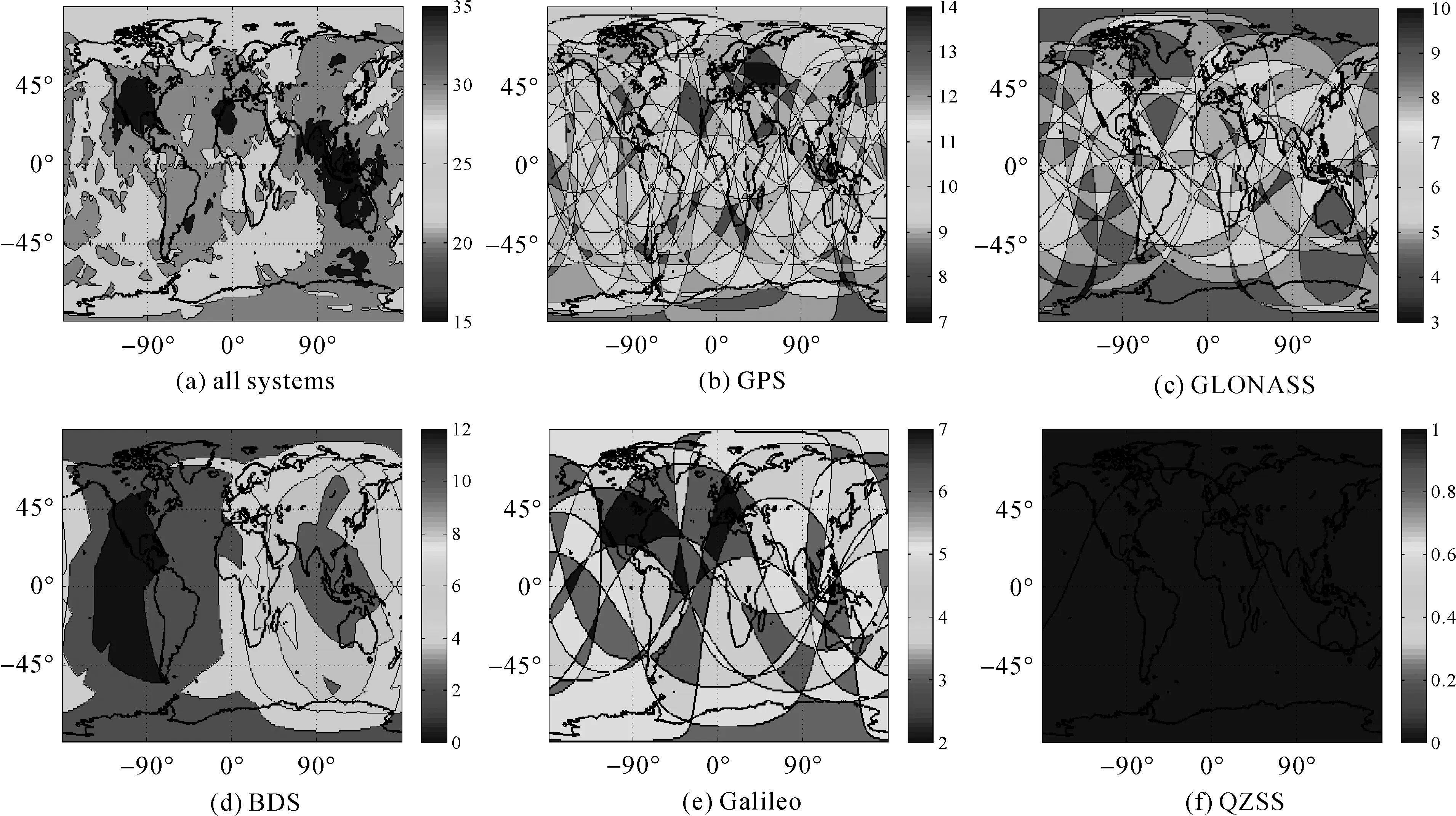
图2 全球范围内的可见卫星数(2017年9月24日00:00:00)
1.2 地面段
与空间段对应的是,全球范围内多个国家、地区、组织、行业和部门建立了或正在建设不同用途和功能的、包含数百甚至上千个参考站的GNSS大型观测网络,基准站网得到了快速发展。我国已建成上千个连续运行参考站(CORS)。整合独立型CORS、基准站更多、层次更高的联合型CORS也陆续开始组网[9],GNSS网的规模越来越大。同时,地面段也在不断更新与升级,如国际GNSS服务组织(International GNSS Service,IGS)正在实施的多系统试验计划(multi-GNSS experiment,MGEX)[10-11],以及我国北斗地基跟踪站网的布设、北斗地基增强系统全国“一张网”的建设[12]和我国开展的全球连续监测评估系统(iGMAS)的建设和运行[13]。
1.3 数据规模
GNSS已经进入了上万个全球参考站、超过100颗导航卫星的多系统多频信号时代。如图3 IGS的数据中心CDDIS存储的数据总量所示,500个IGS跟踪站对应的数据规模已逐步达到近20 TB。
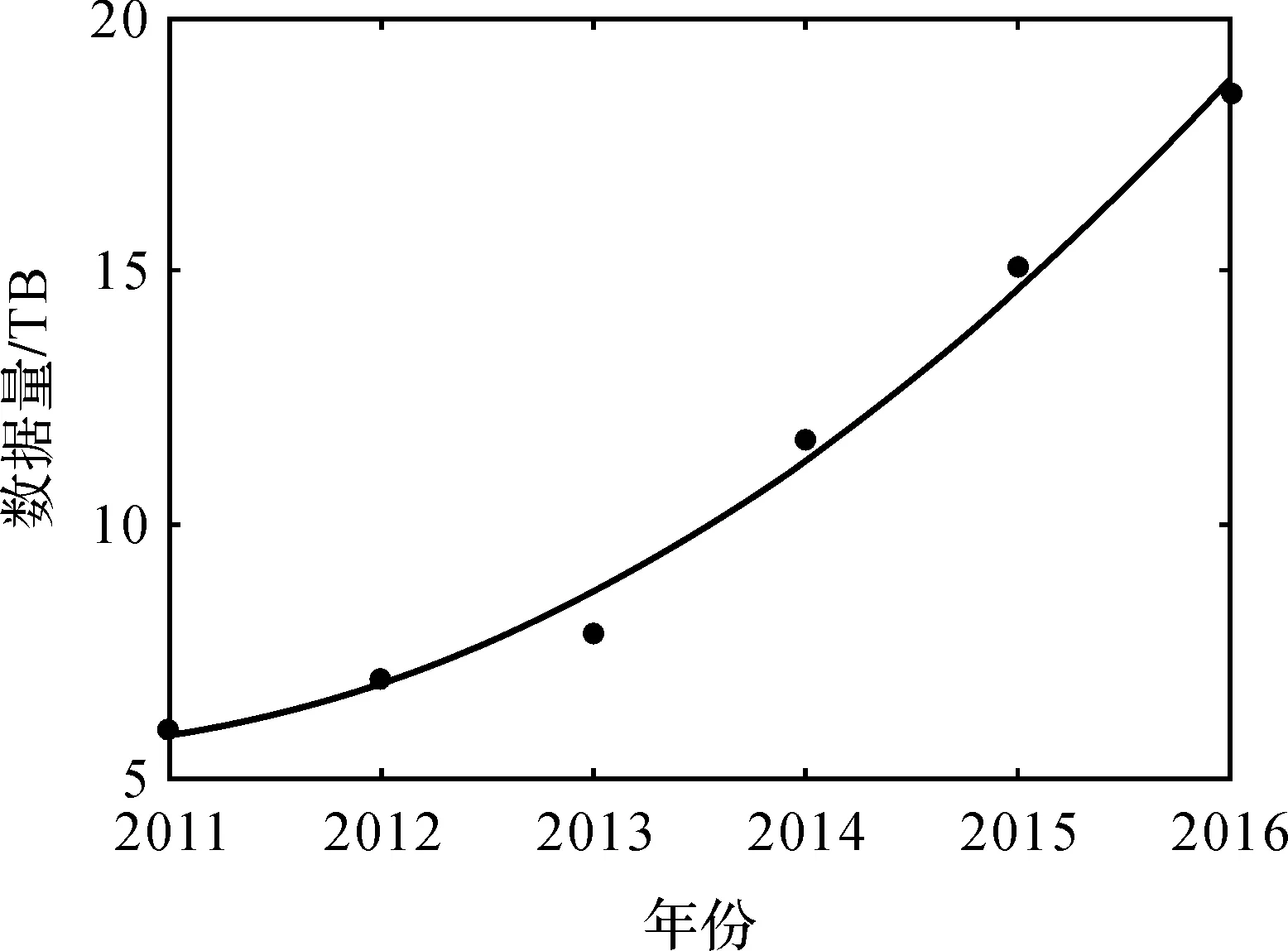
图3 CDDIS存储的数据规模
大规模GNSS网数据同时也是位置大数据(location big data,LBD)[14-15]和时空大数据[16]的重要组成部分,同样也具有大数据的5V特性[17]:Volume(海量)、Velocity(快速)、Variety(多样)、Veracity(精确)和Value(价值)。
2 GNSS大网数据处理方法
2.1 存储与管理
