极低信噪比下应答机的关键技术研究
2018-12-26 06:11郝占炯李春萍
无线电工程 2018年1期
郝占炯,李春萍,秦 奋,何 舟
(上海航天电子技术研究所,上海 201109)
极低信噪比下应答机的关键技术研究
郝占炯,李春萍,秦 奋,何 舟
(上海航天电子技术研究所,上海 201109)
针对火星探测任务X频段深空应答机的高灵敏度接收处理要求,提出了扫频+频域校正、时分复用的方法解决极低信噪比下载波捕获技术,设计了一种数字载波环路方法解决高灵敏度跟踪技术。在信号强度为-155 dBm条件下,进行了捕获算法和跟踪算法的仿真,并对算法改善前后的仿真结果进行了比较分析。仿真结果表明,采用扫频+频域校正、时分复用的捕获方法能够较好地改善FFT输出信噪比和减少捕获时间;在弱信号条件下,采用FLL+PLL结合的数字载波环路跟踪技术,可以大大缩短跟踪时间。
深空应答机;载波捕获;锁频环;锁相环
0 引言
到目前为止,人类对火星的探测有40次左右,成功率1/3多,认识还很不全面。但是人类对火星寄予了深切的希望,仍在坚持不懈地对火星进行科学探测[1]。
X频段深空应答机是火星环绕器测控与通信系统的关键组成,是构成整个通信链路的枢纽之一[2]。由于深空探测的特殊性,除要求深空应答机体积小、质量轻、功耗低且长寿命以外,还应具有特别宽的动态范围,可适应航天器从地面准备阶段、近地轨道阶段和深空轨道阶段的大范围变化[3];具有极高的接收解调灵敏度,可在信噪比非常低的条件下,准确、及时、有效地解调出地面的上行遥控指令,并准确、及时、有效地测量出航天器的运行轨迹、位置和运行速度[4];具有各种调制方法的能力,能够进行模拟调制和数字调制,能够胜任和完成测控、数传对下行调制的要求;具有同地面深空测控网协同工作能力;具有与地面甚长基线干涉仪协同完成高精度测角工作的能力[5]。因此,X频段深空应答机与现有近地轨道飞行器应答机相比有极大的不同,有许多需要先行解决的关键技术,如极低信噪比下载波捕获技术和高灵敏度跟踪技术都是深空应答机极具重要的技术[6]。
本文分别采用扫频+频域校正、时分复用的方法解决极低信噪比下载波捕获技术和设计数字载波环路的方法解决X频段深空应答机高灵敏度跟踪技术,并通过仿真数据来验证本文所采用的方法正确性。
