
基于智能控制器的AGV集成控制与智能化研究
2018-12-11 03:13高飞
设备管理与维修 2018年19期
高 飞
(承德市交通运输局通信管理处,河北承德 067070)
0 引言
AGV(Automated Guided Vehicle,自动引导车)作为一种具备自动化无人驾驶特征的智能化搬运设备,属于一种移动式机器人[1],能够按照预设的路径行驶,并配合载物台完成物料搬运工作及装配。AGV具备工作灵活、高效、智能化等显著特点,非常便于生产制造系统的柔性重组,实现生产过程物料的柔性化搬运,已成为智能制造及现代物流自动化系统不可缺少的关键设备之一[2]。它以电池为动力,以工业控制器或工控机为核心进行自主式导引,并可根据实际需要配备不同的移载机构,以完成相应的操作任务[3],AGV属于典型的轮式智能AGV范畴,智能AGV根据移动方式的不同,可分为足式移动、轮式移动、履带式移动、爬行及蛇形移动等5大类[4]。
随着智能制造及工业4.0的发展,AGV作为联系和调节离散型物料管理系统使其作业连续化的必要自动化搬运装卸设备,其应用范围和技术水平得到了迅猛的发展[5]。AGV将朝着3个方向发展:淤智能化。AGV通过搭载智能控制系统,强化AGV的智能运算功能,使之能够与企业的各类信息系统,如MES(Manufacturing Execution System,制造执行系统)、智能仓储、PLS(Production Line System,生产线系统)等实现无缝融合,打造全柔性、高度自动化的现代化企业制造加工及物流系统[6]。于集成化。AGV作为智能AGV的一个分支领域,未来发展应进行集成化,利用AGV移动的优势,搭载各类机械手,实现物料搬运、零部件装配甚至柔性制造加工单元[7]。AGV控制系统向开放型控制器方向发展[8],便于标准化、网络化,系统集成度提高,提高兼容性、扩展性和操作性。同时,AGV小车的智能传感器集成开发将所有突破,除采集位置、速度、加速度等传统信息,还应用机器视觉、力反馈等多传感器的融合技术来决策控制[9]。盂重载化,AGV目前主要应用定位于市内,而室外AGV技术一直是应用的难点,比如港口自动智能码头,不但需要AGV在比较恶劣的环境下正常运行,还需要满足搬运60 t集装箱的需求[10]。
