
鸽子啄食:形态学控制与工程灵感
2018-11-02 09:51刘艳强延现有张德远
制造业自动化 2018年10期
尚 宇,刘艳强,延现有,张德远
(北京航空航天大学 机械工程及自动化学院,北京 100191)
1 表征现象观察与描述
鸽子的生活习性为群居生活,个体在群体中有一定的生存压力并且个体之间会存在竞争,为了能够获取更多的食物,在成长过程中的长时间锻炼学习以及物种进化的影响,使其能够在不同环境下根据食物的不同位置进行头颈姿态的灵活调整,仅通过快速的“点头”动作就能快速准确地啄食。
研究最初,通过慢镜头记录了鸽子的一个完整啄食过程,可以明显的发现,在啄食时,鸽子的头颈部在向目标食物靠近的过程中,并不是一次到位啄取食物,而是身体通过双腿的运动向目标靠近到一定程度时,头颈部发生一次“暂停”,之后身体静止,并且会伴随着头颈部的角度与方位的调整来向食物靠近,在靠近的过程中间会再进入一次“暂停”状态,接着继续向食物靠近,最后通过一个瞬间地“点头”动作啄取食物。而且,鸽子在啄取后续的食物时,不再移动身体,仅通过头颈的方位调整就可以啄取在其能接触到的范围内的多个食物,即可以“一次定位,多次啄取”。
2 分析与假设
1975年弗莱得曼(Mark B.Friedman)教授通过实验给出结论:鸽子头部的前后摆动行为与保持视野稳定有很大关系,鸽子头部的暂时静止,可以使清晰的视野稳定在视网膜上,头部的前伸,可以在深度上对图像进行感知[1]。根据此实验结论可以认为,鸽子在啄食过程中的头颈运动是在视觉反馈的控制下进行的。鸽子的视锥细胞(视网膜的感光神经元具有辨别颜色的能量)均匀地分布在视网膜的表层,因而鸽子可以看清视野内几乎所有的物体[2]。就横向位置而言,单只鸽眼不移动时,视野范围约160°,由于鸽眼可以转动,每只眼睛可以增加约20°视野,在中间的区域,双眼视野交叠约25°(即双眼能够同时看到这个角度内的物体,称为“双目视野”),此外鸽子头部后方存在一片20°~25°范围的“盲点”不在视野范围内(如图1所示)。鸽子由于双目视野较小,不易于识别图像深度,即立体视觉较弱,因此鸽子需要不断地通过“头部前伸”与“头部暂停”的交替来获取图像上的深度信息,从而实现视觉反馈定位。
2016年,加拿大女王大学(Queens University)的学者Leslie M. Theunissen通过实验发现鸽子啄食时,头颈在进入第二次暂停状态之后,鸽子的眼睛几乎处于闭合状态,此时可以认为视觉不发挥作用或视觉反馈效果已经大大削弱[3]。
根据所观察到的现象以及现有的研究成果,对鸽子单次啄食的动作进行阶段的划分,并提出一种控制假设:鸽子的运动控制模式在不同时期进行切换。头部第一次进入暂停状态之前,身体不断向食物方向靠近,此时运动处于视觉反馈下的半闭环控制,称为粗略定位阶段;第一次暂停,确定要啄食的目标所处的区域位置,之后开始调整头颈部的角度方位再次向食物靠近,此时运动仍处于视觉反馈下的半闭环控制,称为精确定位阶段;第二次暂停后,通过“点头”动作啄取食物,此时的运动控制处于开环控制,称为最终啄食阶段。这一阶段可以认为是其头颈部在长期训练中形成的一种固化,通过生物体本身的感觉估计或惯性来完成对最后动作的配置,可以称之为身体智能(Embodied Intelligence)或形态学控制(Morphology control)。