1 载波捕获技术
在模拟遥测接收机中,采用频率扫描以适应多普勒效应,同时采用相位调制负反馈技术抑制副载波,以完成全频段内对主载波的识别与捕获。其环路结构相对复杂,且扫描速度较慢[7-9]。在X频段深空应答机设计方案中,采用数字装配处理模块进行载波捕获和跟踪,全频段运用FFT技术进行主载波的识别与捕获。
根据要求,信号的多普勒效应不超过250 kHz,故对前端应保证相应的信号带宽。在采用FFT对频谱进行分析前,需要根据载波的信号强度设定频谱的分辨率,并根据FFT的分辨范围对整个频谱范围进行分段搜索。为保证检测的可靠性,常规载噪比下(优于-130 dBm)每个频率点的检测信噪比要尽可能高,若考虑4 096点FFT,则初步的频谱分析方案如表1所示。根据表1,FFT输出仿真结果如图1、图2、图3和图4所示。
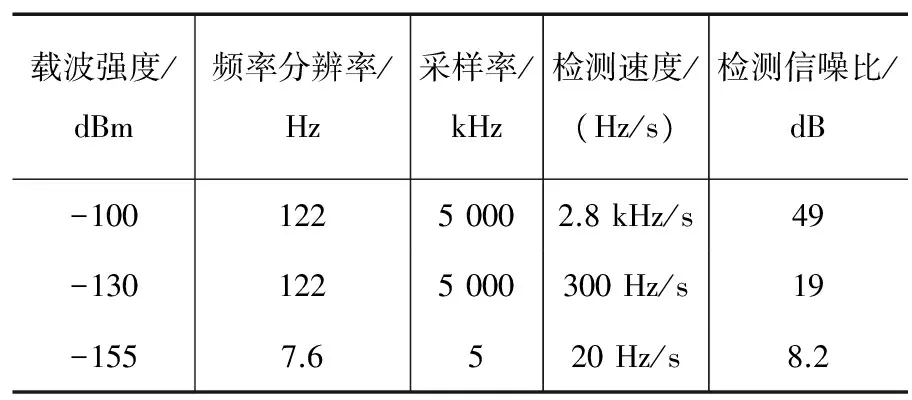
表1 载波捕获设计分析表
仿真结果表明,采用扫频+频域校正、时分复用的方法不仅可以改善FFT输出信噪比,而且大大降低了硬件复杂度,减少了捕获时间。
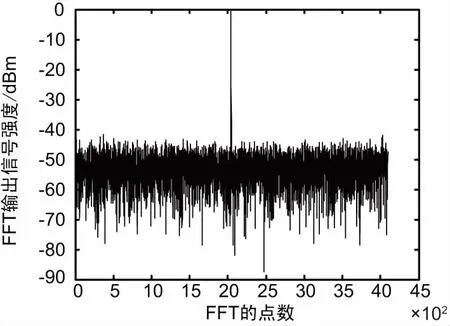
图1 载波强度为-100 dBm时的FFT输出
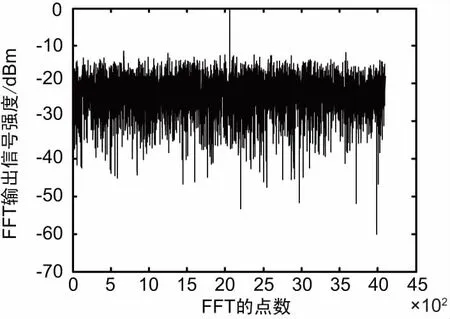
图2 载波强度为-130 dBm时的FFT输出
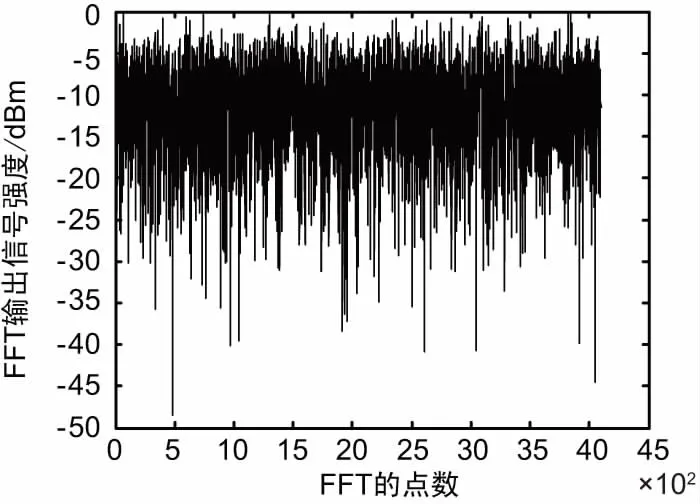
图3 校正前载波强度为-155 dBm时的FFT输出

图4 校正后载波强度为-155 dBm时的FFT输出
2 高灵敏度跟踪技术
极限载噪比下,由于传统PLL在跟踪性能和噪声容限上的局限,对-155 dBm的信号跟踪较难实现。但由于被跟踪的对象是单载波,在信号初步检测成功后,仍可以采用频谱分析+信号处理的方法进行跟踪,具体流程如图5所示。
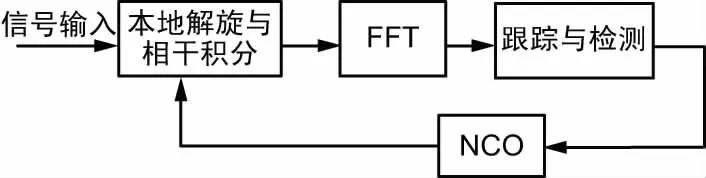
图5 高灵敏度跟踪
