
三电平逆变器滑模控制器设计及仿真实验研究
2018-11-16 09:11朱琴跃李朝阳解大波
实验室研究与探索 2018年10期
朱琴跃, 李朝阳, 戴 维, 解大波
(同济大学 电子与信息工程学院,上海 201804)
0 引 言
电力电子技术是电气工程及其自动化等本科专业的核心课程,主要内容包括各种电力电子器件的结构及其特性,四大变流电路的工作原理、电路结构、控制方法和参数计算等,具有理论与实践相结合的特点[1-3]。在目前的课程教学中,主要针对其中的核心知识模块——三电平逆变器结构及其控制方法的基本工作原理与相关理论分析进行重点讲解,对于不同控制策略、逆变器控制输出性能方面的优劣分析很少涉及[4]。
为此,根据当前不同应用场合对变流设备控制性能日益提高的技术需求,本文以中点钳位型(Neutral Point Clamped, NPC)三电平逆变器为例,在分析其电路结构及控制策略基本原理基础上[5],针对其空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)策略[6]不能很好满足某些特定应用对逆变器动态和稳态控制性能上的要求,设计了一种滑模控制器[7-12];并借助Matlab仿真软件,建立了相应的仿真模型[13-14];利用仿真结果分析了基于滑模控制器的改进后控制策略在提高三电平逆变器动态与稳态性能方面的优势。显然,上述滑模控制器的设计与仿真实验搭建过程可以通过在课堂上的展示以及相应仿真结果的对比分析,帮助学生理解、巩固和拓展关键知识点,激发其创新思维,提高教学效果[15-16]。
1 三电平逆变器控制策略分析
1.1 主电路工作原理
由图1所示的主电路结构可知,NPC三电平逆变器的每相桥臂包含4个功率开关管Sx1~Sx4,4个与之反并联的二极管VDx1~VDx4以及两个钳位二极管Dx1、Dx2,x=a,b,c。
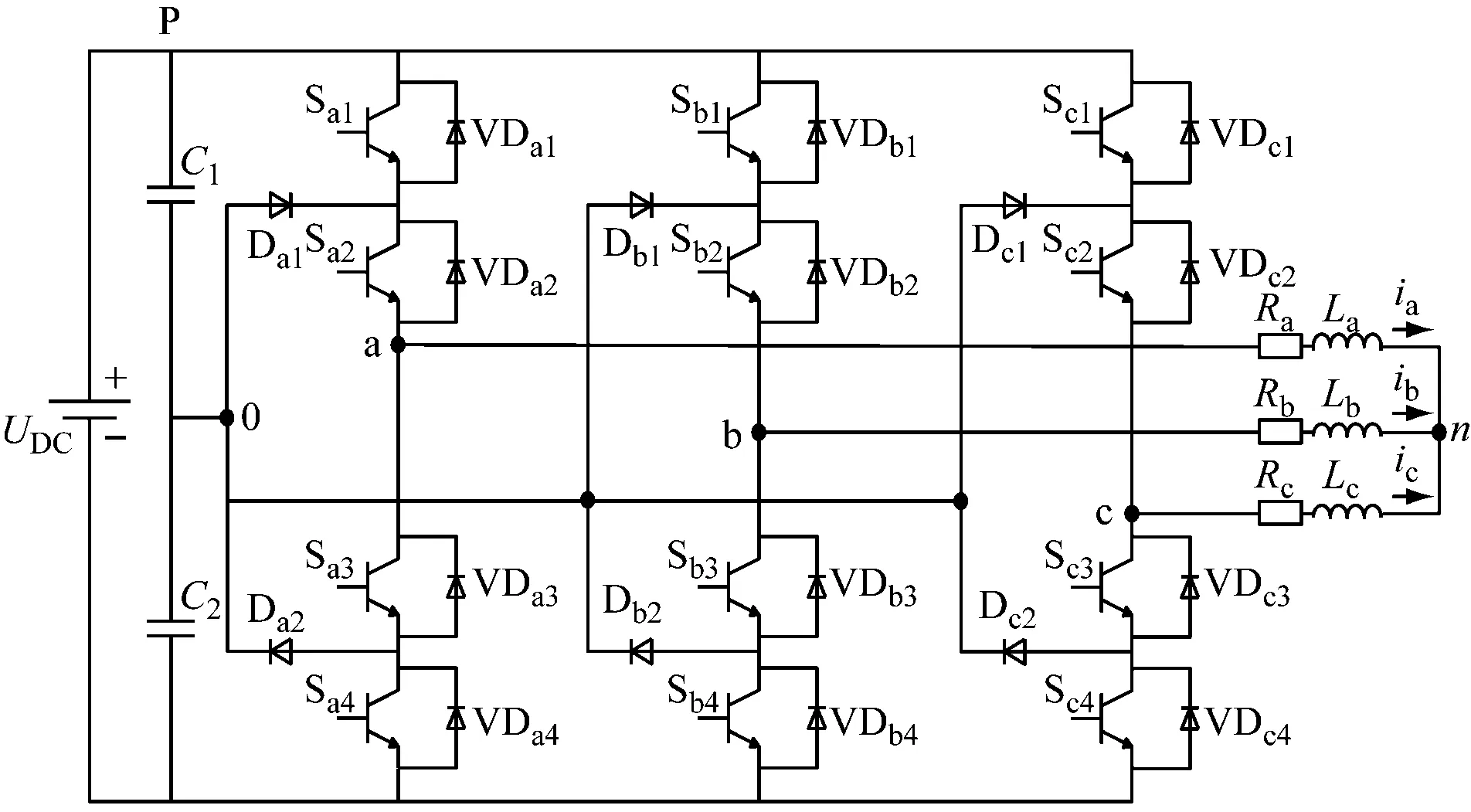
图1 NPC三电平逆变器主电路拓扑结构
逆变器每相桥臂4个功率开关管的通断情况决定了此桥臂的开关状态:以a相为例,当Sa1、Sa2导通且Sa3、Sa4关断时,桥臂开关状态为“P”;当Sa2、Sa3导通且Sa1、Sa4关断时,桥臂开关状态为“O”;当Sa3、Sa4导通且Sa1、Sa1关断时,桥臂开关状态为“N”。
假设逆变器每相桥臂的开关状态都由一个开关函数Sk(k=a,b,c)来表示,其中

