考虑履带滑动的履带车辆转向载荷比分析与验证
2018-12-29 06:36李荣利李善乐芮强王红岩陈冰
机械工程师 2018年1期
李荣利, 李善乐, 芮强, 王红岩, 陈冰
(1.63963部队,北京 100072;2.装甲兵工程学院 机械工程系,北京 100072)
考虑履带滑动的履带车辆转向载荷比分析与验证
李荣利1, 李善乐2, 芮强2, 王红岩2, 陈冰2
(1.63963部队,北京 100072;2.装甲兵工程学院 机械工程系,北京 100072)
为研究高速履带车辆稳态转向载荷比的变化规律,根据履带车辆转向过程中履带与地面之间的剪切应力-剪切位移关系,建立了稳态转向平衡方程和稳态转向载荷比模型。分析了履带车辆转向功率及整车转向载荷比随转向半径的变化规律,履带滑动对转向载荷比影响。最后对某高速履带车辆开展了稳态转向试验,进行数据处理和对比验证。结果表明:整车转向载荷比试验数据与理论计算结果有很好的一致性,验证了转向载荷比模型的准确性。
高速履带车辆;转向过程;载荷比;试验验证
0 引言
高速履带车辆转向性能是指其改变运动方向的能力,是评价履带车辆机动性能的重要指标之一[1]。履带车辆转向时,履带与地面之间产生滑移和滑转,两侧履带的牵引力和制动力与直驶工况相比大得多,转向时消耗的功率也是直驶消耗功率的若干倍[2-3]。为分析高速履带车辆转向时的功率增长情况,引入转向载荷比概念。然而目前研究采用的转向模型都过于简单,忽略了转向时履带滑移、滑转、离心力以及接地压力分布等因素的作用和影响[4-7]。
鉴于以上研究,笔者根据履带与地面之间的剪切应力-剪切位移关系,考虑转向过程中履带的滑移、滑转以及履带车辆转向离心力作用,建立稳态转向过程中转向载荷比模型,分析了转向载荷比随相对转向半径的变化规律。并通过高速履带车辆的稳态转向试验,验证了所提出的稳态转向载荷比模型的科学性和可信性。
1 履带车辆转向过程分析
履带车辆转向过程复杂,根据履带与地面之间的剪切作用,分析了履带车辆稳态转向关系,图1为履带车辆转向原理示意图[8-9]。其中:L为履带接地长;b为履带板宽度;B为履带中心距;CG为履带车辆质心;cx、cy为履带车辆质心到转向中心的横向距离和纵向距离;φ为航向角;φ˙为履带车辆转向角速度;D为转向极纵向偏移量;R为履带车辆稳态转向半径;XOY为惯性坐标系;IC为履带车辆在惯性坐标系上的转向中心;xoy为固结于车体坐标系。