鸽子进行啄食主要通过头颈骨骼的运动,鸽子的颈椎关节有12节并且关节面呈马鞍形,由于气管、食道等组织没有颈椎关节长,所以鸽子的颈部关节呈S型并且具有高可动性和高柔韧性[4], 可以灵活的接触到一定范围内的多个目标点,因此,鸽子可以高效的进行“一次定位,多次啄食”。
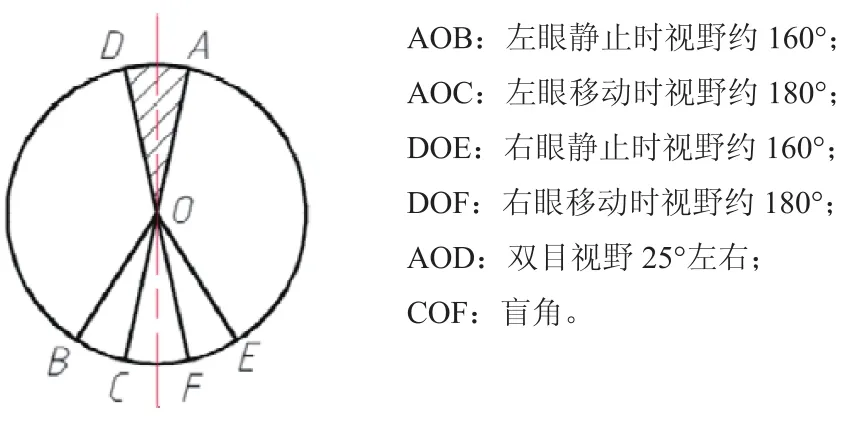
图1 鸽子视野范围
3 控制模型建立与仿真
3.1 运动控制模型建立
鸽子的双腿运动和头颈运动之间是独立发生的,鸽子可以在无视觉变化情况下进行无头颈动作的双腿移动,也可以在双腿静止时单独进行头颈动作[5]。因此,可以认为在鸽子啄食时,控制身体跟进和头颈运动的大脑对身体的运动和头颈定位运动的控制指令是单独发出的。
头颈运动控制与视网膜信息处理、视觉神经通路及脑部活动有关,基于视觉生理学的概念,我们把头颈运动分成两个基本层次:Higher Level和Lower Level——视觉感知层和运动控制层(如图2所示)。
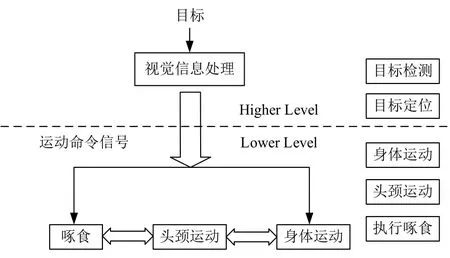
图2 鸽子头颈运动层次划分
上层部分主要是生物视觉图像算法与处理,通过环境建模、目标特征提取、目标检测与定位实现,下层部分主要头颈运动部分,通过视觉的定位与肌肉骨骼的运动实现。
根据提出的控制假设,建立鸽子头颈定位和运动控制模型如图3所示。

图3 视觉定位与运动控制模型
头颈运动模型中的运动控制由两部分组成,分别为视觉反馈的半闭环运动和头颈部的开环运动,两种运动模式由控制器进行切换,最后完成定位。
3.2 控制模型仿真
鸽子啄食是基于形态智能与估计的一种控制方式,依赖于长期进化的结果,误差的随机性使得在控制上有很大的难度。模糊控制完全是根据操作人员的操作经验实现对系统的控制,具有较强的鲁棒性,不依赖于对象的数学模型,并且对被控对象参数的变化不明显。
通过MATLAB设计模糊控制器和仿真模型,本文中选取误差e和误差变化率ec作为模糊控制器的输入变量,模糊化为E和EC,选取u为输出变量,模糊化为U,输入输出的轮域均设计为[-5,5],输入输出模糊子集均取{NB,NM,NS,Z,PS,PM,PB},模糊子集对应的隶属度曲线图如图4所示。
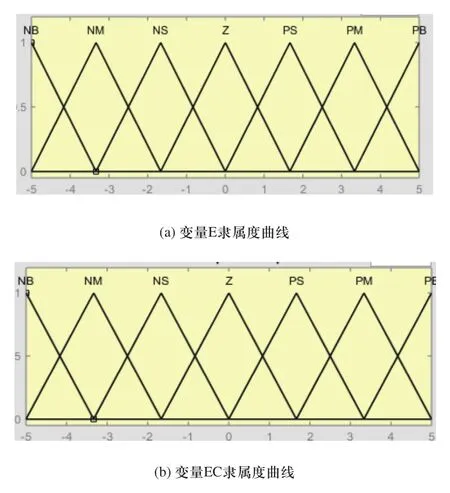
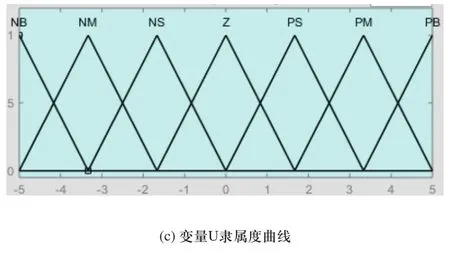
图4 变量E、EC、U的隶属度曲线
根据控制规律,建立49条模糊控制规则如表1所示。
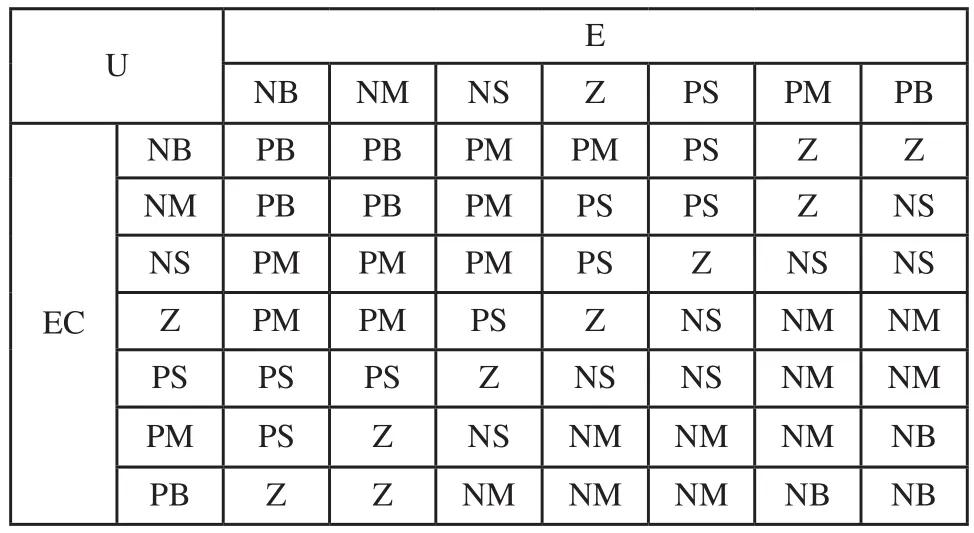
表1 模糊控制规则表
模糊推理采用Mamdani法,解模糊利用重心法centroid。在Simulink中建立定位与运动控制模型并仿真运行。
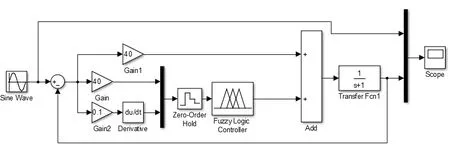
