
基于标签概率假设密度滤波器的抗交叉眼干扰方法*
2018-12-21 03:22陈安娜
弹箭与制导学报 2018年2期
陈安娜
(中国空空导弹研究院,河南洛阳 471009)
0 引言
雷达干扰与抗干扰技术相互制约,也相互促进[1-2]。交叉眼干扰技术是近年来兴起的一种新型角度欺骗干扰技术,能够将单脉冲雷达诱偏至干扰连线的角度之外。通常,交叉眼干扰可以作为飞机、舰船等作战平台的自我防护手段[3-4]。
随机有限集理论(random finite set,RFS)[5-7]的提出,给雷达信号处理技术提供了新思路。在随机有限集理论中,概率假设密度(probability hypothesis density,PHD)滤波器[8-11]是一种计算可行的多目标滤波器。在PHD滤波器的基础上,研究人员给目标加上相应的标签[12-14],用于区分不同的目标轨迹,提出了标签PHD滤波器[15-16]。
文中引入标签PHD滤波器用于雷达信号处理抗交叉眼干扰。首先,将交叉眼干扰场景建模为多目标场景。然后,在随机有限集的框架内分析了干扰与目标存在与否的各种情况。最后,引入标签PHD滤波器,给目标和干扰分配不同的标签,根据标签区分目标与干扰。仿真表明标签PHD滤波器可正确得到真实目标的状态估计,且误差较小。
1 交叉眼干扰机理与建模
1.1 干扰机理
交叉眼干扰的本质是相干两/多点源角度诱骗,采用两个或多个在空间上相隔一定距离的干扰辐射源,发射模拟雷达回波,并使其在功率或相位等参数上满足一定条件,各发射信号合成雷达天线相位中心所在空间点的局部特殊辐射场,使雷达误认为辐射源在另外的虚假位置,形成虚假的目标。
1.2 多目标建模
交叉眼干扰并不会使真实目标的回波信号减弱,而是通过引入两点源相干干扰形成偏离真实目标的虚假强干扰源。从雷达信息处理角度,可以将干扰存在时的雷达接收回波建模为一个弱目标和一个强干扰点。
2 随机有限集分析
2.1 随机有限集描述

W表示为:
(1)

(2)
C可以表示为:
(3)
根据得到的有限集模型,需要在得到一个观测集Z且不知道目标和干扰是否存在的情况下,判断出目标是否存在并估计出目标的状态信息。文中把目标和干扰当成多个目标处理,引入标签PHD滤波器对目标和干扰进行跟踪。
2.2 PHD滤波器与标签PHD滤波器
Dk|k(x)表示多目标后验概率密度的一阶矩近似,在随机有限集理论中通常叫做PHD。
PHD滤波器的预测方程为:
(4)
式中:φk|k-1(x,ξ)=bk|k-1(x|ξ)+ek|k-1(ξ)fk|k-1(x|ξ),bk|k-1(·|ξ)表示衍生目标集,ek|k-1(·)表示目标的存在概率,fk|k-1(·|·)表示单目标的转移概率密度,γk(·)表示新生目标集Γk的PHD。
PHD滤波器的校正方程为:
Dk|k(x)=LZk(x)·Dk|k-1(x)
(5)
式中:
(6)
Lz(x)表示观测似然函数,λk表示杂波数目均值,ck(z)表示杂波空间分布。PD(·)表示检测概率,且
(7)
传统的PHD滤波器只能得到每一时刻多个目标的位置,并不会给出各个时刻目标之间的联系。为解决具体目标的轨迹问题,研究人员提出了标签PHD滤波器。
标签PHD滤波器基本思想为:在传统粒子PHD滤波器的基础上,为每个粒子添加一个身份标签,且将粒子分为不同的划分,每个划分代表一个目标,各个划分的标签不同,在后续的粒子状态转移和重采样过程中粒子标签保持不变。在进行多目标状态提取过程时,按照粒子的位置维进行聚类划分,此时各粒子划分中可能含有多种不同的标签,于是将各粒子划分中粒子数目最多的标签置为该粒子划分中所有粒子的新标签,最后通过对估计的多目标状态与原航迹进行关联实现航迹管理。
3 标签PHD滤波器抗交叉眼干扰
标签PHD滤波器抗交叉眼干扰的框图如图1所示,采用粒子滤波近似实现标签PHD滤波器,具体流程包括预测、校正、重采样、状态估计、航迹提取五部分。
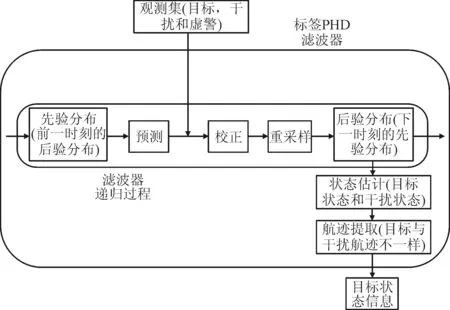
图1 标签PHD滤波器抗交叉眼干扰框图
3.1 预测
粒子按式(8)完成粒子预测。
(8)

(9)

(10)
3.2 校正

3.3 重采样

3.4 状态估计
粒子重采样后,需要提取多目标状态,即完成多目标状态估计。对所有粒子进行聚类处理,得到k时刻的多目标状态估计为:
(11)

3.5 航迹提取
定义A:
(12)



