基于蓝牙的生命探测机器人控制系统设计
2019-01-03 02:32,
机电元件 2018年6期
,
(江苏信息职业技术学院机电工程学院,江苏无锡,214153)
1 引言
目前,人类社会处于和平年代,人们的生命财产安全得到了极大的保障,但是有时发生的地震,矿难,火灾等灾害时,搜救人员无法直接进入,常常用其他搜救工具代替人们进入废墟或者灾难现场,帮助外面人员了解内部情况。随着蓝牙技术的日趋成熟,作为一种稳定的数字无线电技术,蓝牙在工程上得到了广泛应用 。
该系统完成了一个基于蓝牙的生命探测机器人设计,主要功能是用移动手机端App为控制平台,控制小车的运动,包括前进、后退、左转、右转、加速、减速,以及探测物体的移动;该控制系统四轮小车为载体,以蓝牙为通讯方式,以HC-SR501人体红外感应模块为感知单元,以Android端App为控制平台。因为以上芯片成本低、电路简单,运行可靠,实现了以低成本完成高要求的智能化设备控制要求 。
2 系统概述
生命探测机器人以STM32F103C8T6单片机 为核心,系统具有红外探测,煤气检测,一氧化碳检测,烟雾检测,湿度检测,温度检测,电机驱动,显示参数功能。
1)当发现附近有动物时,红外检测单元检测到后,单片机会输出会红灯闪烁,表示周围有生命迹象,传给手机APP并进行显示。
2)湿度传感器检测事故现场的湿度情况,传给手机APP并进行显示。
3)如果温度过高时,把温度信息传给手机APP并进行显示,蓝灯闪烁。
4)当室内可燃性气体煤气等超过一定的标准时,红灯长亮同时报警器也会响起来提醒危险的存在,防止煤气中毒或火灾事故的发生,,传给手机APP并进行显示。
3 系统硬件设计
机器人的硬件电路由电源电路、控制器电路、电机驱动电路、传感器接口电路,以及通信模块电路组成。
电源部分使用7.2V可充电电池提供电能,然后对输入的7.2V电压进行稳压并转换为5V给蓝牙模块,电机驱动模块、红外人体检测模块供电,然后再将5V进行稳压并转化为3.3V给单片机供电。电源部分是整个硬件系统的关键,它的稳定性直接决定机器人的可靠性。系统需要用到7.2V、5V、3.3V,所以需要对电池电压进行转换稳压,常用的稳压芯片有LM系列、1117系列。这里使用LM7805稳定5V电压、AMS1117-3.3稳定3.3V电压。
控制器电路主要包括:芯片电源电路、时钟电路、复位电路等,如图1所示。
电机驱动使用L298N直流电机驱动芯片,它可以同时驱动两个直流电机或者一个步进电机,每路最大输出2A电流。采用电机驱动电源和逻辑控制电源分开的供电方法,使用7.2V给电机供电,使用5V作为逻辑电源输入。系统选择车轮式机械结构,如图2所示。车轮式机器人有四个车轮,每个车轮由一个直流电机驱动。直流电机具有转矩大、转速易调节等优点,使得车轮式机器人具有强机动性和高负载能力。

图1 STM32整体电路

图2 四轮车模
传感器HC-SR501模块,如图3所示,使用5V供电,当模块检测到有人时,输出端会输出一个高电平,通过单片机的IO引脚来读取输出端电压即可感知周围环境是否有人。气敏元件MQ-2检测煤气等可燃性气体烟雾。
HC-SR501使用的是双元探头,探头的窗口为长方形,双元(A 元B 元)位于较长方向的两端,当人从左到右或从右到左走过时,红外光谱到达双元的时间、距离有差值,差值越大,感应越大。HC-SR501模块。它具有三个接线端,一个VCC,一个GND,一个信号输出端。当有人体靠近时,信号输出端输出高电平,并保持大概3s钟,如果没有人靠近时,信号输出端则输出低电平。单片机通过检测信号输出端的电平就可以知道小车周围是否有人,因为如果有人,它肯定会有轻微的运动,此时传感器就可以检测出这种微小的运动。