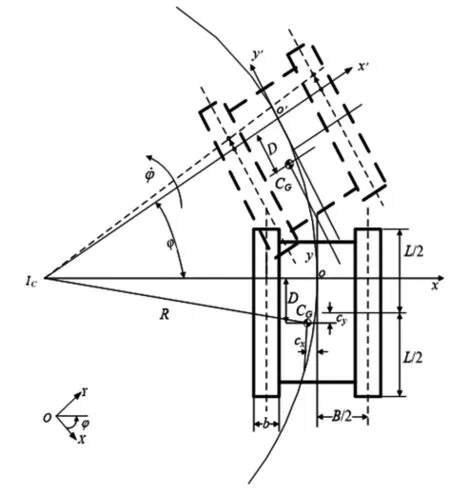
图1 履带车辆稳态转向原理图
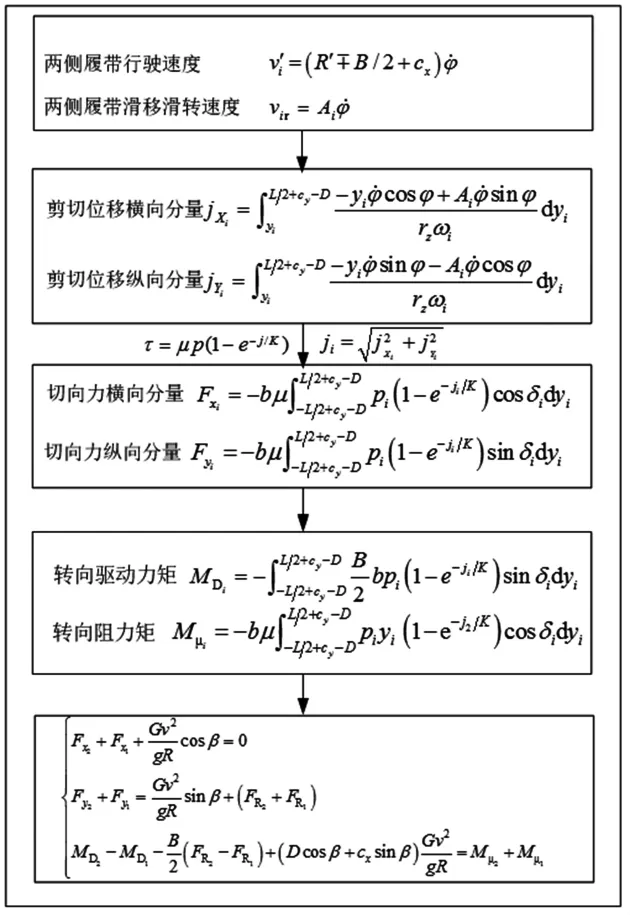
图2 履带车辆稳态转向模型分析框图
图2为履带车辆稳态转向模型分析框图[10],其中:G为履带车重;Ai为两侧履带转向极横向偏移量;vi为两侧履带理论速度;v为履带车转向速度;yi为两侧履带上任一点到固定坐标系的纵向距离;δi为两侧履带滑动速度和横向方向的夹角;β为侧滑角;pi为两侧履带接地压力;ji为两侧履带剪切位移;μ为摩擦因数;K为土壤抗剪切模量;FR1、FR2为两侧履带滚动阻力;下标i=1、2,分别表示低速侧和高速侧履带。根据履带与地面之间的剪切力-剪切位移关系计算两侧履带牵引力、制动力、转向阻力矩,并得到稳态转向平面运动学方程,通过对转向方程的迭代求解可以得出两侧履带转向极横向偏移量A1、A2以及转向极纵向偏移量D,进而求得转向过程中各运动学和动力学参数,为转向载荷比的分析奠定一定的基础。
2 高速履带车辆转向载荷比分析
2.1 转向功率及整车转向载荷比的建模
高速履带车辆直驶时消耗的功率表示如下:

式中:f为履带车辆行驶阻力系数;v0为直线行驶速度。
履带车辆稳态转向过程所消耗功率如下:
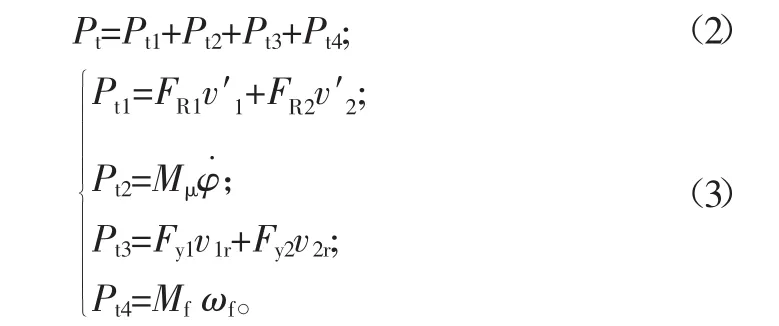
式中:Pt1为两侧履带纵向行驶阻力消耗功率;Pt2为履带车辆转向阻力矩消耗功率;Pt3为两侧履带与地面滑移、滑转消耗功率;Pt4为转向机构摩擦元件消耗功率;v1′、v2′分别是低速侧和高速侧履带行驶速度;Mμ为履带车转向阻力矩;v1r、v2r分别为两侧履带接地段滑动速度;Mf为转向机构摩擦元件的摩擦力矩;ωf为转向摩擦元件相对角速度。
假设履带车辆按规定半径转向,不考虑转向机构摩擦损耗功率,令vc为履带车辆质心行驶速度。根据转向载荷比定义可知整车载荷比ζ可表达如下:
2.2 转向消耗功率及整车转向载荷比分析
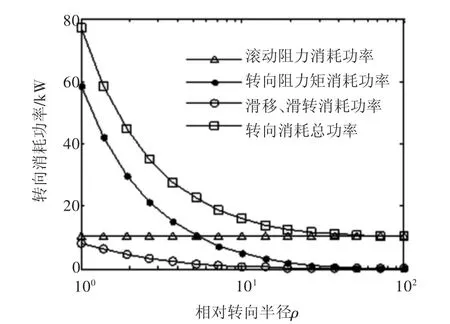
图3 履带车辆转向消耗功率随ρ的变化关系
