基于LifeMoD对跳马运动员不同踏跳位置的仿真研究
2018-11-15 06:32李旭鸿郝卫亚
中国运动医学杂志 2018年10期
李旭鸿 郝卫亚
1杭州师范大学体育与健康学院(浙江杭州311121)2国家体育总局体育科学研究所
跳马比赛中,运动员完成任何类型的技术动作都要包括助跑、上板、踏跳、第一腾空、推手、第二腾空和落地等技术环节,其中踺子类动作还要多一个踺子上板。而助跳板的有效利用或者较好的起跳效果可以帮助跳马运动员成功地完成一些高难度动作,运动员通过快速有力的踏跳把助跑获得的能量转移到垂直和水平两个方向上的动量和角动量,进而拥有完成后续翻腾及转体技术动作的动力,这对于跳马运动员来说至关重要[1,2]。但遗憾的是,前期的研究大多是围绕踏跳技术与运动成绩之间的相互关系[3-5]或者助跳板的力学特性[1-2,6],很少有研究关注跳马运动员在不同位置踏跳的力学性能[7]。量化跳马运动员在不同位置踏跳后的起跳效果以及踏跳过程下肢承载的负荷情况,可以帮助我们深刻理解人-器械之间的动力学关系和优化助跳板的力学特性。另外,在实际训练中体操教练员一直都崇尚助跳板的“甜区”(sweet spots)功能,且起跳效果与踏跳的位置密切相关。鉴于上述,本研究针对实际跳马过程中不同踏跳位置展开生物力学研究,旨在确定跳马运动员在不同踏跳位置的起跳效果以及助跳板是否存在“甜区”,并探讨不同踏跳位置跳马运动员下肢所承载的内、外载负荷,为进一步根据运动员自身特点设计难、新技术动作提供理论支撑。
1 研究方法
1.1 研究对象
本研究选取2011年全国体操锦标赛女子跳马冠军(身高、年龄和体重分别为1.38 m、15岁和31 kg,运动等级为健将)完成的塚原后直转体720°的踏跳阶段(从双脚触板至双脚离开助跳板结束)作为目标动作。
1.2 实验流程
首先,利用2台高速摄像机(CASIO EX-F1)和三维PEAK标定框架对目标动作进行录像拍摄,拍摄频率设定为300 Hz,快门速度为1/320,标定完成后不作任何调整和移动。由于场馆的条件限制,仅能在运动方向的左侧放置摄像机完成视频采集,因此在人体运动分析系统SIMI Motion中也只对助跳板上板左侧边缘的中点(图1中A处)、最前端(图1中C处)以及踏跳阶段的14个标志点(图2)进行数字化分析。
利用二阶Butterworth低通滤波对原始数据进行过滤(10 Hz),获得跳马运动员踏跳阶段和助跳板上板A、C两处的运动学参数。
其次,在人体运动仿真软件LifeMoD中输入受试者性别、年龄、身高和体重等信息,根据回归方程计算其环节长度、围度、人体惯性参数等。再结合Python脚本语言程序把踏跳阶段的运动学数据引导至人体运动仿真软件LifeMoD中,完成人体模型关节中心与其实际运动捕捉的关节点的匹配,实现19个环节人体模型的构建。

图1 助跳板侧面示意图及尺寸(单位:cm)
