
本艇机动对鱼雷武器系统攻击效能的影响分析
2018-11-08 01:01王凯帅刘冠杉
数字海洋与水下攻防 2018年2期
王凯帅,孙 健,刘冠杉
(中国船舶工业系统工程研究院水下系统研究所,北京100094)
0 引言
随着线导鱼雷、声呐和指挥控制技术的发展,使得搭载线导鱼雷和声呐的潜艇有可能在较远距离上先敌发现、先敌攻击。而线导鱼雷发射后的本艇机动问题一直是上述领域的重点问题,线导鱼雷发射后,本艇采用合适的机动方式,可以极大地增加导引过程中本艇对目标的有效探测时间,进而提高鱼雷的导引效果。
潜艇典型鱼雷攻击过程一般经过情报处理判断、目标运动分析、鱼雷攻击导引和攻击效果评估4个阶段,情报处理判断是指潜艇开始接敌时,利用集合论方法对不同传感器的探测信息进行是否同一归类,通过前期的情报信息确认目标是否为需要攻击的目标。目标运动分析一般在声呐可以稳定跟踪目标后进行,利用声呐方位序列的处理方位确定目标的初距、航向和航速信息。鱼雷攻击导引一般在目标运动分析得到较为准确的结果后进行,主要指鱼雷的射前检查、射击诸元计算和发射后鱼雷的线导导引。在鱼雷攻击导引完成后,潜艇需要根据鱼雷战斗部状态和目标噪音确认目标的近似毁伤程度,对本次攻击效果进行评估[1]。
为了达到先敌发现、先敌攻击的目的,潜艇武器系统一般采用现在方位导引法进行鱼雷导引,该导引方法不依赖目标的运动要素(目标速度、距离、航向),仅获得目标方位即可导引鱼雷。但是该方法的不足在于,鱼雷出管航行过程中,鱼雷航行噪音易对本艇探测的目标噪音进行干扰,导致潜艇武器系统无法获得目标方位,进而采用前期目标运动分析推算的方位进行现在方位导引,导致鱼雷攻击效能下降[2]。
本文建立潜艇声呐系统双目标分辨模型、武器系统目标运动分析和鱼雷攻击导引模型,分析潜艇发射后的机动对潜艇武器系统攻击效能的影响。
1 声呐双目标分辨模型
实际鱼雷使用过程中,在采用现在方位导引法导引鱼雷攻击目标的过程中,由于鱼雷航行噪音对目标噪音的遮盖效应,使得艇上声呐系统不能在每个鱼雷导引周期都能获得目标的真实方位,而只能采用目标运动分析的推算方位,且声呐系统探测目标方位存在固定误差和随机误差,因此需要对声呐探测目标的模型进行建模,本文采用了下述模型。
1.1 声呐双目标分辨模型
1.1.1 遮盖条件
在下述条件下鱼雷噪音遮盖目标噪音,声呐系统无法探测目标真方位,声呐只能跟踪鱼雷噪音。
式中:SLt为鱼雷在潜艇声呐基阵处的某频点上的噪声级;SLm为目标在潜艇声呐基阵处的某频点上的噪声级;a为可分辨的噪声级差,dB;Δθm_T为目标鱼雷的相对方位差;θ′为潜艇声呐系统的分辨角,该参数一般是ΔSLt_m、目标和鱼雷相对本艇角速度的函数,在导引过程中是变化的。
1.1.2 分辨条件
满足下述条件时,声呐能对攻击目标进行跟踪。

1.2 目标和鱼雷辐射噪声模型
目标声源级采用如下经验公式:

目标噪声级采用如下公式计算:

式中:Vm为舰船航速,kn;T为舰船的排水量,t;f为噪声频率,kHz。
鱼雷噪声级采用如下公式计算:

式中SLt0为鱼雷的声源级,根据鱼雷性能确定。
1.3 传播模型
采用如下经验公式:

式中:TL为传播损失,dB;r为传播距离,m;β为对数声吸收系数6 dB/km。
2 目标运动分析算法
在实际攻击过程中,艇上武器系统在鱼雷噪音遮盖目标时,可根据前期声呐稳定跟踪目标的方位序列(含有测量噪声)进行目标运动分析,获得目标运动的速度、航向和距离,推算的目标方位导引鱼雷。
潜艇目标运动分析的主要方法是极大似然估计算法,对本艇若干次机动(一般经历方位航向航路、扩大或减小方位变化航路和占位攻击航路3个阶段)以后的声呐方位序列采用极大似然估计法估计目标的运动要素,当仅具有目标方位Bm的观测时,观测系统需要估计的状态向量为

式中:x(t0)和y(t0)分别为开始目标运动分析时刻t0时的目标东向位置和北向位置;Vmx和Vmy分别为目标速度的东向分量和北向分量。
系统的观测方程为

式中:Bm(ti)为开始目标运动分析后,某采样周期点ti时刻的目标测量方位;nβ(ti)为目标方位测量噪声。
系统雅各比矩阵为

利用如下迭代方程可求得目标极大似然估计解:

式中:Zm=[Zm(t0),Zm(t1),…,Zm(ti)]为测量方位序列;为第l次迭代状态向量的估计值;+1为第l+1次迭代状态向量的估计值;为根据生成的估计方位序列;ul为迭代步长;W为权值矩阵,在不明确方位测量方差规律时可以取为单位矩阵[3-4]。
3 潜艇鱼雷攻击过程建模
以潜艇发射尾流自导鱼雷攻击敌方水面舰艇为背景进行数学建模。
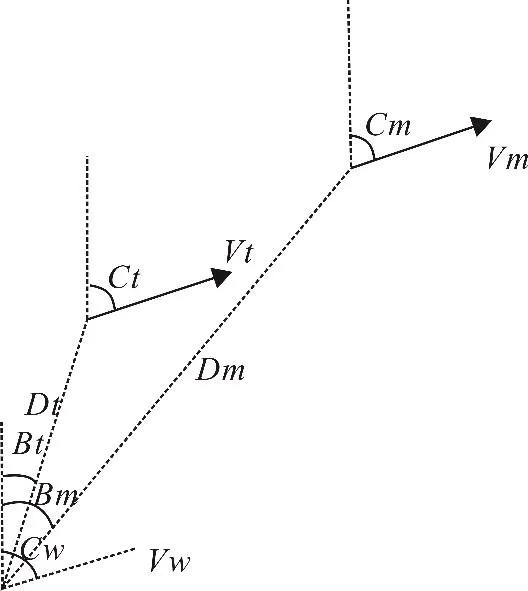
图1 潜艇鱼雷攻击建模Fig.1 Modeling of torpedo attack by submarine
如图1所示:Cw、Cm、Ct分别为潜艇、目标和鱼雷的航向角;Vw、Vm、Vt分别为潜艇、目标和鱼雷的速度;Dm、Dt分别为目标和鱼雷距离本艇的距离;Bm、Bt分别为目标和鱼雷相对本艇的方位。
潜艇武器系统在导引鱼雷过程中可以通过本艇导航系统获得本艇的航向角Cw、速度Vw;可以通过雷上线导系统获得鱼雷的航向角Ct、速度Vt和鱼雷相对发射点的位置信息,通过计算可以得到鱼雷距离Dt、鱼雷方位Bt;可以通过声呐系统获得目标方位Bm,目标距离Dm可以通过噪声强度进行粗略估计,目标航速Vm和航向Cm在快速攻击过程中一般为未知的[5]。
由于目标航速Vm和航向Cm未知,因此采用现在方位导引法进行鱼雷导引。
潜艇武器系统采用现在方位导引方法进行鱼雷导引,该方法按照公式(9)生成鱼雷的航向角指令:
式中:η为鱼雷相对于目标的方位差;Δt为艇上武器系统的导引周期;St为鱼雷在一个导引周期内航行的距离;Rc为尾流瞄准点,代表鱼雷穿越目标尾流航迹线时,期望的雷目距离[6]。
按照公式(10)计算鱼雷是否开机,目标距离Dm可以在鱼雷发射前进行粗略估计或采用目标运动分析得到的目标距离:

式中:Topen为自导开机的剩余时间;T为潜艇武器系统导引鱼雷的时间;Vm′为由于目标运动分析后
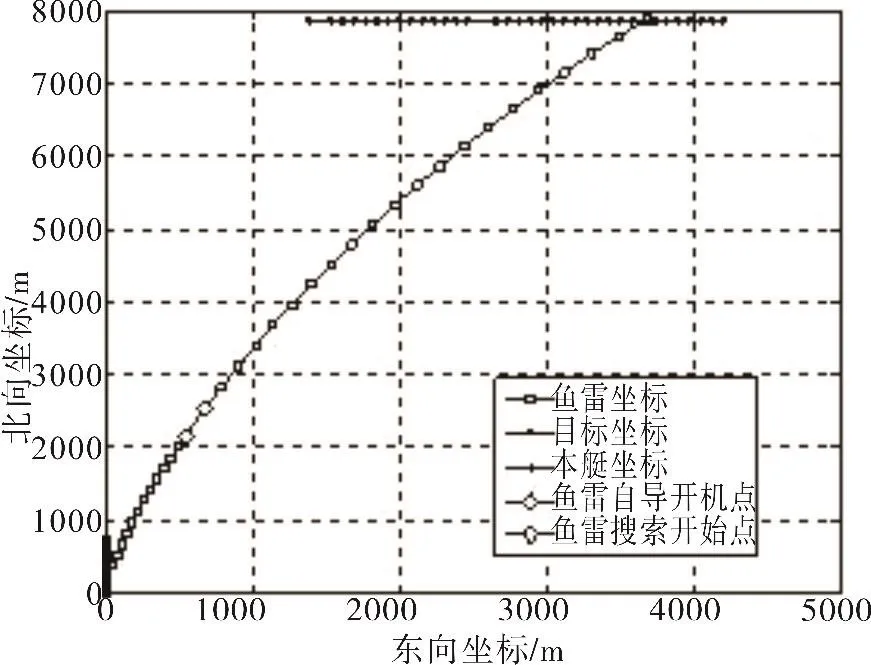
图2 现在方位导引鱼雷弹道图Fig.2 Trajectory diagram of torpedo guided by present bearing
的目标估计速度;k为系数,防止鱼雷开机过晚导致错过目标尾流,本文取0.7[7]。
按照现在方位导引法进行鱼雷导引的效果图如图2。潜艇发射鱼雷攻击舷角100°,距离8 km,航速15 kn的目标,仿真中假设潜艇声呐系统可以在每个鱼雷导引周期实时的获得目标的真方位,鱼雷导引头开机前鱼雷航速为30 kn,鱼雷导引头开机后鱼雷航速为60 kn。
4 仿真分析
按照上述数学模型对鱼雷攻击过程进行仿真,声呐系统按照声呐双目标分辨模型探测目标方位,声呐测量噪声均值为0,方差为0.4,如果目标噪音被鱼雷航行噪音干扰达不到目标的检测条件,则采用目标运动分析推算的目标方位用于鱼雷导引,所产生的推算误差考虑到鱼雷攻击过程中。
对声呐探测噪声级差、声呐分辨角和本艇机动对鱼雷攻击效果的影响进行仿真分析(假设本艇机动噪声对声呐系统无影响)。
潜艇发射鱼雷攻击舷角100°,距离8 km,航速15 kn的目标,其中声呐系统可分辨的噪声级差a为12 dB,声呐系统分辨角θ′为5°,鱼雷导引头开机前鱼雷航速为30 kn,鱼雷导引头开机后鱼雷航速为60 kn。鱼雷发射后,本艇以航向0和60°,速度4 kn航行,鱼雷导引效果图如图3、图4所示。
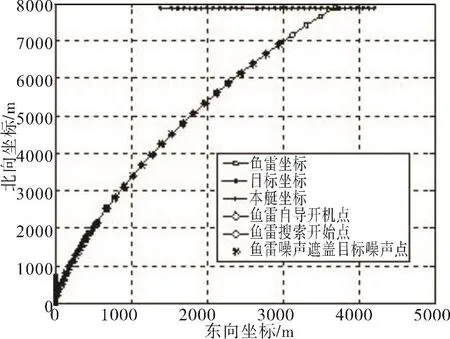
图3 考虑声呐分辨模型的鱼雷导引弹道图(Cw=0°,Vw=4 kn)Fig.3 Trajectory diagram of torpedo guidance considering sonar resolution model(Cw=0°,Vw=4 kn)

