
有人/无人机协同护航反潜研究
2018-11-08 01:01董文洪
数字海洋与水下攻防 2018年2期
徐 梁,董文洪,吴 铭
(海军航空大学航空作战勤务学院,山东烟台264000)
0 引言
潜艇具有隐蔽性强、续航时间长、探测距离远等作战优势,可实现对目标的隐蔽侦查、跟踪和火力打击,是舰船编队面临的主要威胁[1]。因反潜巡逻机具有搜索速度快、搜索效率高等优势,一直以来都是编队实施远程反潜的主要兵力。但反潜巡逻机续航时间短、作战半径小、缺乏自卫能力等缺点,又增加了反潜难度,限制了其使用范围[2]。而无人机则具有续航时间长、机动灵活、作战半径大和不考虑伤亡等优势,与反潜巡逻机协同混编作战,可实现两者的优势互补,提升航空反潜战术运用的灵活性。目前关于有人机和无人机协同作战的理论多集中于协同侦查监视、协同火力打击,以及协同指控技术等方面[3],为适应未来海上反潜作战需求,结合海军岸基、舰载、空载无人机装备发展现状和趋势,研究反潜巡逻机和无人机协同反潜作战具有较强的前瞻性和实际应用价值。
1 反潜巡逻机和无人机协同反潜作战过程分析
为了确定舰船编队中反潜巡逻机和无人机的配置方法,首先应分析反潜巡逻机和无人机协同护航反潜过程。根据反潜巡逻机和无人机的战技术性能和反潜特性,借鉴外军反潜巡逻机运用情况,反潜巡逻机一般在编队外围实施先期反潜,无人机则在反潜巡逻机的指挥通信范围内遂行更远距离的侦查监视任务,形成远程反潜网络,并在敌潜艇到达反舰导弹攻击阵地之前发现并将其消灭。无人机一旦发现敌潜艇活动迹象,实时地向反潜巡逻机传送目标位置信息。反潜巡逻机则根据无人机提供的信息进行准确跟踪、识别、定位,并完成最后的攻击。由于无人机载重小,可以携带的任务载荷种类相对较少,必须合理规划无人机的搭载方案,以提高发现潜艇的概率。例如雷达+电子/红外探测设备,主要对露出水面或进行通信的潜艇进行探测;雷达+小型磁探仪主要对水下或半潜的潜艇进行探测。反潜巡逻机则主要携带鱼雷等攻潜武器对目标进行最后的攻击,可携带少量的主动声呐浮标进行攻击前的最后定位。
2 协同配置原则
通过对反潜巡逻机和无人机协同护航反潜过程的分析得知,在编队航渡过程中反潜巡逻机和无人机的阵位配置取决于所承担的任务。根据编队护航反潜的需求,以及反潜巡逻机和无人机的战技术性能,两者在协同护航反潜过程中必须满足以下原则:1)配置于编队受威胁的主要方向。在外层反潜体系中,反潜巡逻机和无人机配置的主要威胁方向,应是敌潜艇能够快速占据导弹攻击阵位,并能保证在导弹攻击完毕后迅速撤离,即敌潜艇使用反舰导弹有利于攻击扇面内[4]。如果无人机数量充足,也可围绕编队成环形配置。当受敌机威胁较大时,反潜巡逻机还应受到我歼击航空兵的掩护。具体如图1所示。2)反潜巡逻机的前出距离需要综合考虑续航时间、任务持续时间和敌情威胁等,在满足编队所需的反潜纵深条件下,应保证反潜巡逻机在空中有较长的巡逻时间。3)无人机应在反潜巡逻机监控范围内,能够与反潜巡逻机之间建立稳定的通信联系,并能实时传送数据。4)反潜巡逻机和无人机阵位设置应便于编队指挥所的控制。当无人机前出距离较大时,通过反潜巡逻机上完善的指挥通信系统实现对无人机进行远程控制。
图1 反潜巡逻和无人机护航反潜掩护示意图Fig.1 Antisubmarine cover schematic diagram of antisubmarine patrol aircraft and UAVs
3 反潜巡逻机和无人机前出距离确定
3.1 反潜巡逻机和无人机远界确定
根据配置原则2)和3)可得:

式中:Dparo_fore为反潜巡逻机的前出距离;DUav_fore为无人机的前出距离;Sparo为反潜巡逻机前出基准点的最大距离;Dlis为反潜巡逻机有效监听无人机的距离;tlife为反潜巡逻机的续航时间;tstor为反潜巡逻机巡航储备时间;tparo为反潜巡逻机的巡逻时间。
又根据1)可知,反潜巡逻机的活动空域需得到歼击航空兵或舰载机的空中掩护,情况如图2所示。当空中预警机发现敌机在E点,此时反潜巡逻机在A点,歼击机在B点。预警机经过识别确认后,向编队发出警报时间是t1。指挥所引导歼击机拦截敌机,占领攻击阵位C,持续时间为t2。在空空弹最大射程发射,在D点与敌机相遇。此时应保证AD之间的距离大于敌空空导弹最大射程,即在敌机使用武器之前,我方歼击机至少完成了一次攻击。