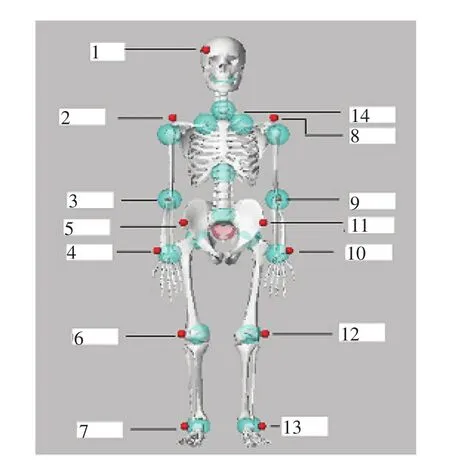
图2 人体关节点的选取示意图
根据中华人民共和国体操器械的国家相关标准,在机械动力学软件ADAMS环境下建立与体操运动员相接触的助跳板模型(长1.2 m×宽0.6 m×高0.2 m),且其上板与下板是由轴承铰链和弹簧连接(图3)。完成人体模型与助跳板之间的接触后,进行人体模型的空间位置和身体姿态调整,最后进行平衡分析以及逆向动力学和正向动力学分析。
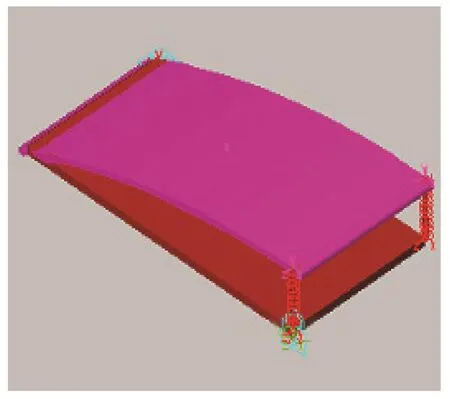
图3 助跳板的简易模型
在此过程,调试助跳板面体和弹簧的刚度、阻尼系数,根据仿真和实际运动的接触时间、重心速度及关节角度等指标完成对体操器械力学参数的简易优化[1,8,9]。随后再进行系统模型的敏感性和可靠性分析,结果显示所建立的人体-助跳板系统模型能较为真实地再现跳马运动员的踏跳过程,具体详见前期研究[1]。
最后,在系统模型优化的基础上,保持跳马运动员触板瞬间的水平和垂直速度、助跳板面体和弹簧的刚度、阻尼系数不变,仅改变助跳板的空间位置使之与跳马运动员在不同的助跳板区域接触,随后完成不同位置踏跳的仿真研究。当然,仿真过程跳马运动员的踏跳动作要保证在国际体联的允许范围之内,同时人体在运动过程中受到其运动轨迹的约束。
1.3 踏跳位置的定义和测试指标
定义:跳马运动员在踏跳过程其左侧踝关节标志点对应的踏跳位置为d(图1),当d≤OA为后区,OA<d≤OB为中区,OB<d≤OC为前区。本研究跳马运动员的踏跳位置分别在46.79 cm、67.14 cm、85.11 cm处。
测试指标:(1)助跳板上A、C两处垂直方向上最大压缩位移、最大回弹速度以及左侧踝关节(图2中mark点13)垂直方向上最大回弹速度(注:由于摄像机摆放在运动过程的左侧,因此本研究以不同位置踏跳左侧踝关节的回弹速度峰值代表人体在不同位置的起跳效果[7])。(2)跳马运动员在不同位置踏跳下肢所承载的踏板反作用力(board reaction force,BRF)、关节反作用力(joint reaction force,JRF)。上述动力学数据通过Butterworth进行低通滤波,其截止频率为50 Hz。
2 结果
2.1 不同踏跳位置的起跳效果
跳马运动员在后、中和前区三个位置上踏跳,助跳板上A和C两点垂直方向上的最大压缩位移和最大回弹速度以及左侧踝关节点的回弹速度峰值如表1所示,结果发现跳马运动员在后区踏跳除了C处的最大压缩位移较低之外,其他的指标均高于中、前区踏跳。

表1 跳马运动员在不同位置踏跳相应的起跳效果
2.2 不同踏跳位置下肢所承载的负荷情况
跳马运动员在前、中和后区踏跳,其BRF峰值在水平和垂直方向上都逐渐增大,且踏跳时间逐渐减少(图4a,b)。同时,跳马运动员在中区和前区踏跳的BRF峰值在水平方向上分别比后区减少16.1%、39.4%,在垂直方向上分别减少13.8%、25.2%。