图5 Simulink模糊控制模型
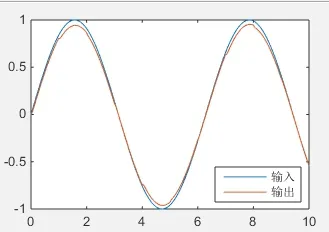
图6 仿真运行结果
通过仿真运行结果,可以发现,当输入为正弦曲线时,输出也为正弦曲线,误差较小且运行平稳,可以验证假设及控制模型的正确性。
4 工程启发与应用
在航空装备领域,用于飞机进气道制孔的爬壁机器人已经广泛地应用于飞机自动化装配技术中。但是由于飞机S型进气道的特殊结构,车轮在与导轨的直接接触时处于纯滚动状态,加上摩擦力的影响等原因,爬壁机器人在沿着导轨移动过程中会出现随机打滑的现象,会带来较大的定位误差,对制孔的效率和制孔的质量带来较大的影响。
借鉴鸽子的视觉反馈定位机制,以及前文提出的控制模式在不同时期进行半闭环与开环不断切换的控制模式,在工程应用中,使用非接触式视觉定位技术,在机器人钻头旁边安装内窥镜,将图像反馈引入运动控制系统当中,实现视觉反馈下的半闭环运动控制;借鉴鸽子的身体智能和形态控制机理对钻头结构进行优化,使用膨胀套筒与柔性气钻进行配合,膨胀套筒由内套和外套组成,并且内套与外套锥面配合,由支撑架带动向钻模板的标记孔运动,进一步保证定位精度,靠柔性机构之间的约束实现开环控制。
制孔机器人在加工过程中的寻孔定位和制孔操作与鸽子啄食时的运动有相似之处,包括车轮在内的机器人主体相当于鸽子身体,用于识别标记孔的内窥镜相当于鸽子的眼睛,制孔操作相当于鸽子的啄食动作。
爬壁制孔机器人的结构简图如图7所示。

图7 爬壁制孔机器人结构简图
建立爬壁制孔机器人的运动模型如图8所示。

图8 爬壁制孔机器人的运动模型
在钻头进行姿态调整的过程中,内窥镜对目标点的位置图像进行采集和特征提取,将误差值作为反馈量用于定位补偿,直至加工钻头在目标点位置处于一种正确的姿态,此时的控制过程为视觉反馈下的半闭环控制;定位完成之后,柔性加工钻头通过与膨胀套筒之间的约束,进行后续的制孔加工,此时的控制过程为开环控制,通过控制模式的不断切换,能够提高定位精度和制孔效率。
5 结束语
对鸽子啄食时头颈运动及鸽眼视野进行分析,可以发现在运动控制中视觉反馈发挥着关键作用,视觉的反馈有助于鸽子啄食时的姿态调整以及准确地啄取食物。根据自动控制原理,对鸽子啄食运动进行分析,可以建立其啄食过程的视觉定位与运动控制模型,将视觉反馈的运动控制模型应用到爬壁制孔机器人中,使用半闭环与开环方式不断切换的控制方式,提高定位精度和效率,提出了一种由自然生物表征到工程实际的仿生控制应用方案。
猜你喜欢
今日中国·西班牙文版(2022年5期)2022-06-06
装备制造技术(2020年2期)2020-12-14
装备制造技术(2020年2期)2020-12-14
人人健康(2020年8期)2020-09-02
科学导报(2019年7期)2019-09-23
制造技术与机床(2019年9期)2019-09-10
小品文选刊(2019年3期)2019-03-20
创新作文(1-2年级)(2017年10期)2018-04-16
制造技术与机床(2017年3期)2017-06-23
肿瘤预防与治疗(2015年6期)2015-09-26