图2 歼击机空中掩护过程图Fig.2 Air cover process diagram of fighter
由此可得
式中:DAE是预警机为反潜巡逻机提供的预警距离;DBC为歼击机前出迎敌的距离;Dfor为反潜巡逻机与拦截歼击机之间的距离,数值为正表示歼击机在反潜巡逻机阵位前,数值为负表示歼击机阵位在反潜巡逻机之后;Dm_misle为我空空导弹最大有效射程;Vm_misle为我空空弹飞行速度;Vmair为我歼击机速度;De_misle为敌空空弹最大有效射程;Veair为敌机的飞行速度。可以看出若有歼击机掩护条件下,反潜巡逻机的前出距离就可以由歼击机的前出距离,以及反潜巡逻机和歼击机阵位之间的距离来确定。
3.2 反潜巡逻机和无人机近界确定
图3 反潜巡逻机和无人机纵深示意图Fig.3 Depth schematic diagram of antisubmarine patrol aircrafts and UAVs
舰船编队防潜纵深是指在敌潜艇占领导弹发射阵位之前,能够及时发现、识别并实施攻击,无人机最迟发现潜艇的界线到编队基准点的距离[5]。反潜巡逻机和无人机协同护航反潜作战的过程,如图3所示。
由图3可知,编队所需的最小防潜纵深为
式中:DAnti_misle为敌潜艇反舰导弹有效射程;Δω为无人机发现敌潜艇时可能存在的艇位误差;DUav_tec为无人机有效发现敌潜艇的距离。

式中:Dsail为舰船编队在反舰导弹飞行过程中运动的距离;Vsail为舰船编队的航行速度;VAnti_misle为敌潜艇反舰导弹的速度。

式中:Dact表示从无人机发现敌潜艇到反潜巡逻机完成攻击的总时间内敌潜艇相对舰船编队的航行距离;Ven_sped表示敌潜艇的速度。

式中:t1为无人机发现潜艇向指挥所和反潜巡逻机传递信息持续时间;t2为指挥员迅速决断,确定作战方案,给反潜巡逻机下达作战攻击命令时间;t3为反潜巡逻机在无人机的引导下,迅速飞往发现目标区域,完成搜索、跟踪、定位和攻击整个过程的持续时间。
舰船编队在航渡的过程中,反潜巡逻机和无人机协同为编队提供的反潜纵深必须大于Dwarn,此时无人机至少前出的距离为Dwarn-DUav_tec,反潜巡逻机至少前出的距离为Dwarn-Dlis-DUav_tec,这既增加了反潜巡逻机的留空时间,也能通过无人机的前出增大防潜纵深。
4 反潜巡逻机和无人机巡逻线配置
护航反潜过程中反潜巡逻机和无人机不可能保持在某一个阵位,而是在一定空域或巡逻线上往返飞行[6]。而在编队航行过程中,反潜巡逻机和无人机参考的基准点是不断变化的,因而两者的巡逻空域或巡逻线应随着编队有规律地前移[7]。而在实际的运用中,反潜巡逻机通常在编队前方按照巡逻线飞行,以尽可能遮拦敌潜艇主要威胁扇面[8],这符合原则1)配置要求。文章以此讨论反潜巡逻机和无人机的配置。
如图4所示,直线MN为反潜巡逻机的巡逻线,垂直于威胁轴,其中两个圆分别是反潜巡逻机分别在2个端点能够有效监听无人机的距离范围。
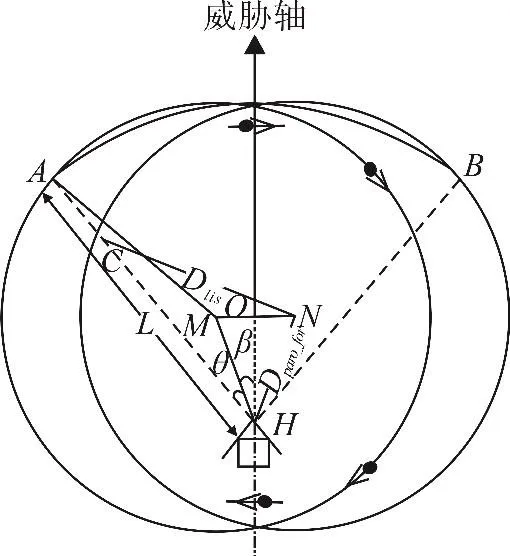
图4 反潜巡逻机和无人机配置示意图Fig.4 Configuration schematic diagram of antisubmarine patrol aircrafts and UAVs
反潜巡逻机和无人机可以为舰船编队提供的最大防潜纵深Dmax为