本文针对未来AGV控制器的集成化和智能化发展趋势,开发专用于两轮差速驱动AGV的开放式集成控制器。核心芯片采用三星公司基于ARM Cortex-A9内核设计的S5P4418,主频1.4 GHz。控制器集成了伺服驱动电机控制接口、惯性导航、编码器、串口、以太网(含无线)、蓝牙、I/O,ADC(Analog-to-Digital Converter,模拟数字转换引脚)、串口及视觉传感器等各类外围控制与通信接口,实现了一块智能控制硬件集成AGV控制器所需的全部功能。同时为降低各种智能算法和数据交互接口的开发难度,移植了嵌入式linux操作系统,便于快速开发各类AGV集成控制系统。
1 智能AGV控制器硬件架构与设计
随着机器人技术的不断进步,AGV的智能性不断提高,对其控制系统的要求也越来越高。传统AGV的控制系统通常以80C51,AVR(单片机类型)等单片机或PLC为核心构成,其具有处理能力及外设支持类型有限、难以实现复杂的控制算法等缺陷[11]。集成控制器核心芯片采用三星公司基于ARM Cortex-A9内核设计的S5P4418,主频1.4 GHz,主要实现逻辑控制、数据运算、通信控制等[12]。根据AGV的发展趋势,设计智能AGV硬件组成结构,如图1所示。
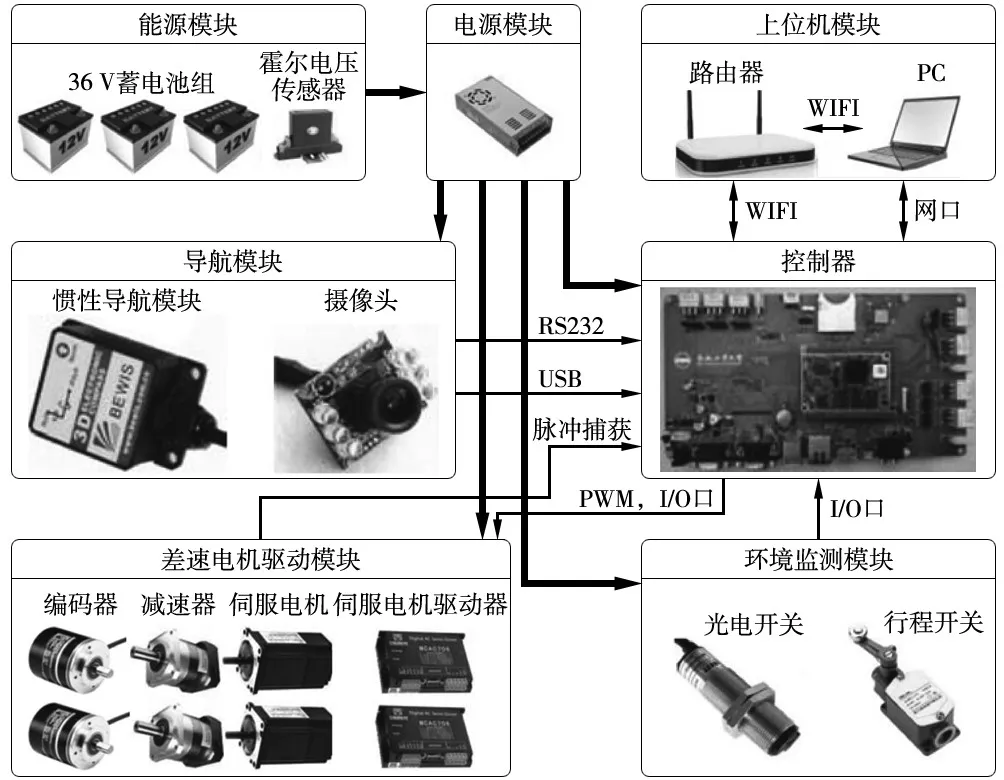
图1 AGV硬件组成架构
智能AGV车体搭载36V蓄电池组,具有较高的可靠性、环境适应性;采用双电机差速驱动形式,提高灵活性,降低对环境的范围要求;采用TCP/IP通信方式[13],通过有线或无线网的方式与外界上位机组成局域网进行数据及指令交互,实现网络控制。智能AGV控制器获取惯性导航及摄像头图像数据,结合编码器轮速信息计算后,对AGV进行横、纵向及角度控制。同时,智能AGV通过光电传感器[14]与行程开关[15]感知环境,能够进行有效避障。蓄电池组装有霍尔电压传感器,使得智能AGV能够获得自身电量信息,在低电量时自动回充。