GNSS数据管理是解算和应用的基础,GNSS数据增长的速度远远超过存储技术进步带来的成本降低的速度[17],传统的SAN(storage area network)和NAS(network-attached storage)在容量和性能的扩展上存在瓶颈,集中式数据管理方式,如文件传输协议(FTP)和关系数据库(RDBMS),难以满足高并发读写和访问、高扩展性和可用性的需求,集中式存储方法已不能满足大规模GNSS数据存储应用的需要[6]。研究表明,云存储是解决海量GNSS数据存储瓶颈的一种有效途径[18]。2014年,美国卫星导航系统与地壳形变观测研究大学联合体(University NAVSTAR Consortium,UVAVCO)提出了GNSS数据云存储的需求和规划[19];刘枫等设计了云GNSS管理体系,并基于Hadoop设计了CNDMA实现模型[20];李林阳等提出了GNSS数据分布式存储与解算体系结构,基于HDFS(Hadoop distributed file system)改进了GNSS数据存储目录结构,基于HBase设计了GNSS数据存储表结构[6];针对HDFS处理海量GNSS小文件效率不高的问题,结合GNSS数据类型、特点及存储过程,提出了一种GNSS小文件高效云存储方法,优化了GNSS小文件的写入、读取、添加和删除策略[21]。
2.2 解算策略及其改进
基于非差和双差模式的解算方法是GNSS大网数据解算的两种主要策略。对于n个测站,非差模式下的时间复杂度为O(n)(O(·)表示处理时间量级阶数的函数,O(n)为线性阶的时间复杂度),但其收敛时间较长,浮点解定位精度低于双差网解[22],并且相关性较差,不利于整网平差[23]。双差模式下的时间复杂度为O(n3),如图4所示,以GAMIT双差网解为例,其采用全网全基线组合,随着GNSS网规模的扩大,处理时间呈几何倍增加,难以满足GNSS大网快速处理的需求。GNSS数据解算不仅需要更高性能的计算机和大量的计算时间,更为重要的是,基于双差模式,大多数GNSS数据软件同时解算的测站数小于100个,如GAMIT编译时受MAXSIT参数的限制,最多同时解算99个测站。如果同时处理200个及以上测站(如Bernese、GIPSY等),则需消耗大量的计算机硬件资源和时间,严重影响数据解算效率,并导致解算结果的滞后[1]。