图4 考虑声呐分辨模型的鱼雷导引弹道图(Cw=60°,Vw=4 kn)Fig.4 Trajectory diagram of torpedo guidance considering sonar resolution mode(Cw=60°,Vw=4 kn)
对比图3、图4可以得出以下结论:
1)鱼雷出管的导引初期(50 s之前),鱼雷和目标的方位差和噪声级差均无法满足分辨条件,导致声呐无法测量目标方位,而只能使用推算结果进行鱼雷导引。
2)鱼雷导引中期(自导开机前),鱼雷和目标的方位差和噪声级差是否满足分辨条件,和本艇的机动存在关系,如果本艇进行扩大鱼雷和目标方位差的运动,则有利于声呐测量目标方位,此时的噪声级差受本艇的机动影响不大。
3)鱼雷导引末期(自导开机后),此时鱼雷由于转高速航行,此时鱼雷的噪声级会有大幅度升高,在这个阶段的前期,鱼雷噪声级的提高和方位差减小均是影响声呐对目标跟踪的因素;在这个阶段的后期,鱼雷噪声会大幅度衰减,满足声呐分辨的噪声级差条件,声呐可以对目标进行有效跟踪。
4)不考虑本艇航行噪音和声呐系统探测舷角的因素,鱼雷出管后,本艇沿着超前鱼雷方位和目标方位运动,有利于在鱼雷导引过程中潜艇声呐系统探测目标,进而提高鱼雷的导引效果。
5 武器系统设计方案
实际潜艇武器系统设计时,可以在鱼雷发射前采用数学仿真的方法对声呐遮盖点进行图形化显示,如图3和图4所示,辅助潜艇指挥人员进行评估与决策,导引过程中声呐有效的导引点越多,越有利于线导鱼雷方位导引武器系统时获得最新的声呐实测方位,形成新的方位序列,进而提高了线导鱼雷的导引效果。
武器系统还可以进一步在鱼雷武器系统中增加弹道分析评估软件模块(见表1),发射敌舷角为100°,尾流有效长度为300~1 390 m,表中数值为仿真10 000次的鱼雷发现概率,利用蒙特卡罗方法进行效果评估,遮盖点较少的本艇机动方案优于遮盖点较多的本艇机动方案,利用蒙特卡罗方法对指标进行量化后,可以辅助潜艇指挥员进行鱼雷出管后的潜艇机动[8]。

表1 导引效果评估表Table 1 Evaluation list of guidance efficiency
6 结束语
本文基于潜艇声呐系统被动探测目标,发射线导鱼雷攻击水面舰艇的作战背景,研究了典型态势下鱼雷发射后本艇战术机动对线导鱼雷攻击效能的影响。根据鱼雷作战效能蒙特卡罗仿真方法,给出了鱼雷发射后的本艇战术机动最优方案。
武器系统可以在鱼雷发射前设计仿真分析的环节,按照声呐最小遮盖原则,对鱼雷发射后的本艇机动给出辅助决策,辅助潜艇指挥人员进行鱼雷出管后的潜艇机动。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
小哥白尼(军事科学)(2021年8期)2021-11-22
幼儿园(2021年12期)2021-11-06
数字海洋与水下攻防(2020年5期)2021-01-04
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
舰船电子对抗(2019年2期)2019-05-23
海军航空大学学报(2019年1期)2019-04-29
小学生时代·大嘴英语(2015年7期)2015-11-23