履带车辆转向消耗总功率Pt以及各部分功率消耗随相对转向半径的变化曲线如图3所示,从图3中可以得出:随着相对转向半径的增大,转向阻力矩和滑移、滑转所消耗功率逐渐变小,并且整体上履带滑移、滑转所消耗的功率较小;当相对转向半径在1~10时,转向阻力矩消耗的功率相对较大;当相对转向半径大于10时,滚动阻力消耗功率相对较大。
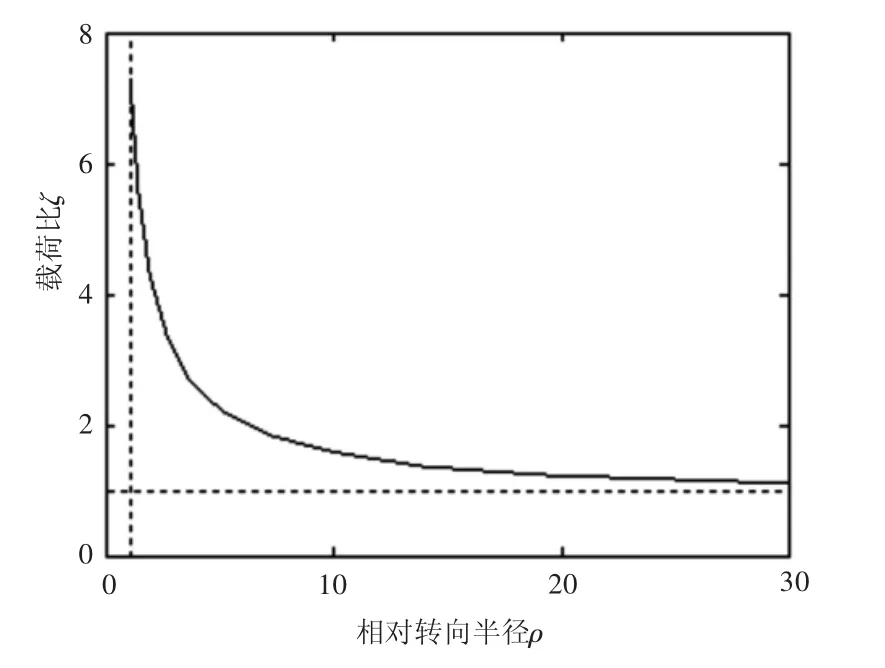
图4 整车转向载荷比与相对转向半径的关系曲线
图4是某安装差速式转向机构履带车辆稳态转向时转向载荷比与相对转向半径的关系曲线。从图中可以看出:整车转向载荷比大小随着相对转向半径增大逐渐减小;并且当相对转向半径为1~10时,整车载荷比值在1.7~7.0之间,即转向过程需要的功率是直线行驶需要功率的1.7~7倍左右,转向半径越小,需要消耗功率越大;当相对转向半径大于10时,整车转向载荷比值在1.0~1.7之间。
2.3 履带滑动对转向载荷比影响
高速履带车辆在转向过程中,不可避免地发生两侧履带的滑移、滑转。与理论转向情况相比,考虑履带滑移、滑转时,两侧履带产生的牵引力和制动力都相对偏小,转向阻力矩也偏小。因此,当相对转向半径相同时,考虑履带滑移、滑转时转向消耗功率小于理论转向条件下转向消耗的功率,也就是说基于传统理论的转向功率要大,这对于基于此设计出的转向回路的动力源或转向泵马达功率需求要保守一些,且相对转向半径越小履带滑移、滑转越严重,转向载荷比的差异也越大。
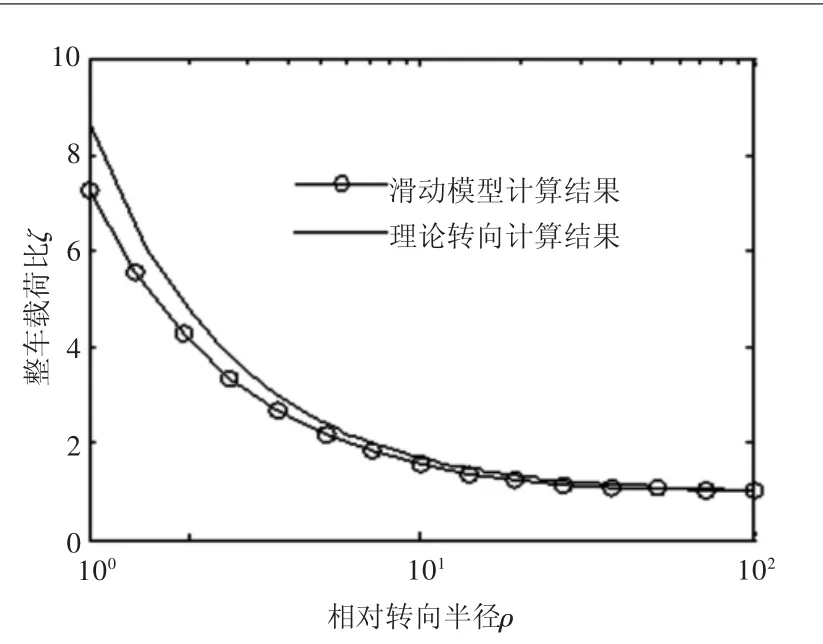
图5 整车载荷比模型计算结果与理论转向结果对比
图5为整车转向载荷比在理论转向时和考虑履带滑移、滑转时计算结果,从图中可以得出:考虑两侧履带滑移、滑转情况下得到的整车转向载荷比与理论转向的计算结果相比偏小。
3 转向试验与转向载荷比验证
实车试验是验证计算模型的重要技术手段。因此进行高速履带车辆转向试验十分必要。本文选择了针对计算分析的结果对某型履带转向过程进行了试验分析。
3.1 转向过程试验
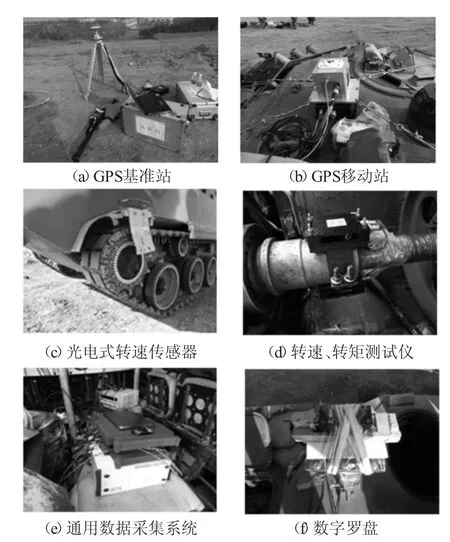
图6 稳态转向试验部分设备