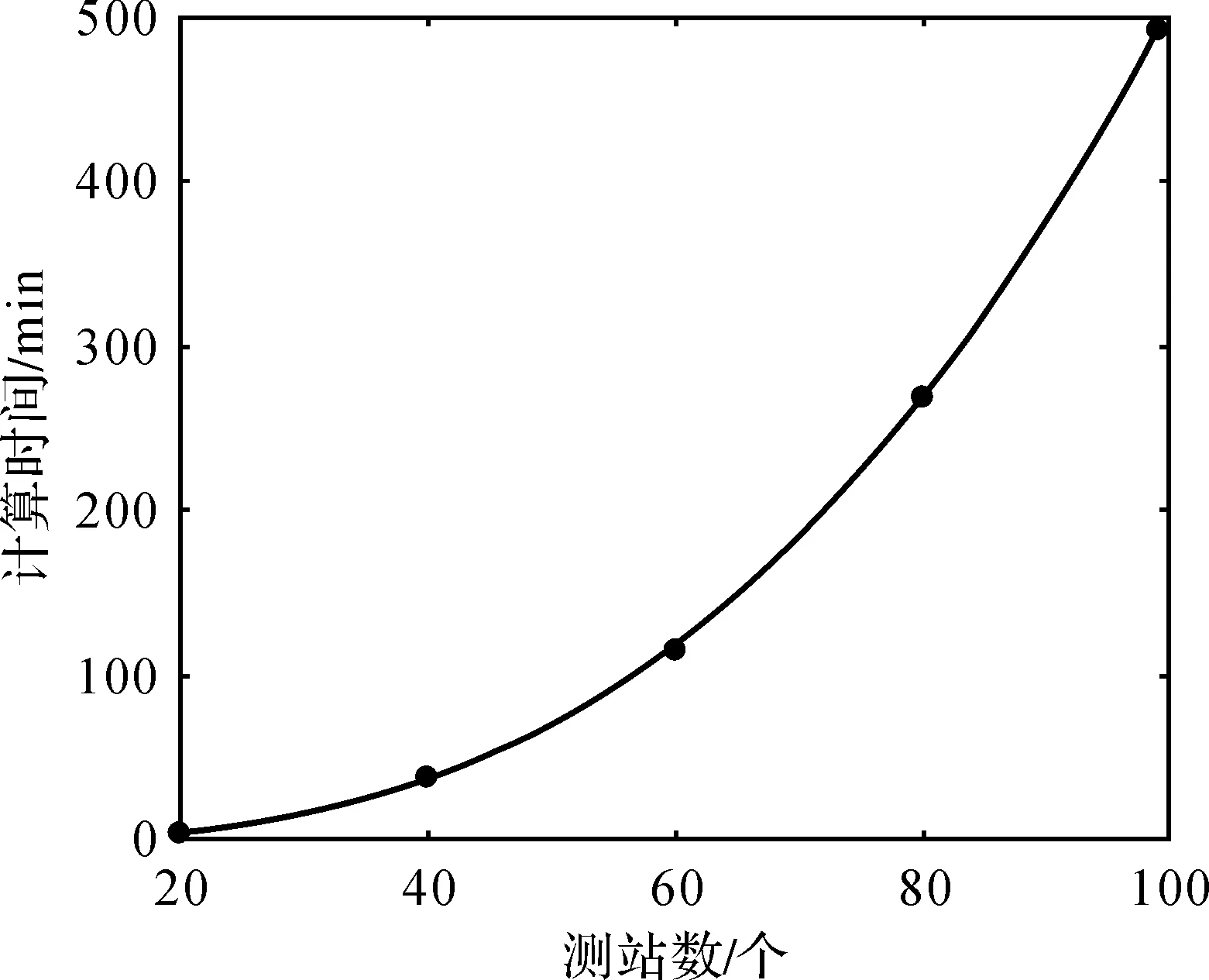
图4 不同GNSS网规模下双差网解计算时间
IGS分析中心通常采用子网划分的策略,以SOPAC为例,其将全球网划分为若干子网,每个子网测站数约为50个左右,子网通过公共站相连接。在子网划分模型中,需要选择3~5个重复站点,这些站点多次参与了计算,子网划分再整体平差的协方差阵与直接整体平差的协方差阵不相同,数学模型的严密性受到了影响,精度也取决于重复站点的数量、分布和观测数据的质量[24]。
GNSS大网解算时的待估参数主要由模糊度参数构成,对于由100个基准站组成的网络,在仅观测GPS卫星的条件下,模糊度参数数量约是其他参数的3倍;随着GNSS卫星数量和频率资源的增加,模糊度参数的数目还会迅速增大。另一个数目较多的待估参数是对流层延迟(zenith total delay,ZTD)参数,ZTD模型采用分段函数,通常每1~2 h估计一个ZTD参数。因此,目前主要通过以下两个途径解决GNSS大网数据解算面临的瓶颈:
(1) 改进模型与算法。无论是模糊度参数还是ZTD参数,它们都是典型的与时间相关的参数,只在特定的时间段有效,分为活跃和不活跃两种状态。若法方程仅考虑活跃参数,则法方程的维度将会大大降低,约为原来的25%左右。基于此,很多学者研究采用参数消除与恢复方法,通过消去法方程中大量失效的模糊度等参数来降低法方程的维度[25-26,3],大大降低了内存消耗和计算时间。此外,基于高精度载波距(carrier range),提出了大规模GNSS网整体快速处理的方法,该方法首先利用约100个测站估计精密轨道和钟差,并计算卫星端的FCB(fractional cycle bias);其次逐站进行非差模糊度固定,将载波相位量扣除固定的非差模糊度,得到高精度的新观测值载波距;最后联合载波距和伪距进行大网严密解算[5]。
