基于GRNN的人机交互下遥操作力预测方法
2018-12-18 06:33:32熊鹏文
东南大学学报(自然科学版) 2018年6期
熊鹏文 雷 耀 李 鸣
(1东南大学仪器科学与工程学院, 南京 210096)(2南昌大学信息工程学院, 南昌 330031)
随着机器人行业的不断发展,遥操作机器人能协助人类实现感知能力和行为能力的延伸,在一些人类无法到达的危险环境下完成作业任务,因而受到了国内外广泛的关注[1-3].在一些需要精细化作业的人机交互遥操作控制中,例如眼部、心脏等重要器官手术[4]以及核电站内[5]或空间站舱外作业[6-7],对遥操作的控制精度以及透明性[8]都具有很高的要求,需要操作者在主动端能够准确地知道末端机器人作业过程中的力、位置等信息,以避免因操作不当造成不可逆的影响.文献[9-10]通过改进控制器的算法,从而达到保证遥操作系统稳定性的同时提高系统透明性,但对于力信号的研究不多,不能保证操作者准确感知作业过程中的接触力信息.文献[11-13]为了提高系统的透明性,除了位置和速度信号外,在控制结构中也应用了力信号,但其稳定性分析只针对线性双边遥操作系统,而实际在许多机器人作业任务中,动力学模型往往都是非线性的.文献[14-15]在主动端和从动端上结合了一种改进的滑动模式双边遥操作算法,并给出了外部力的估计,缺点是没有考虑闭环系统反射的力,而力反射是双边遥操作系统的重要目的之一.上述方法都能在某种程度上提升遥操作系统的稳定性或透明性,但不能使操作员准确地知道自己向遥操作系统施加的力(手控器所反馈的末端接触力)的大小,进而感知末端精细化作业过程中的接触力,从而增强人在人机交互中的共融性.因此,对操作者准确感知末端接触力信息精准度的研究很有必要.
本文提出了一种基于机器学习[16]的信息融合[17]方法.采用GRNN进行信息融合,将手控器的姿态信息与手臂肌电信号以及末端机器人的速度和加速度作为输入,末端机器人的接触力信息作为输出,导入GRNN中进行样本训练.基于训练完成的GRNN预测末端机器人的接触力,并将其与真实力进行对比,从而证明方法的有效性.
1 系统构成
为了能准确地感知末端机器人作业过程接触力信息,本文采用了具有力反馈的遥操作机器人平台搭建力感知系统,包括力反馈手控器(主动端)和遥操作机器人(从动端).当末端机器人与目标物体接触时将会产生力反馈到主动端手控器,根据牛顿第三定律,操作人员的手臂将会受到大小相同的力以及自身施加的力,两者共同作用引起手臂肌电信号的变化,手控器端同时也会把位置、速度等信息通过通信通道传输给末端机器人,以控制末端机器人进行作业.作业过程中,末端机器人会产生接触力信息,将会和位置等其他信息一起反馈给手控器端.操作者根据这些信息进行主观判断,从而对手控器进行位置调整,完成整个精细作业(见图1).整个系统分为遥操作机器人系统[18]和肌电信号采集系统[19]两部分.

图1 系统框架
1.1 遥操作机器人系统
遥操作机器人系统是对人类感知能力和行为能力的延伸.系统由操作者、主机、从机、通信通道和环境5个部分互相联接(见图2).
主动端采用一个具有六自由度的Phantom Omni控制器(见图3).它具有对反馈信息做出灵敏感应的优点,其数据采集频率为1 kHz.通信通道通过电脑MATLAB软件里面的simulink工具进行模块编程来搭建.从动端是一个具有力反馈的机器人,可以在X,Y,Z三个方向上移动,机器人末端可装卸多种刀具作为末端夹持器(见图4).数据的采集频率为1 kHz.本次所用的力传感器感知范围为-30~30 N,装配在末端机器人的刀具上方(见图4).
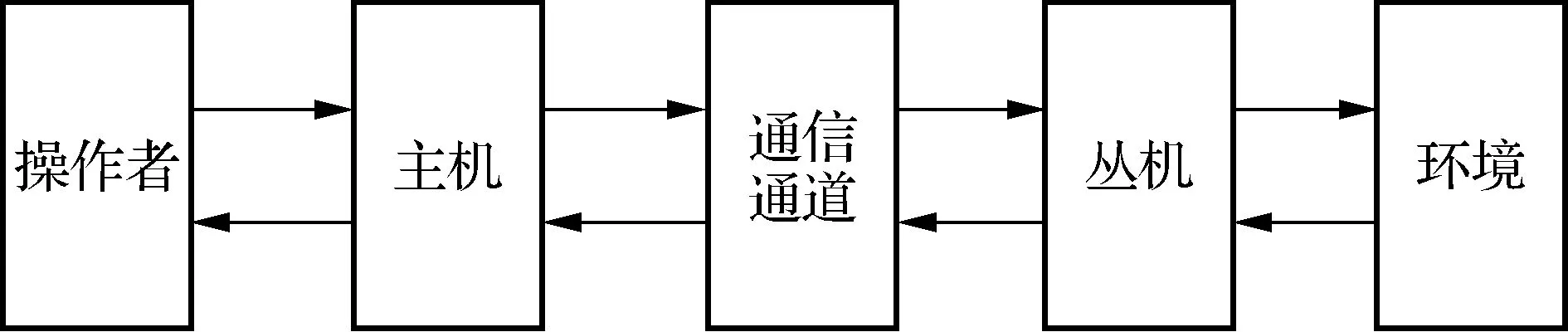
图2 遥操作机器人系统框架