图3 HC-SR501人体红外检测模块
蓝牙模块蓝牙通信具有成本低、功耗低、传输速率高、抗干扰能力强等特点 ,使用3.3-6V电源供电,为了保证模块的稳定性,系统使用5V电源为蓝牙模块供电。系统使用的蓝牙模块为HC-05,它具有4个端口,一个VCC,一个GND,一个RX,用于接收串口数据、一个TX,用于发送串口数据。
4 系统软件设计
4.1 程序概况
程序部分是搜救机器人系统的灵魂,硬件部分只是作为程序的载体。系统设计的机器人软件部分主要包括:电机驱动程序、蓝牙通信程序、传感器检测程序以及APP上位机程序 。
电机驱动程序主要是控制PWM波的输出,直流电机通过L298N模块驱动,通过给该模块信号硬件不同占空比的脉冲就可以实现直流电机的调速。系统只需要使用4路PWM波。
蓝牙通信程序 主要是编写串口通信程序,由于模块以及将底层的蓝牙协议封装好了,用户只需把它当作一个无线串口来使用就可以。STM32具有丰富的串口资源,有3个USART。系统使用USART1。
传感器检测程序检测HC-SR501传感器输出脚的高电平信号,只需将单片机的一个IO口配置为下拉输入,然后循环读取该IO口的状态即可检测是否有人。
当传感器输出高电平时,说明周围环境有人,此时需要点亮板载LED指示灯,并向上位机发送有人指令,若输出为低电平,则向上位机发送无人指令,然后返回到第二步,依次类推,不断循环。生命探测流程图如图4所示。
传感器输出的是数字信号,即只有高低电平之分,为了使读取的数据更加稳定,减小误判,需要将单片机硬件配置为下拉输入。即当外部没有输入信号时,读取单片机硬件为低电平,当外部输入高电平时,此时读取单片机硬件为高电平。
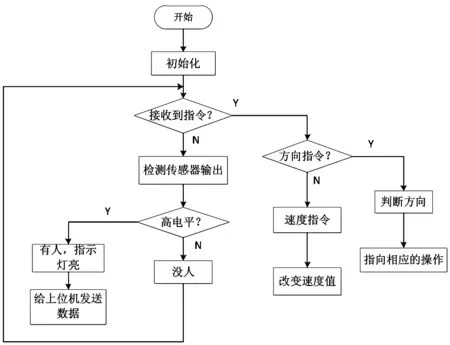
图4 生命探测流程图
4.2 电机驱动程序
电机驱动程序完成的是PWM波的产生,以及PWM波占空比的调节。STM32具有多个TIM定时器,除了最高定时器之外,其它都可以输出PWM波,系统选用TIM3,TIM3定时器一共产生4路PWM,正好满足要求。
4.3 蓝牙通信程序
蓝牙通信程序主要是编写串口通信程序。STM32具有丰富的串口资源,系统使用的STM32F103C8T6具有三个串口,但系统只用到了一个串口。
4.4 传感器检测程序
传感器检测程序:首先,生命探测传感器信号通过单片机IO引脚电平读取程序来判断,高电平表示有生命迹象,低电平表示没有生命迹象。其次温度检测传感器检测出温度传给手机App直接显示,当超过设定值,蓝灯闪烁报警。湿度传感器检测现场的湿度情况,传给手机App并进行显示。气敏传感器检测出可燃性气体,传给手机App,如果超限,红灯长亮并且报警器响起来报警 。
4.5 App上位机程序
在生命探测的过程中,外部人员需要控制机器人的前进、回退、转弯、速度等,以及监测废墟里的各种情况,这就需要一个控制平台。该控制平台有两个作用:一个是操作人员用于控制机器人,二是机器人将传感器的数据通过无线的方式传给外面的人员,让搜救人员了解废墟内部的情况,以及时的制定搜救计划,缩短搜救时间。移动手机端上位机,即基于手机平台开发一款上位机软件,每个人都会随身携带一部手机,这样就不用额外再携带一个控制设备了。可以减小制作成本,方便使用。
5 结束语
本次设计已经完成对生命探测机器人的控制功能实现,完全可以作为一套简易系统投入使用,可以进行生命探测,温度检测、湿度检测,煤气等可燃性气体烟雾检测,各种功能于一体,成为人类的好助手,为生命护航。
猜你喜欢
工业设计(2022年7期)2022-08-12
山西电子技术(2022年1期)2022-02-28
装备制造技术(2020年11期)2021-01-26
科技传播(2019年15期)2019-08-22
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22