(2) 采用并行计算技术。2004年,IGS在总结过去10年成就的基础上,对GNSS数据处理能力及处理规模提出了新的要求。以此为驱动,2006年国际大地测量协会(IAG)的第1工作小组开展了Digger、Dancer和Dart(Dancer Real-Time),旨在利用网格计算和分布式计算技术,高效快速地处理全球范围内的参考框架数据[27];2006年,Schrock展望了分布式技术和CORS的融合,提出了GNSS数据分布式处理策略[28];Enrico等采用分区分布式解算的方法,基于子网划分的方法,高效解算了地中海中部1998—2004年超过80个CORS站的数据[29];2009年,李健等提出了一种面向联合CORS的网格计算理论模型和大规模CORS网的体系结构[30];2010年,基于分布式计算技术,美国提出采用面向服务的体系结构(SOA)实现GPS运行控制系统(GPS-OCX)的现代化[31];2013年,吕志平等提出了大规模GNSS数据分布式处理体系架构[32];2014年,基于云计算技术,陈正生提出了GNSS测量云服务、云GNSS接收机的概念及实现形式[33],刘枫基于MPI+OpenMP混合模型实现了GNSS分布式计算[20];2016年,李林阳等基于Hadoop提出了云GNSS体系结构[34];2016年,王成等利用位置与云计算建立了电离层TEC主动式播发平台[35];借助于Dancer项目前期开展的研究,2016年,IGS成功将协调分析中心生成融合产品的任务部署到亚马逊云平台上[36];2016年,杨元喜提出了综合PNT的概念,并将云端化运控(云平台控制体系)作为其核心关键技术[37]。