综合AGV硬件组成架构,考虑一定的设计冗余,集成控制器包含以下硬件及接口资源:6个光电传感器,12 V供电;6个行程开关传感器,5 V供电;2个惯性导航传感器,5 V供电;2个轮速光电编码器,12 V供电;2个摄像头(视觉传感器接口),12 V供电;3路伺服电机控制接口,兼容市面上大部分伺服电机驱动器与步进电机驱动器;10 M/100 M以太网(含无线);6路模拟电压读取接口。集成控制器硬件资源及接口如图2所示。
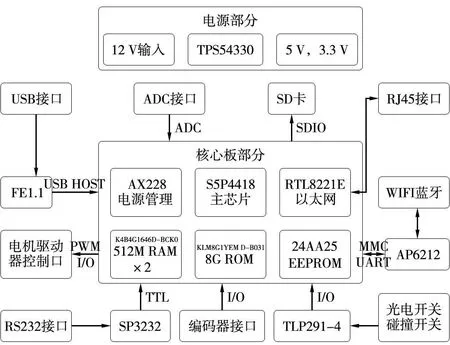
图2 集成控制器硬件资源及接口
2 AGV运动学模型的建立
首先对AGV及其工作环境进行假设:行驶路面为一平面,且在行驶过程中车轮及车体不发生形变;两驱动轮作纯滚动,横纵向均不发生侧滑、偏移;在负载和空载两种情况下车体的轮距、轴距等机械结构参数均不发生变化。
AGV在行驶过程中的位姿是对AGV进行控制的基础,位姿是指在绝对坐标系中智能AGV的位置和姿态。智能AGV的位姿信息用位姿矩阵P=[x,y,兹]T表示,其中x表示AGV相对于绝对坐标系原点X轴方向的距离,y表示AGV相对于绝对坐标系原点Y轴方向的距离,兹表示左右车轮连线的中垂线与Y轴的夹角,如图 3所示,其中,R,Rl和 Rr分别代表AGV中线、左轮和右轮到路径轨迹圆心的距离。
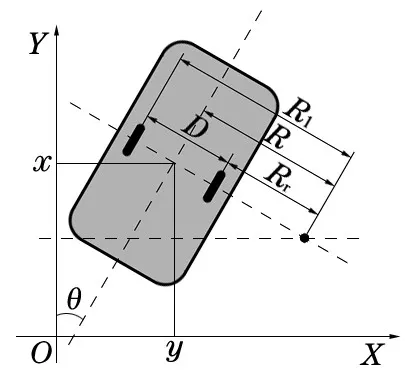
图3 AGV运动学示意
本文研究的是差速轮式AGV,从运动特性分析建立位姿矩阵与左右轮速度间的关系。建立准确的运动学模型是进行导航控制算法设计的基础,如图1所示为本文设计的智能AGV运动学模型,假设t时刻AGV差速运动,右轮速度vr约左轮速度vl,左右轮的行驶轨迹均为圆弧,AGV右转,质心速度为v,在驻T时间间隔内,转过角度驻兹为:

式中,D为两轮间距,R为行驶路径轨迹圆半径。

AGV在X,Y方向的速度分量以及驻T时间间隔内横摆加速度(定义逆时针方向为正方向)为:
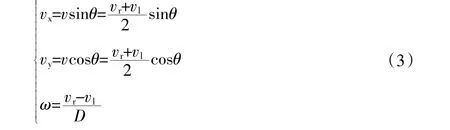
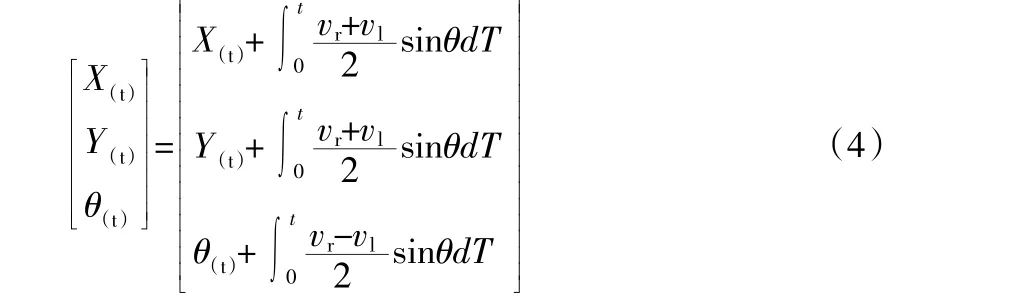
规定初始位姿 P=[x,y,兹]T=P=[x0,y0,兹0]T,得到任意时刻位姿矩阵与左右轮速间的关系。
3 导航控制系统算法设计
3.1 惯性、视觉联合导航方法设计