跟踪环路设计包括载波跟踪环路和码跟踪环路两大部分,其中载波跟踪分为FLL和PLL[10-12]。潜在的难点问题是失锁判定准则鲁棒性、定点环路的系数优化设计与实现、FLL对PLL的辅助、载波环辅助码环以及同步、捕获复位准则等[13-14]。FLL和PLL分别采用二阶和三阶环路滤波。
2.1 FLL设计
FLL相对于PLL,对动态的应力较好。为应对同样的动态,FLL的阶数可以比PLL的阶数低一阶[15]。所以载波跟踪FLL采用二阶环路,一阶滤波器实现。
一阶最优环路滤波器为:
(1)
式中,Kd=1,为最小二乘频率鉴别器的增益,为NCO的增益;K=KdKv为环路滤波器的增益;wn为环路的自然频率[16]。
相应的载波环的滤波器为:
(2)
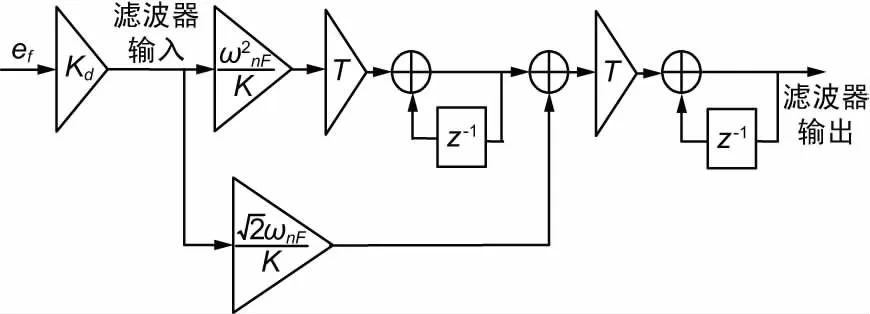
图6 二阶FLL的环路滤波器数字实现
二阶载波环路滤波器的离散传递函数为:
(3)
其实域对应表达式为:
y(k) -2y(k-1)+y(k-2)=
(4)
式中,T为滤波器输入采样时间间隔;ωn为环路的自然频率,ωn=1.89BLF;BLF为环路的带宽。
2.2 PLL设计
环路滤波器的选择要考虑2个参数:滤波器阶数和噪声带宽。这2个参数的选择直接决定着环路对输入信号的动态响应[17]。一阶跟踪环路(环路滤波器F(s)=1)可以跟踪相位阶跃输入,而且没有稳态相位误差,但在跟踪频率阶跃输入时,就会有稳态相位误差;理想二阶跟踪环路(环路滤波器为一阶),可以跟踪相位阶跃和频率阶跃信号,且无稳态误差,但在跟踪频率斜升信号输入时,就会有稳态跟踪误差;三阶跟踪环路(环路滤波器为二阶)可以正确跟踪相位阶跃、频率阶跃和频率斜升信号,且无稳态误差。
采用二阶环路滤波器,即三阶跟踪环路,其最优环路滤波器为:
(5)

对应二阶FLL的环路滤波器数字实现图,K=KdKv为环路增益。环路滤波器数字实现框图如图7所示。
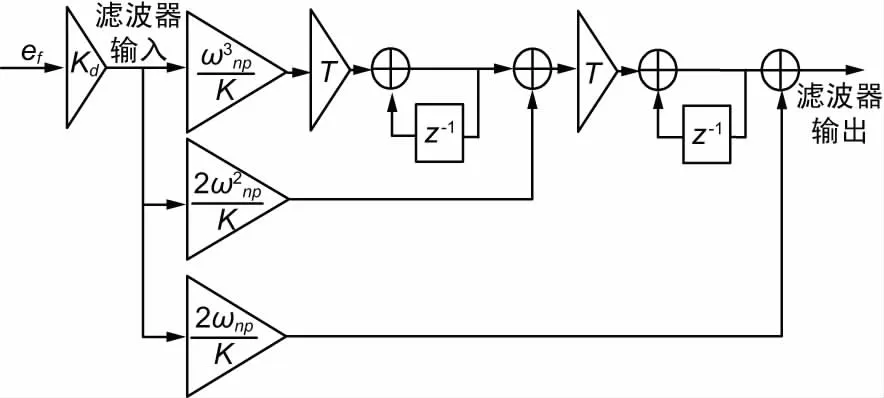
图7 三阶PLL跟踪环的环路滤波器数字实现
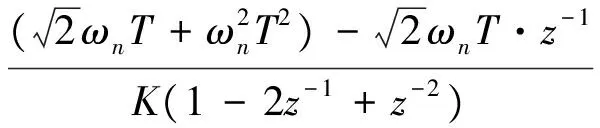
环路滤波器的离散传递函数为:

(6)
其时域对应表达式为:

(7)
式中,ωnP=1.2BLF,BLF为跟踪环路带宽;T为环路滤波器采样时间间隔(等于环路更新时间)。
2.3 仿真分析