试验履带车辆在沙土路面进行稳态转向测试,图6为转向试验部分设备,其中高精度GPS系统包括:GPS基准站和GPS移动站。GPS基准站位于能够与履带车通视的地方,接收移动站发过来的信号并记录下来,如图6(a);GPS移动站固定在试验车辆上,随车体运动,并记录车体所在位置经纬度坐标、车速等,如图6(b);NI测试系统包括:光电式转速传感器、转速和转矩测试仪、通用数据采集系统。其中光电式转速传感器测量两侧主动轮转速,如图6(c);转速和转矩测试仪测量综合传动装置两侧输出轴的转速和转矩,如图6(d);数据采集系统收集传感器电信号并进行初步处理,如图6(e);图6(f)为数字罗盘,数字罗盘固定在车体上随车体进行转向运动,将GPS系统数据和NI测试系统的数据同步。
表1为不同相对转向半径下得到的试验数据,从表中可以看出:随着实际相对转向半径的增大,牵引力、制动力、转向阻力矩以及转向载荷比逐渐减小;相对转向半径较小时,高速侧履带转向载荷比值较大,在8.80~16.51之间,低速侧履带载荷比值相对较小;试验测试过程中整车载荷比在1.47~4.33之间变化。
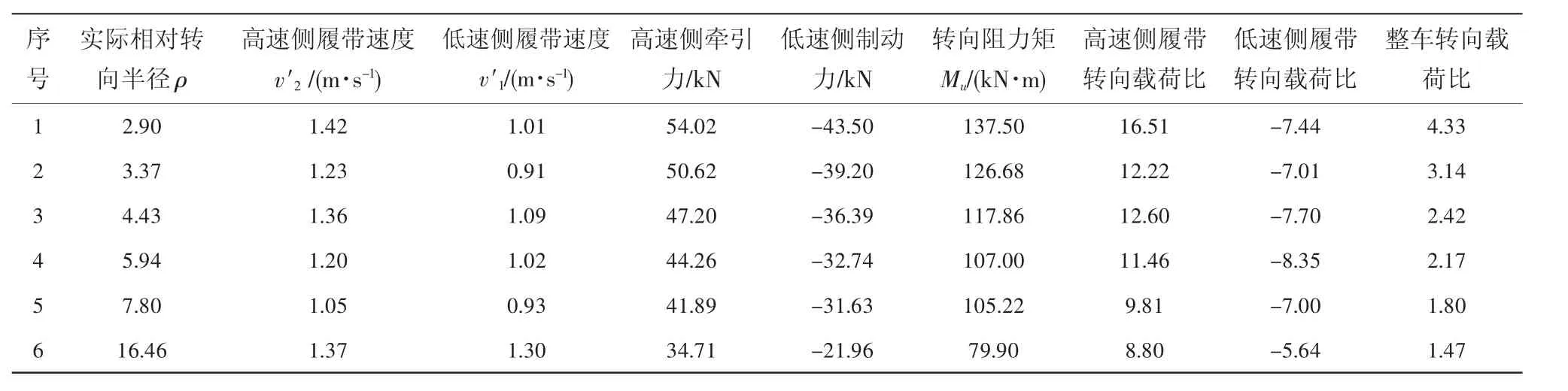
表1 履带车辆转向试验数据结果
3.2 转向载荷比计算结果与试验结果的对比
图7为整车转向载荷比计算结果与试验测试结果对比。从图中可知:试验测试结果集中分布在转向载荷比计算曲线附近,并且两者有一致的变化趋势,验证了转向载荷比计算结果的科学性和可信性。
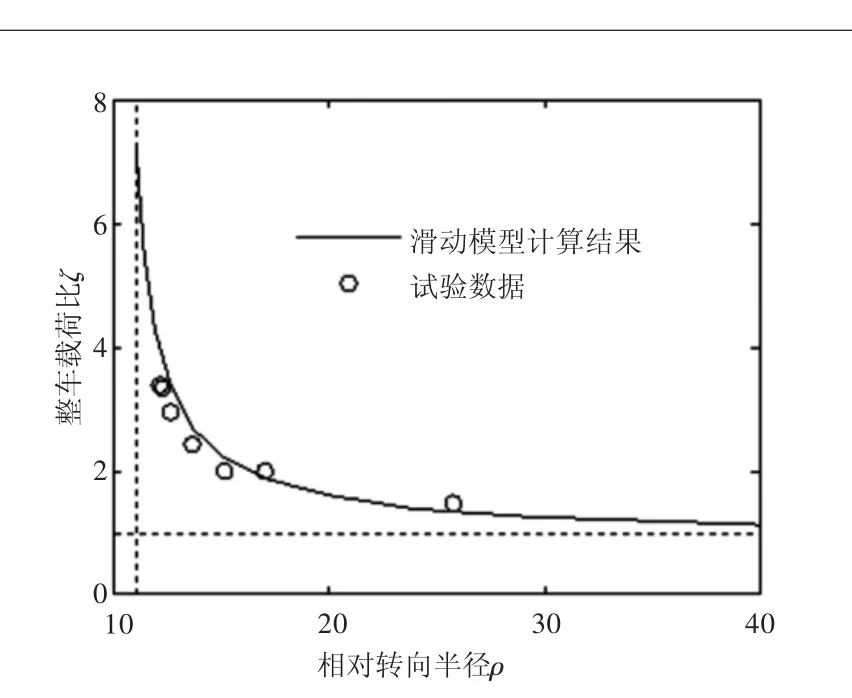
图7 整车转向载荷比随相对转向半径的变化关系
4 结论
本文根据高速履带车辆与地面之间的剪切应力-剪切位移关系,建立了转向载荷比模型,分析了履带转向功率以及整车转向载荷比变化规律,并通过实车试验进行了验证,得出结论如下:
1)根据对履带车辆转向功率及转向载荷比的分析,当相对转向半径为1~5时转向阻力矩消耗功率占总消耗功率比例达到60%以上;整车转向载荷比的变化范围在1.0~7.0之间。
2)考虑履带滑动时,履带车辆整车转向载荷比比不考虑履带滑动时整车转向载荷比要小。
3)试验结果基本分布在计算结果两侧,两者有一致的变化趋势,验证了所建立的稳态转向过程中载荷比模型的科学性。
[1] 闫清东,张连第,赵毓芹,等.坦克构造与设计[M].北京:北京理工大学出版社,2007:211-221.
[2] 迟媛,蒋恩臣.履带车辆差速式转向机构性能试验[J].农业机械学报,2008,39(7):14-17.