图3 Phantom Omni控制器

图4 末端机器人
通过Phantom Omni控制器采集的姿态信息,需要运用Phantom Omni运动学及其方程来进行转换.Phantom Omni运动学结构见图5.其运动学方程式为
xm=-sinθ1(L2sinθ3+L1cosθ2)
(1)
ym=-L2cosθ3+L1sinθ2+L3
(2)
zm=L2cosθ1sinθ3+L1cosθ1cosθ2-L4
(3)

图5 Phantom Omni运动学结构[20]
式中,xm,ym,zm表示串联机构末端点F的空间位置;θ1,θ2,θ3表示控制器前3个关节的旋转角度;L1,L2分别为链路1和2的长度;L3,L4分别为终端执行器的起始点与第1个关节点的高度和水平距离偏移量.此处,L1=133.35 mm,L2=133.35 mm,L3=23.35 mm,L4=168.35 mm.
为了获得速度和加速度,需要利用雅克比矩阵,其方程为
(4)

(5)
式中
Jm1,1=-cosθ1L2sinθ3+L1cosθ2
Jm1,2=-L1sinθ1sinθ2
Jm1,3=-L2sinθ1cos3
Jm2,1=0
Jm2,2=L1cosθ2
Jm2,3=L2sinθ3
Jm3,1=-L2sinθ1sinθ3-L1sinθ1cosθ2
Jm3,2=-L1sinθ2cosθ1
Jm3,3=L2cosθ1cosθ3
末端机器人的速度、加速度等信息同样可以通过正运动学模型求得,其模型与Phantom Omni控制器相同.
1.2 肌电信号采集系统
表面肌电信号(sEMG)是一种非平稳的微弱信号,是肌电信号(EMG)和神经干上的电活动在皮肤表面的叠加反应,能够反映出神经、肌肉的活动状态.EMG则是肌纤维中的运动单元产生的动作电位序列.
本文采用的肌电信号传感器包含8个数据通道,可以与电脑进行无线连接,具有远距离进行实验的优点,而且可以调节设备的采集频率,以便与其他设备进行数据同步.实验中采集频率为1 kHz.将电极片粘贴在操作者手臂上,进行sEMG信号采集.其中,信号变化最为明显的区域为大臂的肱二头肌以及前臂的尺侧腕屈肌和尺侧腕伸肌.sEMG信号采集分布见图6.
所测得的sEMG信号是一个时间序列信号,必须经过预处理和特征提取之后才可以描述手部特征,通常在时间域进行特征提取,常用特征包括平均绝对值(MAV)、方差(VAR)、零交叉(ZAC)和威廉森振幅(WA).本文采用了前2种特征值,数学方程式为

(a) 肌肉区域分布
(5)
(6)

2 GRNN神经网络
GRNN属于径向基神经网络[21],主要被用于解决非线性问题,具有非线性映射能力、高度的容错性和鲁棒性等优点.该算法能在样本数据较少的情况下保证较高的准确率,对于不稳定数据也具有良好的预测效果.
GRNN网络结构由输入层、模式层、求和层和输出层组成(见图7).