4 仿真实验

xk=F(ωk-1)xk-1+Gwk-1
(13)
式中:
(14)
(15)
其中wk-1=[wx,k-1,wy,k-1,wω,k-1]T表示过程噪声。过程噪声为零均值高斯白噪声,方差分别为σx=σy=10 m/s2,σω=π/360 rad/s。
假定雷达位于坐标系原点,目标在波束覆盖范围内运动,雷达得到的目标观测包括距离和方位信息,观测方程为:
(16)
式中:wr,k、wθ,k分别为距离和方位上相互独立的零均值高斯白噪声,标准差分别为σwr=5 m、σwθ=π/14 400 rad。
考虑到设置低门限的同时,会使单脉冲雷达得到少量杂波生成的观测,设置虚警数目的均值为λ=2,虚警数目在时间上服从泊松分布,而虚警的空间分布为雷达视场区域内的均匀分布。目标、干扰以及观测如图2所示,实线表示目标和干扰的实际值,×号表示每一时刻的观测值,既有真实目标产生的观测,也有干扰产生的观测,还有杂波产生的观测。
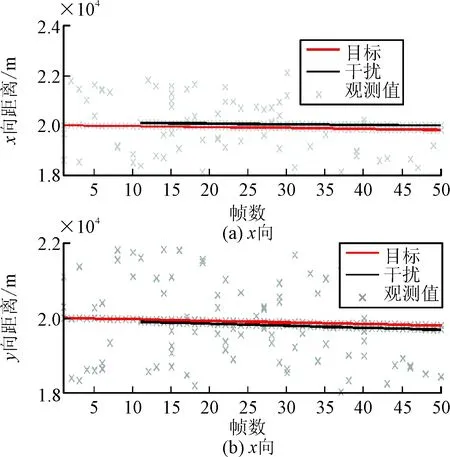
图2 目标、干扰和观测
模拟单个目标的粒子数为2 000个,新生粒子根据上一时刻的观测采样得到,数目为200个。为了衡量对于目标状态的估计误差,采用最优子模式分配(optimal sub-pattern assignment,OSPA)距离[17]来计算估计误差。
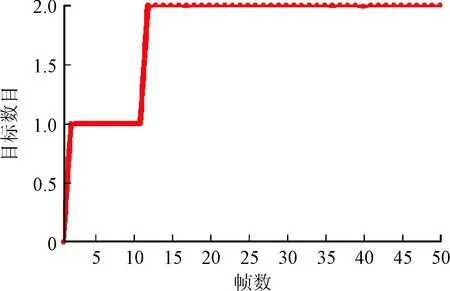
图3 滤波器目标数目估计
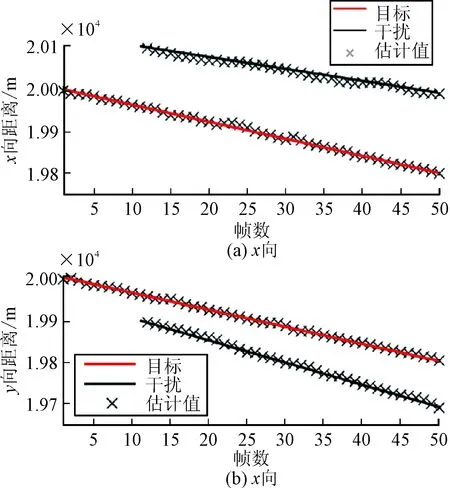
图4 滤波器估计结果
图3所示为标签PHD滤波器得到的目标数目估计。可以看出,滤波器在第12个采样时刻开始,判断场景中目标数目为2,即干扰出现。图4、图5所示为滤波器在每一时刻对目标状态的估计结果和识别结果,实线表示目标和干扰的实际值,×号表示每一时刻的估计值,圆圈表示滤波器识别出的目标信息。可以看出滤波器能够准确估计出目标和干扰所在的位置。
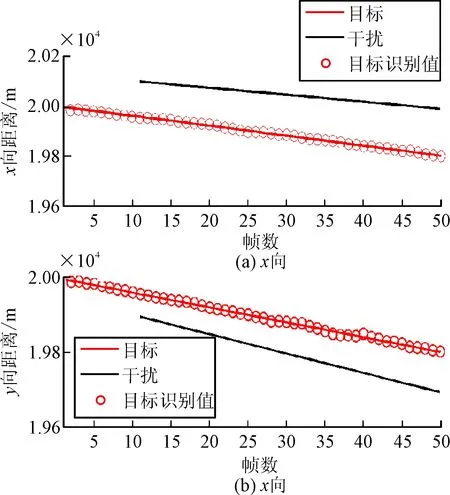
图5 滤波器跟踪及识别结果图
图6给出了滤波器对位置信息估计的误差,可以看到估计误差小于10 m。

图6 跟踪误差
5 结论
交叉眼干扰技术是近年来兴起的一种新型角度欺骗干扰技术,对应的抗干扰技术也在不断的深入研究。文中引入的标签PHD滤波器针对雷达首先检测目标信号、干扰之后释放情况可有效区分目标和干扰信号。仿真表明,该情况下标签PHD滤波器能够在干扰释放后正确的识别出真实目标信号,并实现对真实目标的状态信息估计,且误差较小。
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
今日农业(2021年12期)2021-11-28
小猕猴智力画刊(2021年6期)2021-08-05
初中生世界·八年级(2019年6期)2019-08-13
电子制作(2019年11期)2019-07-04
小学生导刊(低年级)(2016年9期)2016-10-13
小学生导刊(低年级)(2016年6期)2016-07-02
作文大王·低年级(2016年3期)2016-03-11
中学理科·综合版(2008年3期)2008-03-07