在智能AGV的行驶路径中每隔特定距离驻d处放置一个带有位置信息的二维码,构建导航栅格地图,视觉传感器对二维码进行扫描并提取出二维码中的位置信息以及在此时智能AGV相对于该位置的纵、侧向及角度偏差。利用离散的二维码位置信息消除惯性导航[16]的积累误差。图4所示二维码经过扫描后获取的信息为0010001100500060003,图 5为对二维码信息的解读。
3.2 控制方法设计

图4 辅助导航用二维码
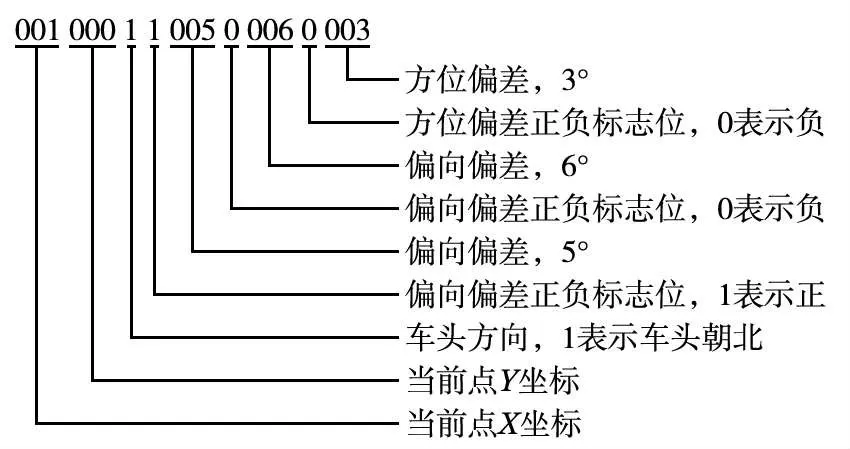
图5 二维码信息解读
结合AGV的运动学模型,通过纵向偏差控制得出控制速度vc,侧向偏差控制得出期望横摆角速度棕r,进一步计算得到AGV左右轮控制转速,实现对AGV运动轨迹的控制,如图6所示。
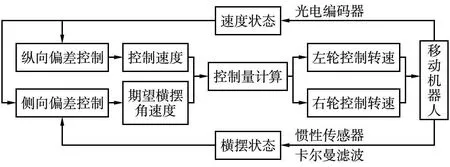
图6 智能AGV速度控制流程
AGV的侧向偏差控制采用PID控制算法,通过对两轮差速驱动以达到对车体横摆状态的控制。对AGV的纵向偏差采用一个闭环的控制回路进行控制,使AGV在起步和停止时呈现一个平滑的加减速过程,根据当前速度、目标速度以及纵向偏差距离来实时计算其在当前速度情况下纵向偏差距离内达到目标速度所需加速度大小,以该加速度大小为依据对速度进行控制。
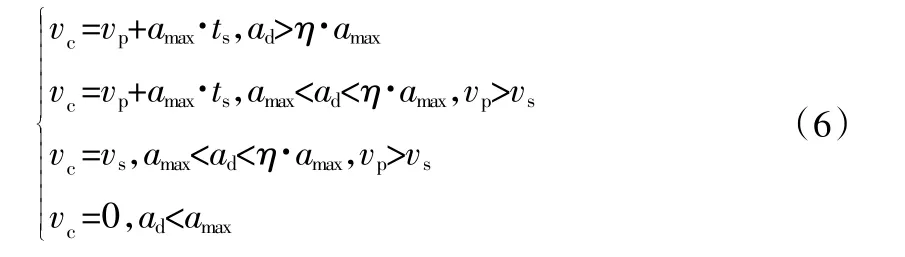
在当前状态下(当前速度和当前纵向偏差)达到目标速度所需加速度为:

其中,vp为智能AGV的当前速度,vt为智能AGV的目标速度,Dl0为纵向偏差距离。计算得到ad后将其与最大加速度amax、安全系数浊和最大加速度amax的乘积进行比较,得出在各种情况下的控制速度vc。
如图7所示,0~t1时,以最大加速度进行加速行驶,t1~t2时为匀速行驶,t2~t3时以最大加速度进行减速行驶,在t3时刻速度减为vs时,保持匀速行驶,当视觉传感器采集到二维码数据时(t4)进行减速直到停止(t5),纵向偏差控制过程充分体现了复合导航的思想,两种导航方式进行切换,使控制更加精确。
4 导航控制算法仿真及实车试验
将上述设计的导航控制算法在Matlab/Simulink中建立运动仿真模型,进行仿真。并将导航控制算法移植至智能AGV控制器,在搭建好的智能AGV测试平台(图8)上进行实车试验,智能AGV的基本参数信息见表1。