图4 跳马运动员在不同踏跳位置所承载的踏板反作用力
结果发现,不论跳马运动员的踏跳位置如何,其下肢踝、膝和髋3个关节承载的反作用力峰值都逐渐减小,且下肢3个关节在前、中和后区的JRF峰值逐渐增大,同时踏跳时间也逐渐减少(图5)。对于踝关节而言,中、前区的JRF峰值比后区减少13.9%、31.3%(图5a);膝关节则减少了14.9%、32.5%(图5b);髋关节减少17.9%、35.6%(图5c)。
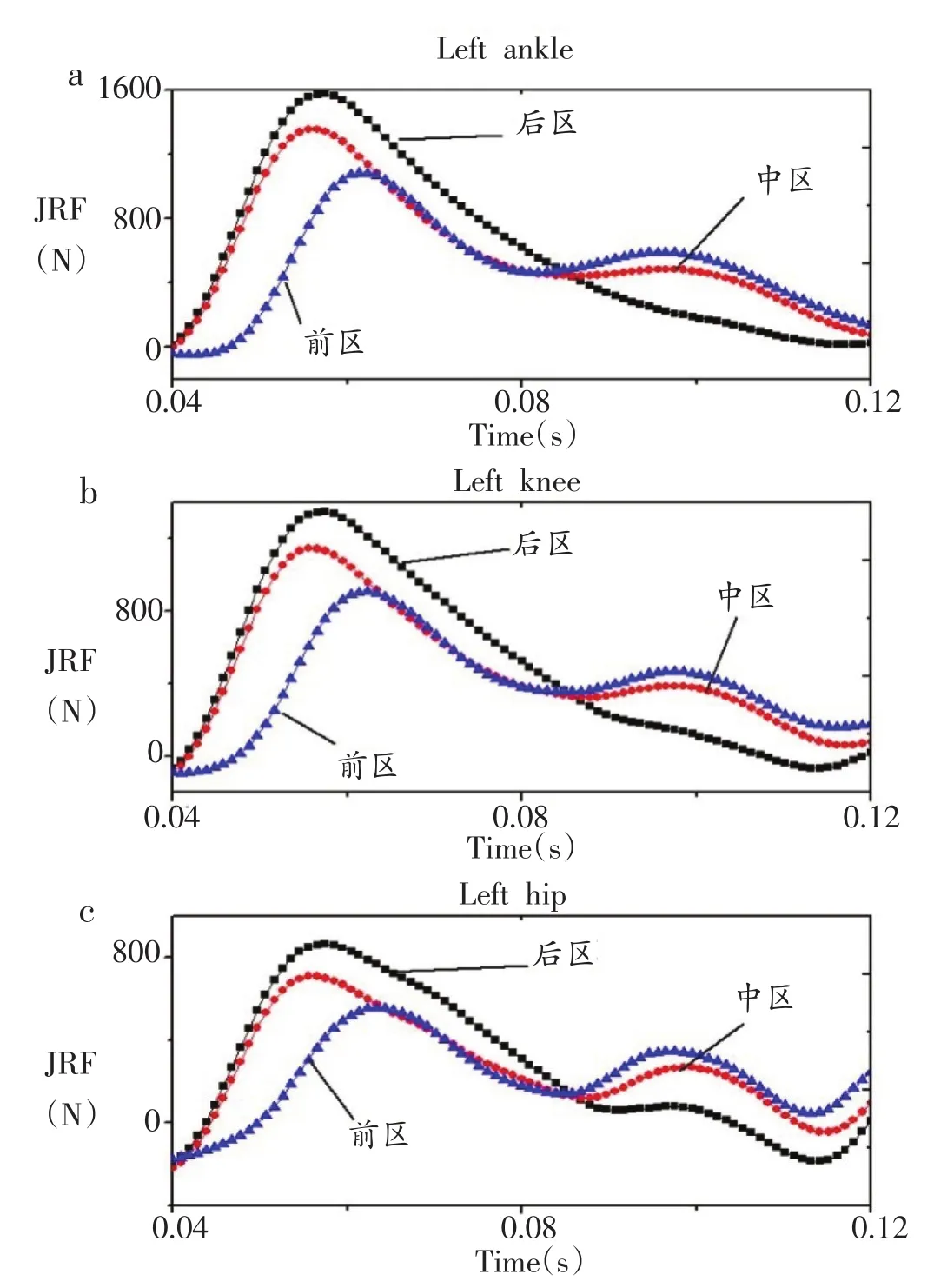
图5 跳马运动员在不同踏跳位置所承载的下肢关节反作用力
另外,上述研究仅针对后、中和前区中心位置进行研究,当双脚与助跳板接触的位置并非中心时,是否会出现截然不同的结果?本研究对踏跳的左右位置(在机械动力学软件ADAMS环境下移动助跳板5 cm)进行调整再完成相应的仿真与分析,结果发现:不论踏跳的左右位置如何变化,助跳板上A、C点的最大压缩位移和最大回弹速度以及左侧踝关节点的回弹速度峰值都无明显变化,同时不同位置踏跳过程中下肢所承载的BRF和JRF也无显著变化(由于与相应的中心位置差值百分比不足3%,因此不再赘述)。
3 讨论
在实际训练和比赛中,很难采用常规的生物力学测试方法和手段对跳马运动员展开不同位置踏跳的力学研究,毕竟每一名跳马运动员都有自身喜欢的助跑距离和踏板位置,而人体运动仿真软件的出现则提高了这种实验测试与力学分析的可能性。本研究主要是针对助跳板的结构特征,在机械动力学软件ADAMS环境下仅改变其空间位置,使跳马运动员在不同的踏跳位置以相同的速度完成踏板动作,探讨跳马运动员在不同位置踏跳的起跳效果以及下肢所承载的内、外载负荷,旨在为优化踏板技术和设计难、新技术提供理论支持。
通常,跳马运动员双脚上板后会有一定程度的缓冲,即通过膝、髋关节的屈曲和助跳板的下压变形来完成。下肢大肌肉群的屈曲拉长有助于蹬离助跳板发挥出最大的肌肉爆发力,同时助跳板的变形也有利于跳马运动员获得较大的弹性势能。从研究结果来看,跳马运动员在后区踏跳拥有较好的起跳效果(表1),其原因可能是助跳板后区的刚度较大,且踏跳时间较短,能很好地避免助跳板弹性势能的过多损耗,进而增加其踏板后获得的回弹速度[10,11]。当然,不可否认优秀运动员的踏板经验和身体动作控制能力在踏跳过程中扮演的重要角色,Nelson等[10]就曾指出优秀的跳马运动员都有能力通过助跳板,不仅可以有效避免水平速度过多的损失,而且还能很好地提升垂直起跳速度。Pflughoeft[12]也建议跳马运动员应积极配合助跳板的弹性,主动发力来获取最大的弹性势能。另外,研究结果并未出现教练员期望的“甜区”效应,也有悖于一些体操教练员的“甜区”认知,笔者认为主要的原因有两点:首先,从助跳板的结构特性来讲,后区由于弧度较大,跳马运动员较容易抓板,同时接触时间较短不会造成BRF过多的损耗;其次,跳马运动员在后区更容易利用助跳板的弹性特征,有效地把获得的弹性能量转化成垂直方向上的动能来完成跳马动作。当然,不同的体操运动员由于力量、身体等差异其下肢刚度也存在差异,Harwood[11]就曾指出体操运动员在踏跳的过程中,通常会通过自身的身体控制和调谐来补偿助跳板的刚度变化。