(1)
则当直流侧电压为Ud时,该逆变器的三相桥臂输出相电压可表示为:
(2)
由此可得三相负载电压与各相开关状态间的关系为:
(3)
1.2 SVPWM控制策略
由上分析可知,逆变器每相桥臂都可以输出3种状态“P”“O”“N”,其对应的桥臂输出相电压分别为+Ud/2、0、-Ud/2,因此逆变器共可输出33=27种状态,每种状态对应一种电压空间矢量,由此可形成图2所示的电压空间矢量分布图,基于此便可得相应的SVPWM控制策略(算法)为:
(1) 根据系统要求,给定三相参考电压[uanubnucn]T,并基于a、b、c→α、β坐标变换,将参考电压变换到α-β坐标系下;
(2) 根据参考电压的幅值与相位,判断参考电压所处的扇区和区间;
(3) 根据一定的开关矢量选择规律确定开关矢量及其作用时间;
(4) 确定矢量作用顺序最终形成PWM控制信号。
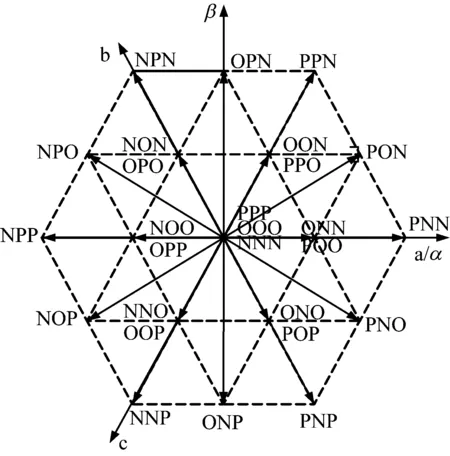
图2 NPC三电平逆变器空间矢量图
由上述分析可知,通过SVPWM控制算法可形成相应的PWM控制信号作用于三电平逆变器,在输出端获得系统所需的输出信号。由于此时的逆变器输入为一个标准的给定电压信号,不受输出信号的影响,故整个系统采用了开环控制方式,这样虽然结构简单、易于控制,但其控制精度不高、动态与稳态性能以及稳定性较差,在一些特定的应用场合,其控制性能往往无法达到要求。为解决此问题,本文提出一种基于滑模控制的三电平逆变器控制系统。如图3所示,该系统在传统三电平逆变器控制策略基础上加入滑模控制器,将原来逆变器输出信号作为滑模控制器的输入,以构成从输出端到输入端的信号反馈通路。通过闭环控制方式,提高逆变器的控制性能。该闭环系统的控制策略为:滑模控制器在对系统输出与目标给定信号进行比较的基础上,通过设计滑模面和切换函数实时输出电压控制信号,并将其经Clark变换后作用于SVPWM控制器使逆变器系统输出能实时跟踪给定目标,以获得预期的系统性能。
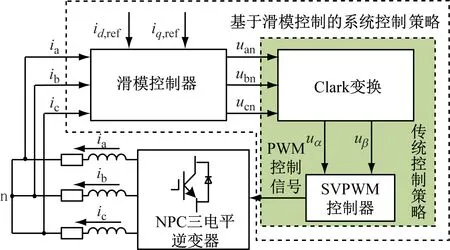
图3 基于滑模控制的三电平逆变器控制系统结构图
2 滑模控制器设计与建模
下面将根据滑模控制的基本原理,提出三电平逆变系统的滑模控制器计方法,并实现基于滑模控制的三电平逆变器控制策略的仿真建模。
2.1 逆变器状态空间模型
根据图1所示带有阻感性负载的三电平逆变器电路结构,可得其三相电路方程为:
(4)
式中:ia、ib、ic为三相负载电流;uan、ubn、ucn为三相负载电压;三相阻感性负载La=Lb=Lc=L,Ra=Rb=Rc=R。
由此可得逆变系统在a、b、c三相坐标系下的状态空间模型为:

(5)
式中:x=[iaibic]T,为系统状态变量;y=[iaibic]T,为系统输出变量;u=[uanubnucn]T,为系统控制输入;系数矩阵A、B、C可分别表示为:A=diag[-R/L,-R/L,-R/L],B=diag[L,L,L],C=diag[1,1,1]。
2.2 滑模控制器设计
2.2.1滑模控制基本原理

2.2.2滑模控制器设计
滑模控制的设计具有较强的灵活性,对于式(5)所描述的三电平逆变系统,其滑模控制器的设计分3步实现:① 设计系统滑模面函数;② 选取合适的趋近律,设计系统控制函数,迫使系统进入动态滑模状态,形成滑模区;③ 根据可达性条件确定所设计的滑模面在系统状态空间内是否可达。
(1) 滑模面函数设计。针对上述状态空间模型可设计滑模面函数为:
s=i-iref
(6)
式中:i=[iaibic]T,为系统三相输出电流;iref=[iarefibreficref]T,为系统三相参考正弦输出电流。
(2) 控制函数设计。常用的趋近律有等速趋近律、指数趋近律、幂次趋近律和一般趋近律4种,为使系统输出信号以一个较快的速度跟踪参考信号,且系统的抖振尽可能小,本文采用指数趋近律:

(7)
式中,sgn(·)表示符号函数。
对式(6)求导可得:
(8)
联合上述各式可得:
u=-εsgn(s)-qs-Lωi
(9)
式中,Lωi对u值的影响不大,所以可将控制函数简化为:
u=-εsgn(s)-qs
(10)
(3) 滑模面可达性证明。定义李雅普诺夫函数为:
V=s2/2
(11)
对式(11)进行求导后可得:
(12)
(13)
因此,当参数ε、q满足式(13)时,所设计的滑模面在系统状态空间内可达。
2.3 滑模控制器仿真模型
为便于仿真,将2.2节中滑模控制器的所有变量与参数都变换到dq坐标系下,由此可得:
(14)
式中,qd、qq为大于零的常数。
所以,滑模控制器仿真模型如图4所示。

图4 滑模控制器仿真模型图
3 仿真实验与分析
在上述滑模控制器仿真模型已搭建完毕的基础上,为了进一步观察并对比分析控制策略改进前后对NPC型三电平逆变器控制性能的影响效果,采用Matlab/Simulink软件建立了上述两种不同控制策略下的逆变器仿真模型。如图5所示,该仿真模型中仿真参数为:直流母线电压Ud=1.5 kV,电阻负载R=15 Ω,电感负载L=33 mH,逆变器开关频率fs=10 kHz,三相电流基频f=50 Hz,取滑模控制器参数qd=1 000,qq=130;经过仿真实验而得的结果分别如图6~8所示。

图5 三电平逆变器系统仿真模型图
图6~7为基于滑模控制的三电平逆变器控制系统三相负载电压与三相负载电流仿真波形,由图可知,基于滑模控制的三电平逆变器所输出的电压、电流波形与原理分析基本吻合,由此验证了本文所设计滑模控制器的有效性。
图8为三电平逆变器分别在传统开环控制策略与基于滑模控制的闭环控制策略下的负载电流交轴分量iq波形对比图,由此进一步计算而得的各项性能指标如表1所示。