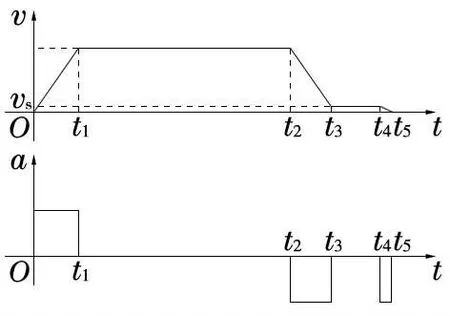
图7 纵向控制方法效果
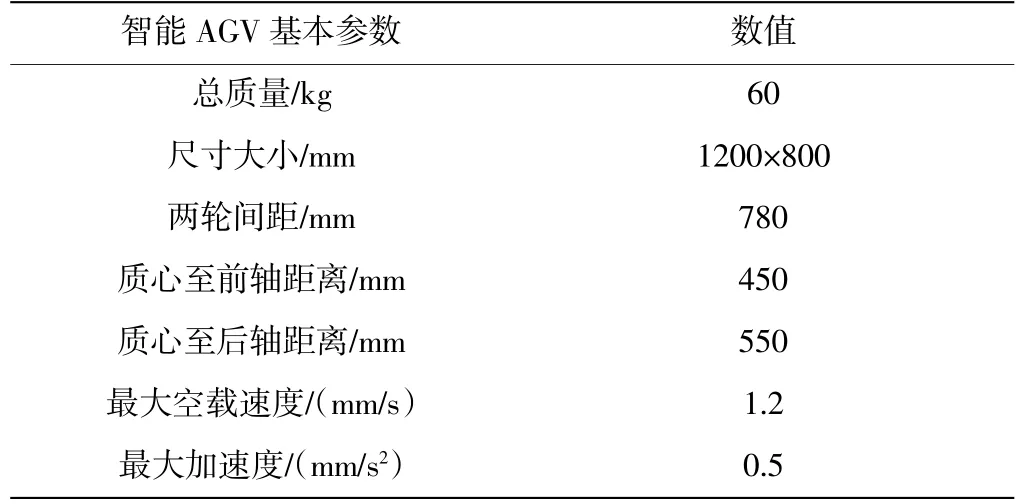
表1 智能AGV的基本参数
在仿真时和试验时设定相同的初始偏差,图9和图10分别为直线、圆弧形式的仿真及试验轨迹曲线。综合图9和图10可知,试验与仿真的误差控制在一个较小的范围内,导航控制算法移植到智能AGV集成控制器能够很好的达到预期的控制效果。在直线行驶过程中智能AGV会根据给定的初始偏差进行调整,最终将误差控制在一个很小的范围内,效果明显,车身的抖动小,调整平缓,可靠。在进行圆弧运动时,行驶一个圆圈后智能AGV能够回到起始点位置,这也是高精度控制的直接体现。
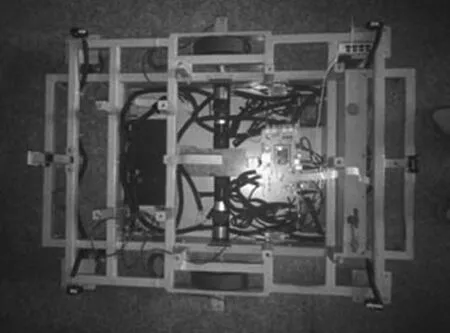
图8 智能AGV测试平台
5 结论
针对未来AGV将朝着“智能化、集成化、重载化和模块化”方向发展的趋势,研究设计基于ARM Cortex-A9处理器的AGV集成控制器,不仅提高了AGV控制系统的硬件设计可靠性,降低了AGV控制器的设计成本,还大幅提高了AGV的集成化和智能化水平。本文设计的集成控制器能在高速移动中快速做出各类控制参数响应,实现纵向控制误差10 mm,侧向误差8 mm,角度偏差1°,为研究设计高集成度和智能化AGV提供了较好的工程技术支撑。
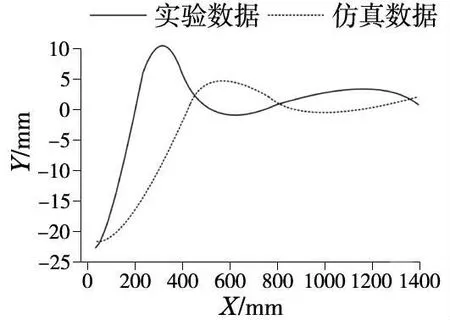
图9 直线、圆弧行驶仿真
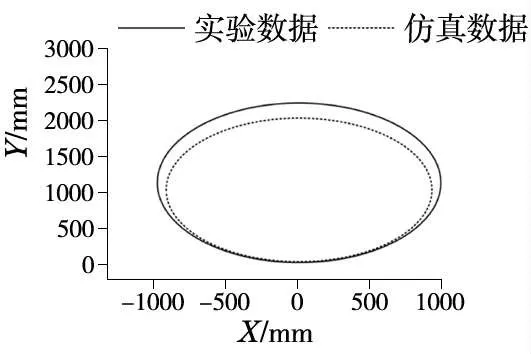
图10 试验轨迹曲线
猜你喜欢
童话世界(2020年32期)2020-12-18
心声歌刊(2020年5期)2020-11-27
制造技术与机床(2017年6期)2018-01-19
学生天地(2017年10期)2017-05-17
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
电源技术(2015年9期)2015-06-05
电测与仪表(2014年14期)2014-04-04