式中:DMN为反潜巡逻机巡逻线MN的长度。
反潜巡逻机和无人机的前出距离、巡逻线长度与反潜纵深、掩护扇面角度之间存在如下关系式:

式中:L为反潜纵深;φ为掩护扇面角。
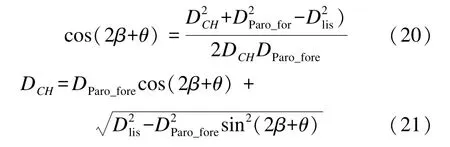
而当反潜巡逻机从巡逻线的M点飞到N点,处于C点的无人仍然在其监听范围内,此时应使CH的长度大于Dwarn,即在敌潜艇对编队中舰船实施导弹攻击之前,反潜巡逻机和其他区域反潜兵力已对潜艇至少实施一次攻击。相应的表达式可以表述为

在ΔCNH中,根据勾股定理可得:
5 实例计算
5.1 参数设置
反潜巡逻机有效监听无人机的距离40 km,巡航高度6 000 m,巡航速度460 km/h,续航时间6.5 h,转弯半径4 km。上级指定的巡逻时间为5 h,储备时间20 min。无人机发现水面通气管的距离为 70 km,速度为 300 km/h,巡航高度4 000 m,无人机发现敌潜艇时可能存在的艇位误差为20 m。预警机为反潜机提供的预警距离为260 km,发现敌机后,综合识别并发出警报时间15 s。红方歼击机阵位与基准点的距离为250 km,巡航速度为 900 km/h。空空弹最大射程为120 km,速度为4 Ma。无人机从发现潜艇目标,跟踪识别并向指挥所发出警报的时间为5 min;指挥员根据无人机获取的目标信息制定作战方案,给反潜巡逻机下达攻击命令持续时间为4 min;反潜巡逻机从巡逻空域快速飞向发现目标区,完成搜索、跟踪、攻击持续的时间在25 min。水面舰船编队的航速为24 kn。
蓝方攻击机的巡航速度1 200 km/h,空空导弹的射程150 km。敌潜艇反舰导弹有效射程110 km,速度2 Ma。潜艇以12 kn航速突破编队防潜警戒。
5.2 仿真计算
根据公式(1)-(8)可得

根据公式(9)-(14)可得:

上面计算说明,反潜巡逻机和无人机提供的反潜纵深满足护航反潜的需求,无人机前出的距离至少在80.52 km以上,而反潜巡逻机只需前出40.52 km即可,相应的反潜巡逻机用于巡逻警戒的时间延长。
而当反潜巡逻机的前出距离分别在50 km、60 km、70 km、110 km、120 km 时,由公式(15)-(21)可得编队反潜警戒纵深与掩护扇面角与反潜巡逻机前出距离之间的关系如图5和图6所示。

图5 反潜纵深随反潜巡逻机前出距离变化图Fig.5 Diagram of antisubmarine depth varying with front distance of antisubmarine patrol aircraft

图6 掩护扇面角随反潜巡逻机前出距离变化图Fig.6 Diagram of cover sector varying with front distance of antisubmarine patrol aircraft
从图5和图6可知,在反潜巡逻机巡逻线长度一定的情况下,反潜巡逻机和无人机提供的反潜纵深和掩护扇面角随着反潜巡逻机前出距离的增加而增加;在前出距离大于70 km以后,掩护扇面角开始急剧下降。基于反潜巡逻机最佳前出距离在70 km,反潜纵深在166 km时,掩护扇面角达到最大为 51°。
按照反潜巡逻机作战半径和续航时间之间的比例关系,前出距离越小反潜巡逻机在空中巡逻警戒时间越长[9],据此推算前出70 km的续航时间完全可以保证护航反潜任务的需要,降低反潜巡逻机使用批次,有效提高飞机的利用效率。
6 结束语
文章对反潜巡逻机和无人机协同反潜空域配置方法进行了探讨,通过仿真结果验证了反潜巡逻机和无人机协同护航反潜的可行性和实用性。其中编队反潜纵深和掩护扇面角与反潜巡逻机前出距离有直接关系,并给出了掩护扇面角最大时反潜巡逻机前出的距离,以及反潜纵深。而随着编队规模、作战环境和作战对象的不同,反潜巡逻机和无人机阵位,为编队提供的反潜纵深、掩护扇面角,以及巡逻线长度之间也会相应变化,并最终达到一种平衡,即作战效能最大化。
猜你喜欢
安徽文学(2021年11期)2021-11-09
红蜻蜓(2020年2期)2020-10-27
现代防御技术(2019年1期)2019-03-12
无人机(2018年6期)2018-09-10
陕西画报(2018年2期)2018-05-21
小天使·三年级语数英综合(2017年6期)2017-06-07
现代兵器(2016年9期)2016-09-14
畅谈(2016年5期)2016-07-04
中国疗养医学(2009年3期)2009-03-23
航空知识(2001年5期)2001-06-12