这里重点仿真低信噪比下载波跟踪情况,根据上面的载波跟踪算法设计,设载波强度为-155 dBm,频偏5 Hz时,NCO输出情况如图8和图9所示。
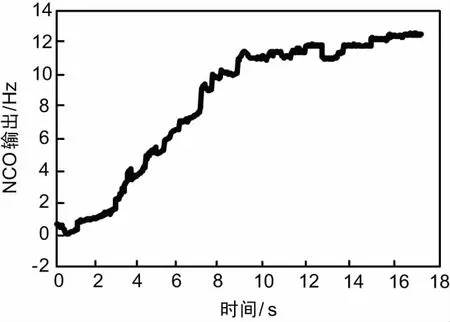
图8 传统PLL跟踪算法NCO输出结果
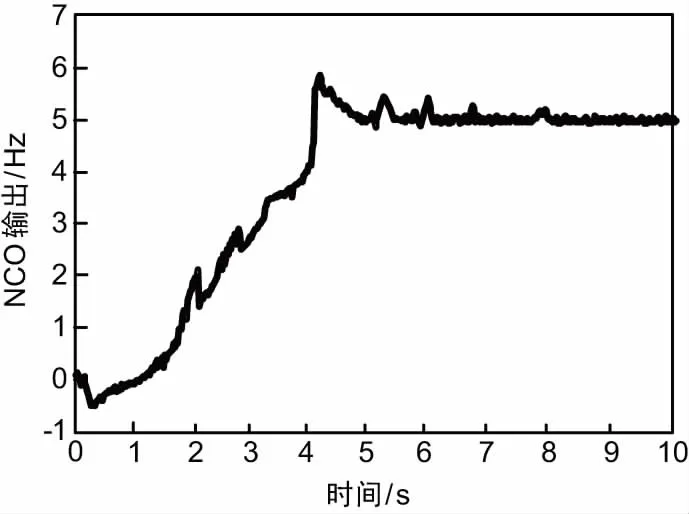
图9 FLL+PLL结合的跟踪算法NCO输出结果
仿真结果表明,采用FLL+PLL结合的数字载波环跟踪技术,相比传统的PLL跟踪算法,NCO输出能够较快较稳地收敛,并大大减少了弱信号条件下的跟踪时间。
3 结束语
针对火星探测任务X频段深空应答机的高灵敏度接收处理要求,对应答机极低信噪比下的关键技术——载波捕获技术和高灵敏度跟踪技术进行了研究。首先,突破传统的单一的全频段频率扫描技术,提出了扫频+频域校正、时分复用的方法解决极低信噪比下载波捕获技术,并进行了仿真分析。其次,相比传统的PLL跟踪算法,设计了一种FLL+PLL结合的数字载波环路方法,并对2种方法进行了仿真比较分析。从仿真结果可以看出,本文提出的扫频+频域校正、时分复用的方法能够很好地解决极低信噪比下载波捕获技术,设计的FLL+PLL结合数字载波环跟踪技术可以大大减少深空应答机高灵敏度跟踪时间,对深空应答机的工程实现具有一定指导意义。
[1] SIMONM K,TKACENKO A.Noncoherent Data Transition Tracking Loops for Symbol Synchronization in Digital Communication Receivers[J].IEEE Trans.Commun.,2006,54(5):889-899.
[2] 饶启龙.深空测控通信技术研究[J].无线通信技术,2011,20(2):57-61.
[3] 石书济.深空探测与测控通信技术[J].电讯技术,2001(2):1-4.
[4] 卢满宏,周三文,谌明,等.深空测控通信技术专题研究[J].遥测遥控,2007(S1):11-16.
[5] 刘延利.深空应答机的新型数字化平台[D].北京:北京跟踪与通信技术研究所,2010:50-63.