在软件开发上,2007年,Bernese 5.0版本就支持多核多处理器的并行计算[38],陈正生等对其进行了多节点的分布式改造[39];2013年,吕志平等从底层采用了云存储、分布式、并行化数据处理技术,如TPL、WCF、HDFS、MapReduce等,开发了GNSS分布式处理软件GNSSer,致力于大规模、高精度、自动化、云服务的GNSS数据快速处理和服务[40]。在实际应用中,我国陆态网数据处理[41]和美国CORS数据重处理[42]等都采用了并行计算、云计算技术,高效处理了基准站网的数据。
3 结 语
卫星导航系统和基准站网分别是实现高精度位置服务的重要空间段和地面段基础设施,是一个国家或地区的重要战略资源。本文首先从空间段可用卫星和频率资源的增加、地面段基准站网的建设和升级,以及GNSS数据量的倍增3个方面阐述了大规模GNSS网的发展现状;其次总结了GNSS大网存储与管理的现状,集中式数据管理存在诸多的瓶颈,云存储是一种有效的解决方案;最后归纳了GNSS大网数据解算的研究现状,采用改进的模型与算法和利用并行计算技术是两种切实可行的方法。
随着我国BDS全球覆盖进程的加快推进,以及地基基准站网的加密和升级,大规模GNSS网迎来了新的发展机遇,研究GNSS大网的数据存储、管理、解算和发布将一直是GNSS领域的热点问题。
猜你喜欢
电力建设(2022年10期)2022-09-28
福建文学(2020年3期)2020-08-06
化工设计(2020年6期)2020-01-13
小星星·阅读100分(低年级)(2019年9期)2019-11-28
红蜻蜓·低年级(2019年5期)2019-07-31
中国新通信(2019年21期)2019-03-30
劳动保护(2018年8期)2018-09-12
航天器工程(2018年2期)2018-04-24
读者·校园版(2015年7期)2015-05-14
燃气轮机技术(2014年4期)2014-04-16