电动机中反电动势模型的建立与释疑*
2018-11-06 12:54吴广国
物理通报 2018年11期
吴广国
(北京景山学校 北京 100006)
张思宇
(北京市东城区教师研修中心 北京 100009)
黄琭琰 邹斌
(中央民族大学理学院 北京 100081)
1 问题来源
人教版普通高中《物理·选修3-2》的“法拉第电磁感应定律”一节中讲到反电动势.教材中给出如图1所示的直流电动机,并提出了这样的问题:处于磁场中的线圈转动,会使得线圈中产生感应电动势.那么,线圈中的感应电动势对电源产生的电流是起了加强作用还是减弱作用呢?是推动还是阻碍线圈的转动呢?[1]

图1 直流电动机的模型和侧面图[2]
由图1可知,直流电动机工作时,当线圈处于图中位置处,ab与cd均切割磁感线,根据右手定则,该两部分动生电动势串联在电路中,与原回路中电源相反,使得原电源产生的电流减小,并阻碍了线圈的转动.
电动机工作时,线圈中也会产生感应电动势,线圈产生的感应电动势对电源电动势总是起反作用,因此通常把这个电动势称为反电动势.它的作用是阻碍线圈的转动.如果电动机工作中发生突发情况使得机械阻力过大,导致电动机停止转动,这时反电动势为零,线圈就等于直接短接在电源两端;而一般线圈电阻都很小,这时通过其的电流很大,长时间的大电流很容易把线圈烧毁.因此,当发现电动机由于机械故障停转时,应立刻切断电源,维修检查.
如图2通过实验研究直流电动机转动过程中,回路中电流随时间变化情况.电流的测量用Vernier电流传感器,每秒钟测样200次,通过I-t图像可以看出,当闭合开关电动机开始转动时,电流较大等于0.37 A,随着电动机转速越来越高,反向电动势越来越大,从而消弱了电源产生的电流.在该实验中,电动机处于空载状态,电动机转速较高,从而产生较大的反向电动势,电动机稳定转动后,回路中的实际电流很小等于0.024 A.在5 s时刻后用手去摩擦电动机阻碍电动机的转动,直到电动机停止转动,实验图像和数据表明,当降低转速时,反向电动势减小,回路中电流增大,当电动机停止转动时,回路中电流约等于0.404 A.

图2 利用传感器观察电动机启动过程中电流的变化情况
2 电动机中反电动势模型
在直流电动机中,无论是图1电动机中线圈的切割磁感线产生的反电动势,还是如图3所示运动的导体棒切割磁感线产生的反电动势原理都是相同的.如图3所示,足够长的平行光滑导轨PQ,MN相距l,处在同一水平面中,磁感应强度B的匀强磁场竖直向下穿过导轨面.横跨在导轨上的金属棒ab静止,质量为m,电阻为R,导轨电阻不计.导轨间通过开关S将电动势为E,内电阻r的电池接在M,P两端,试分析开关S刚闭合的瞬间和后续过程中,金属棒ab的加速度、速度如何变化?导体棒中的电流如何变化?

图3 导体棒ab运动切割磁感线产生反电动势
开关S闭合瞬间,导体棒的速度为零
BIl=ma
求得此时加速度为最大值
(1)
设后续任意时刻t,导体棒ab的速度为v(t),则ab棒切割磁感线产生反电动势,电路图变为图4所示.

图4 ab棒充当反电动势
E-Blv(t)=I(t)(R+r)
(2)
(3)
安培力使导体棒产生的加速度可由牛顿第二定律得
(4)
所以
(5)
解该微分方程,得
(6)
(7)
(8)
通过以上v(t)、a(t)、I(t) 3个物理量的表达式,可以定性地画出v(t)、a(t)、I(t)函数图像如图5所示.

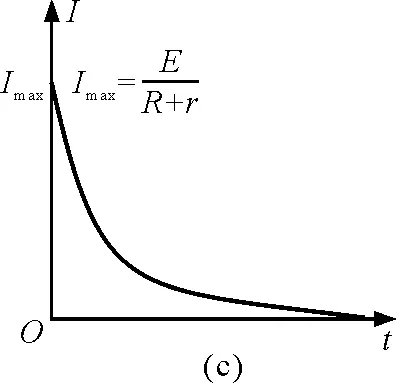
图5 导体棒v-t,a-t和I-t图像

3 从微观角度理解电动机的工作原理
2017年高考北京物理卷中第24题考查了电动机的问题,如图6所示,ab棒充当电动机中导体棒,导体棒ab最后通过定滑轮拉动重物匀速直线运动.轨道端点MP间接有直流电源,导体棒ab通过滑轮匀速提升重物,电路中的电流为I.
(1)求在Δt时间内,图6“电动机”输出的机械能;
(2)从微观角度看,导体棒ab中的自由电荷所受洛伦兹力在上述能量转化中起着重要作用.为了方便,可认为导体棒中的自由电荷为正电荷.
我们知道,洛伦兹力对运动电荷不做功.那么,导体棒ab中的自由电荷所受洛伦兹力是如何在能量转化过程中起到作用的呢?请以图6“电动机”为例,通过计算分析说明.