图7 GRNN结构图
输入层的每一个神经元都是简单的分布单元,直接将输入量传递给模式层的每一个神经元.模式层的每一个神经元对应不同的样本,模式层神经元的传递函数为

(7)
式中,I∈Rn×1为样本输入;Ii为第i个神经元所对应的样本输入;σ为光滑因子;n为输入层神经元总数;Pi为模式层第i个神经元的输入值.
求和层中使用了2种方法进行求和.第1种方法是将所有连接权值设为1,对模式层中所有神经元的输出进行求和,求和层的传递函数为
(8)
第2种方法是对模式层中所有神经元进行加权求和,求和层的传递函数为

(9)
式中,wij为模式层第i个神经元与求和层第j个神经元的连接权值;SNj为求和层第j个神经元的求和值;k为输出向量的维数.
输出层的计算是将求和层中2种求和方法所得值相除,计算公式为

(10)
式中,Oj为输出层第j个神经元的输出值.
构建GRNN后,将输入数据与输出数据导入GRNN中进行训练.
3 实验与数据分析
由于末端机器人会对不同目标物进行多种作业,因此为了保证预测末端接触力信息的准确性进行了2组对比实验.第1组对比实验是对泡沫板和纸盒2种材料分别进行穿刺;第2组对比实验是对泡沫板分别进行穿刺和切割2种作业.为了保证实验数据的可靠性,每一次实验都在材料的不同位置点完成作业动作.
实验中,实时采集手臂的肌电信号、Phantom Omni姿态信息以及末端机器人的速度、加速度和接触力信息.分别对2组对比实验采集了1.2×104个样本数据.每一组手臂肌电信号信息拥有2项不同特征,即时间域上提取的MAV和VAR特征值.每一组Phantom Omni姿态信息拥有3项不同特征,分别对应坐标系的X,Y,Z轴的位置信息.末端机器人的速度和加速度信息分别对应6个关节共12项特征.采用GRNN分别对2组对比实验的数据进行测试.首先,将1.2×104个样本数据随机抽取1/2作为训练集,另外1/2作为测试集,即训练集和测试集各包含6×103个样本数据.然后,将肌电信号、Phantom Omni姿态信息和末端机器人速度、加速度共21项特征作为输入,末端机器人的接触力作为输出,训练GRNN模型.参数spread表示隐含层高斯函数的宽度,其值大小对GRNN性能产生重要影响,一般取值为0~2.实验采用交叉验证循环方式确定spread值,最佳spread值为0.03.为了证明GRNN的有效性,采用相同数据集训练BP神经网络,并将结果与GRNN结果进行对比.
训练完成后,将测试集中的数据导入算法模型,对接触力进行预测,并与实际的力反馈进行对比.穿刺纸盒实验对末端机器人接触力的预测与实际的力反馈对比结果见图8.由图可知,穿刺纸盒实验中GRNN和BP神经网络的均方误差分别为0.24和0.69.穿刺泡沫板实验对接触力的预测与实际力反馈对比结果见图9.由图可知,穿刺泡沫板实验中GRNN和BP神经网络的均方误差分别为0.16和0.23.切割泡沫板实验对接触力的预测与实际的力反馈对比结果见图10.由图可知,切割泡沫板实验中GRNN和BP神经网络的均方误差分别为0.13和0.46.
由图8~图10中2种算法的预测结果与真实值的差异可知,GRNN明显优于BP神经网络,且在GRNN中2组对比实验的均方误差值差距较小.因此,基于GRNN可以准确预测出遥操作系统末端机器人在作业过程中的接触力信息.
4 结论
1) 利用信息融合技术,将手臂肌电信号信息和遥操作机器人的矢量信息两者结合,取得了较好的效果.
2) 通过算法对比结果可知,GRNN相比BP神经网络拥有更好的预测效果.
3) 实验结果表明,通过GRNN可以较为准确地预测末端机器人作业过程中的接触力信息,同时也验证了该方法的有效性和可行性.

(a) GRNN预测对比

(c) GRNN误差

(a) GRNN预测对比

(c) GRNN误差

(a) GRNN预测对比

(c) GRNN误差
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22 07:44:40
重型机械(2019年3期)2019-08-27 00:58:48
科技传播(2019年24期)2019-06-15 09:29:28
测控技术(2018年5期)2018-12-09 09:04:28
电子制作(2018年9期)2018-08-04 03:31:12
北京航空航天大学学报(2017年9期)2017-12-18 07:12:22
新作文·小学高年级版(2017年2期)2017-09-06 07:55:49
儿童绘本(2016年24期)2017-01-05 10:14:20
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:55
少年博览·小学高年级(2015年2期)2015-01-23 10:21:28