[6] 樊耀林,李志强,吴学英.深空探测测控通信系统[J].数字通信世界,2010(5):86-90.
[7] HASKINS C B,MILLARD W P,JENSEN J R.Flexible,Coherent Digital Transceiver for Low Power Space Missions[C]∥In proc.2006 IEEE Aerosp.Conf.,2006:128-129.
[8] 陈凌.基于FFT的扩频信号载波频率捕获研究与实现[D].成都:西南交通大学,2004.
[9] 王伟伟.卫星通信中低信噪比高动态下载波同步研究[D].秦皇岛:燕山大学,2010.
[10] 魏苗苗.低信噪比大动态下的同步技术研究[D].北京:中国科学院国家空间科学中心,2016.
[11] 王千喜,李社军,王丹阳,等.高灵敏度接收机跟踪环路设计方案[J].现代电子技术,2013,36(11):89-91.
[12] 邓晓东,孙武.基于FLL+PLL的载波跟踪环路设计[J].现代防御技术,2010,38(4):137-141.
[13] 沈锋,徐定杰,薛冰.基于FLL/PLL相结合的载波跟踪在导航接收机中的应用[J].中国航海,2004(2):53-56.
[14] 曹志刚,钱亚生.现代通信原理[M].北京:清华大学出版社,1992.
[15] 韩孟飞,王永庆,吴嗣亮,等.极低信噪比高动态信号的载波跟踪锁频环鉴别器[J].北京理工大学学报,2009,29(3):245-249.
[16] COMPARINI M C,SIMONE L,MARCHETTI F,et al.Spacecraft Transponder for Deep Space Applications:Design and Performance[C]∥In Proceedings of Aerospace Conference,IEEE,2002(3):1337-1347.
[17] 曾富华.深空微弱高动态信号捕获与跟踪算法研究与实现[D].成都:电子科技大学,2008.
StudyonKeyTechnologiesofTransponderinExtremelyLowSNREnvironments
HAO Zhanjiong,LI Chunping,QIN Fen,HE Zhou
(ShanghaiAerospaceElectronicTechnologyInstitute,Shanghai201109,China)
Considering the high sensitivity receiving and processing requirements of X-band deep space transponder for Mars mission,the paper proposes a method of frequency sweep+frequency domain correction and time division multiplexing to realize carrier acquisition in extremely low SNR environments,and designs a digital carrier loop method to realize high sensitivity tracking.Under a signal intensity of -155 dBm,the acquisition algorithm and tracking algorithm are simulated,and the simulation results before and after algorithm improvement are compared and analyzed.The results show that the method improves the output SNR of FFT and reduces the acquisition time;under the condition of weak signal,using the FLL+PLL combined digital carrier loop tracking technology can greatly shorten the time of tracking.
deep space transponder;carrier acquisition;frequency-locked loop;phase-locked loop
2017-09-19
国家重大专项基金资助项目(MARS-1-H)
10.3969/j.issn.1003-3106.2018.01.15
郝占炯,李春萍,秦奋,等.极低信噪比下应答机的关键技术研究[J].无线电工程,2018,48(1):68-71.[HAO Zhanjiong,LI Chunping,QIN Fen,et al.Study on Key Technologies of Transponder in Extremely Low SNR Environments[J].Radio Engineering,2018,48(1):68-71.]
V443+.1
A
1003-3106(2018)01-0068-04

郝占炯男,(1982—),毕业于中国科学院上海微系统与信息技术研究所,硕士,高级工程师。主要研究方向:测控通信技术。
李春萍女,(1987—),硕士,工程师。主要研究方向:测控通信技术。
秦奋男,(1984—),硕士,高级工程师。主要研究方向:测控通信技术。
何舟男,(1989—),硕士,工程师。主要研究方向:测控通信技术。
猜你喜欢
河北工业大学学报(2021年4期)2021-09-23
航天器工程(2021年2期)2021-04-28
应用数学(2020年2期)2020-06-24
数学物理学报(2020年1期)2020-04-21
百科探秘·航空航天(2018年11期)2018-11-29
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
现代防御技术(2017年2期)2017-05-13
电子制作(2017年23期)2017-02-02
遥测遥控(2015年5期)2015-04-23