图6 2017年高考北京第24题“电动机”模型
解析:
(1)“电动机”输出的机械能转化为重物重力势能的增加
ΔEp=mgvΔt
mg=BIl
所以 ΔEp=BIlvΔt
(9)
拓展:其实该“电动机”的输出功率P出=Iε反,对整个回路,由闭合电路欧姆定律有
(E-ε反)=I(R+r)
等式两边同时乘以电流I,得
I(E-ε反)=I2(R+r)
移项得IE=I2(R+r)+Iε反
(10)
由能量守恒定律可知,电源E消耗的电功率,一部分为电路中ab棒电阻R与电源内阻r产生焦耳热功率,其他为提升重物的机械输出功率,即P出=Iε反.
(2)如图7所示为电动机中导体棒ab中载流子所受洛伦兹力的情况.设导体棒横截面积为S,单位体积内自由电荷的数目为n,自由电荷电荷量为q,自由电荷沿杆方向速率为vy,则
垂直于导体棒方向(x方向)洛伦兹力分力为
Fx=Bqvy
沿导体棒方向(y方向)洛伦兹力分力为
Fy=Bqv
因此,得到洛伦兹力x,y方向的分力所做功
Wx=nSlFxvΔt=
nqSvyBlvΔt=BIlvΔt
(11)
Wy=-nSlFyvyΔt=
-nqSvyBlvΔt=-BIlvΔt
(12)
综上,洛伦兹力不做功,但沿导体棒方向的洛伦兹力分力Fy做负功,阻碍自由电荷运动,消耗电能;垂直导体棒方向洛伦兹力分力Fx做正功,推动导体棒运动,使得机械能增加.从微观上说,虽然洛伦兹力对运动电荷不做功,但在宏观上看,运动的自由电荷借助于洛伦兹力将电能转化为机械能[4].

图7 电动机导体棒ab中载流子所受洛伦兹力情况
疑惑1:为何“沿杆方向洛伦兹力分力Fy做负功是在消耗电能”?
从功能关系角度来看,“垂直导体棒方向洛伦兹力分力Fx做正功,推动导体棒运动,使杆的机械能增加”,这个结论很好理解,因为根据动能定理:合外力对物体做正功,其作用是使质点的动能增加,因此判断出Fx的功为正值,即可知其作用是使电荷的动能增加.但是“沿导体棒方向的洛伦兹力分力Fy做负功,阻碍自由电荷运动,消耗电能”,这个结论就不容易找到依据了.如果根据动能定理,通过Fy对电荷做负功,只能得出使电荷的动能减少的结论;如果从“静电力和非静电力做功”的角度来看,电荷在电路中的电池(E,r)提供的静电力作用下沿杆从a向b运动,若将洛伦兹力分力Fy视为“非静电力”,此“非静电力”正在克服静电力做功,而克服静电力做功的结果应该是使电势能增加.到底如何解释Fy做负功所起的作用呢?可以结合图4所示的宏观模型来解释Fy的作用:确实可以将Fy视为“非静电力”,但它是电路中另一个电源,即图4中由于切割磁感线产生反电动势的ab棒这个电源的“非静电力”,它的作用是克服静电力做功使ab棒这个电源的电势能增加,而非使电路中电池的电势能增加[5].从整个电路的角度来看,正是由于这个反电动势的存在,使图4中由电池所提供的电能没有全部转化为内能(与没有反电动势时相比),而是通过Fy做功产生反电动势使电流减小的途径将本来也会变为内能的一部分电能“接住”,再通过Fx做正功转化为机械能.这就从微观解释了是通过反电动势完成了电能到机械能的转化.
疑惑2:所有载流子在x方向上的洛伦兹力的合力∑Fxi,宏观上表现为导体棒受到的安培力,洛伦兹力是作用在导体棒中的载流子,如何就体现为作用在导体棒的安培力呢?
拓展释疑:以静止的载流导体为例,如图8所示.

图8 静止载流导体霍尔效应图
如图8所示为一载流导体,载流导体置于匀强磁场B中,载流导体中所有定向运动的电子都受到洛伦兹力f洛作用,f洛=-ev×B,沿z方向.这导致导体的上表面出现负电荷堆积,而在下表面出现正电荷的堆积,结果与霍尔效应一样,载流导体产生了沿+z方向的电势差.一段时间后,电场力与洛伦兹力平衡,此时电子运动情况与外磁场B不存在时相同(沿-x方向运动);不同在于载流导体内部出现了横向电场[6].而对定向移动的电子进行受力分析可知,电场力和洛伦兹力受力平衡。由稳恒的电场力必须遵从牛顿第三定律可知,电子将给载流导体上下表面上聚集的电荷施加沿+z轴的反作用力,这个反作用力与外磁场对运动电子施加的沿+z轴的洛伦兹力等大反向.综上,外磁场作用在运动电子上的洛伦兹力虽不做功,但能通过横向电场的中间作用,表现为外磁场推动载流导体的安培力做功[7].因此,安培力是洛伦兹力的宏观表现.
猜你喜欢
微电机(2022年8期)2022-10-12
北京航空航天大学学报(2022年6期)2022-07-02
理科爱好者(教育教学版)(2022年2期)2022-05-05
郑州大学学报(工学版)(2020年2期)2020-06-16
物理通报(2019年10期)2019-10-18
中学生数理化(高中版.高考理化)(2019年3期)2019-04-25
汽车电器(2019年2期)2019-03-22
新课程·下旬(2018年4期)2018-07-24
科教导刊·电子版(2017年16期)2017-07-21
火花(2015年7期)2015-02-27