跳马运动员在后区完成踏跳与中、前区相比,下肢也将承载更大的BRF和JRF峰值(图4,5所示),由于在后区踏跳的时间较短,更容易抓住肌肉快速释放能量的生理特性,可以有效地减少弹性势能的衰减速度以及保证能量转化的最大化[7]。后区踏跳能获得较好的起跳效果,但与中、前区的差异并不明显,或许这微小的差异就决定着整套技术动作的成败和完成质量[4]。与此同时,下肢承载较大的内、外载负荷也会增加跳马运动员下肢损伤的风险,但提高踏板后的垂直起跳效果是体操教练员最为看重的。Coventry等[7]的研究指出跳马运动员在后区踏板的垂直起跳速度较大,说明该区域的起跳效果较为理想,这对于高水平运动员完成最终的难度和动作质量都有很大的影响。近年来,国际体联(FIG)在实际比赛中也允许跳马运动员根据自身完成的技术动作和难度自主调节助跳板弹簧的个数和位置。因此,在满足人体肌肉-骨骼系统需求的前提下,可以尝试后区踏跳来提高踏板后的垂直起跳速度,进而帮助完成更高难度系数的技术动作。
本研究对踏跳的左右位置变化也进行了相应研究,发现不论踏跳的左右位置如何变化,BRF和JRF都没有显著变化。对此,笔者认为这与助跳板和地面固定在一起,助跳板模型的两根弹簧位于左右边缘、并与助跳板的上板形成一个有机整体有关,也从侧面反映出当前使用的助跳板较宽的作用区域和稳定性大大减少了体操运动员踏跳失误的可能性,即减少了踏跳位置或区域对跳马运动员踏板技术的影响。
4 结论与建议
4.1 跳马运动员在助跳板的后区踏跳,可以有效地避免接触力的衰减和损耗,有助于提高起跳效果。
4.2 不论踏板点是否在中心位置,跳马运动员的起跳效果和下肢承载的负荷均无明显变化,进而也表明当前的助跳板以其较宽的作用区域和稳定性,大大减小了体操运动员踏跳失误的可能性。
4.3 在满足人体肌肉骨骼系统需求的前提下,跳马运动员可以尝试后区踏跳来提高踏板后的垂直起跳速度,进而帮助其完成更高难度系数的技术动作。
猜你喜欢
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
好孩子画报(2019年6期)2019-06-30
今日农业(2019年13期)2019-01-03
小学教学研究·新小读者(2017年9期)2017-10-25
小学教学研究·新小读者(2017年2期)2017-05-03
教育界·下旬(2016年4期)2016-11-19
小哥白尼·趣味科学画报(2015年7期)2015-11-14
戏剧之家(2010年2期)2010-08-15
小哥白尼·趣味科学画报(2009年8期)2009-08-07