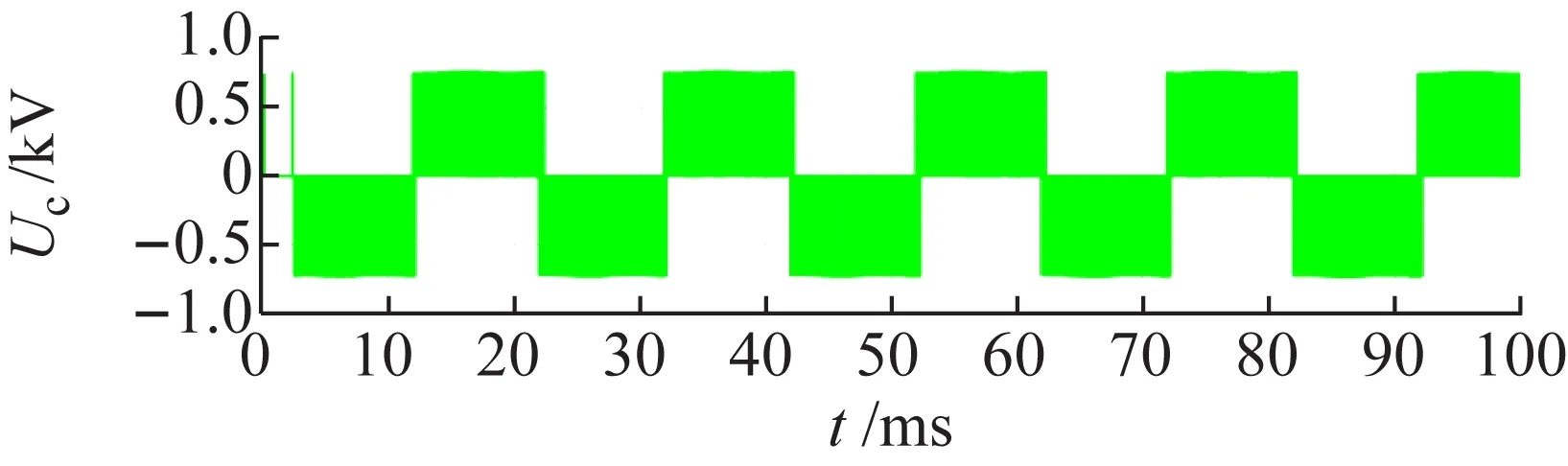
图6 滑模控制的逆变器三相负载电压波形
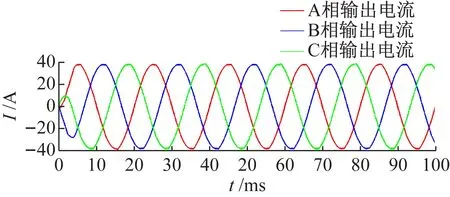
图7 滑模控制的逆变器三相负载电流波形

图8 三电平逆变器负载电流交轴分量波形图
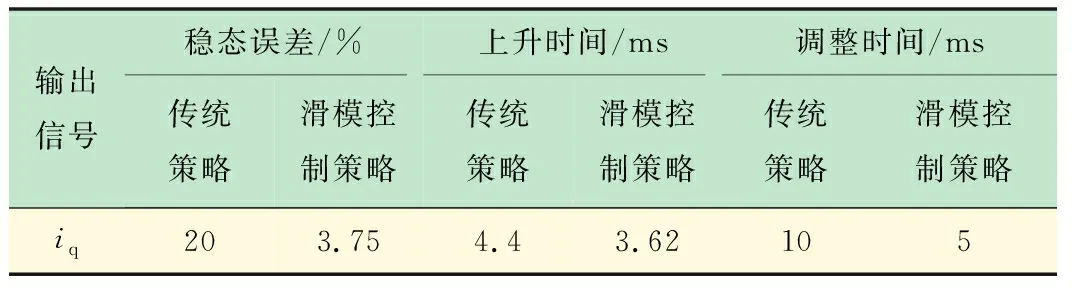
输出信号稳态误差/%上升时间/ms调整时间/ms传统策略滑模控制策略传统策略滑模控制策略传统策略滑模控制策略iq203.754.43.62105
由图8和表1可知,基于滑模控制的逆变器闭环控制系统的稳态性能和动态性能较传统逆变器控制系统而言都更为优越,前者的快速性和对预期输出响应的逼近程度都更好,即闭环滑模控制系统能更好的跟踪参考信号,体现了滑模控制优良的控制性能,进一步验证了本文所设计滑模控制器的有效性。
4 结 语
本文在传统三电平逆变器控制系统基础上,加入滑模控制器构成闭环反馈系统模型。通过滑模控制器的设计及仿真,验证了改进控制策略的有效性和稳定性。仿真结果表明,改进后控制策略具有鲁棒性与稳定性好、精度高、动态稳态性能优越等优点。在教学中针对拓展知识点进行仿真实验,可以比较容易、准确地获取仿真波形,有效地帮助学生加深理解不同控制策略对逆变器控制性能的影响,激发学生开拓思维,调动学生的探索积极性,从而取得更好的教学效果。
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电测与仪表(2016年22期)2016-04-12
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年12期)2015-04-09
电测与仪表(2015年2期)2015-04-09
电测与仪表(2014年7期)2014-04-04
电测与仪表(2014年14期)2014-04-04