[3] 曹付义,周志立.液压机械双功率差速式转向机构的转向性能分析[J].工程机械,2004,35(2):36-39.
[4] MACCLAURIN B.A Skid Steering Model with Track Pad Flexibility[J].Journal of Terramechanics,2007,44(1):95-110.
[5] MACLAURIN B.A Skid Steering Model Using the Magic Formula.[J].Journal of Terramechanics.2011,48(4):247-263.
[6] 迟媛,蒋恩臣.差速转向履带车辆的载荷比试验[J].农业机械学报,2008,39(8):44-47.
[7] 迟媛.动力差速转向机构履带车辆载荷比与转向系数的关系[J]..农业工程学报,2012,28(18):44-48.
[8] 王红岩,王钦龙,芮强,等.高速履带车辆转向过程分析与试验验证[J].机械工程学报,2014,50(16):162-172.
[9] 芮强,王红岩,王钦龙,等.基于剪切应力模型的履带车辆转向力矩分析与试验[J].兵工学报,2015,36(6):968-997.
[10] 李善乐,王红岩,芮强,等.履带车辆转向过程载荷的统计分析[J].装甲兵工程学院学报,2015,29(4):40-45.
Verification and Analysis on Steering Power Ratio of Tracked Vehicle within Track Slid Taking into Consideration
LI Rongli1, LI Shanle2, RUI Qiang2, WANG Hongyan2, CHEN Bing2
(1.Troop NO.63963 ofPLA,Beijing100072,China;2.Department ofMechanical Engineering,Academyof Armored Force Engineering,Beijing100072,China)
In order to study the change of steady-state steering power ratio of high-speed tracked vehicle,the equations are established and solved by iterative algorithm according to the relationship between shear stress and shear displacement;the model of steady-state steering power ratio is established as well.The relationships between power ratio of the whole vehicle,steering power and steering radius are analyzed,and the skidding influence of the track on the power ratio is analyzed.Finally experiment of steady-state steering is carried out.Test data and the theoretic calculated results are compared,and the result shows that they fit well,which proves the accuracy of model of steering power ratio.
high-speed tracked vehicle;steering process;power ratio;experiment validness
TJ 811
A
1002-2333(2018)01-0092-04
(编辑黄 荻)
李荣利(1964—),男,硕士,高级工程师,从事试验测试与鉴定工作。
2017-02-28
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
兵器装备工程学报(2021年3期)2021-04-09
中华戏曲(2020年1期)2020-02-12
石油化工建设(2019年6期)2020-01-16
现代农机(2018年1期)2018-02-11
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20