
集装箱码头堆场自动化分散作业安全管理措施
2019-01-03 02:05孙元一
集装箱化 2019年11期
孙元一
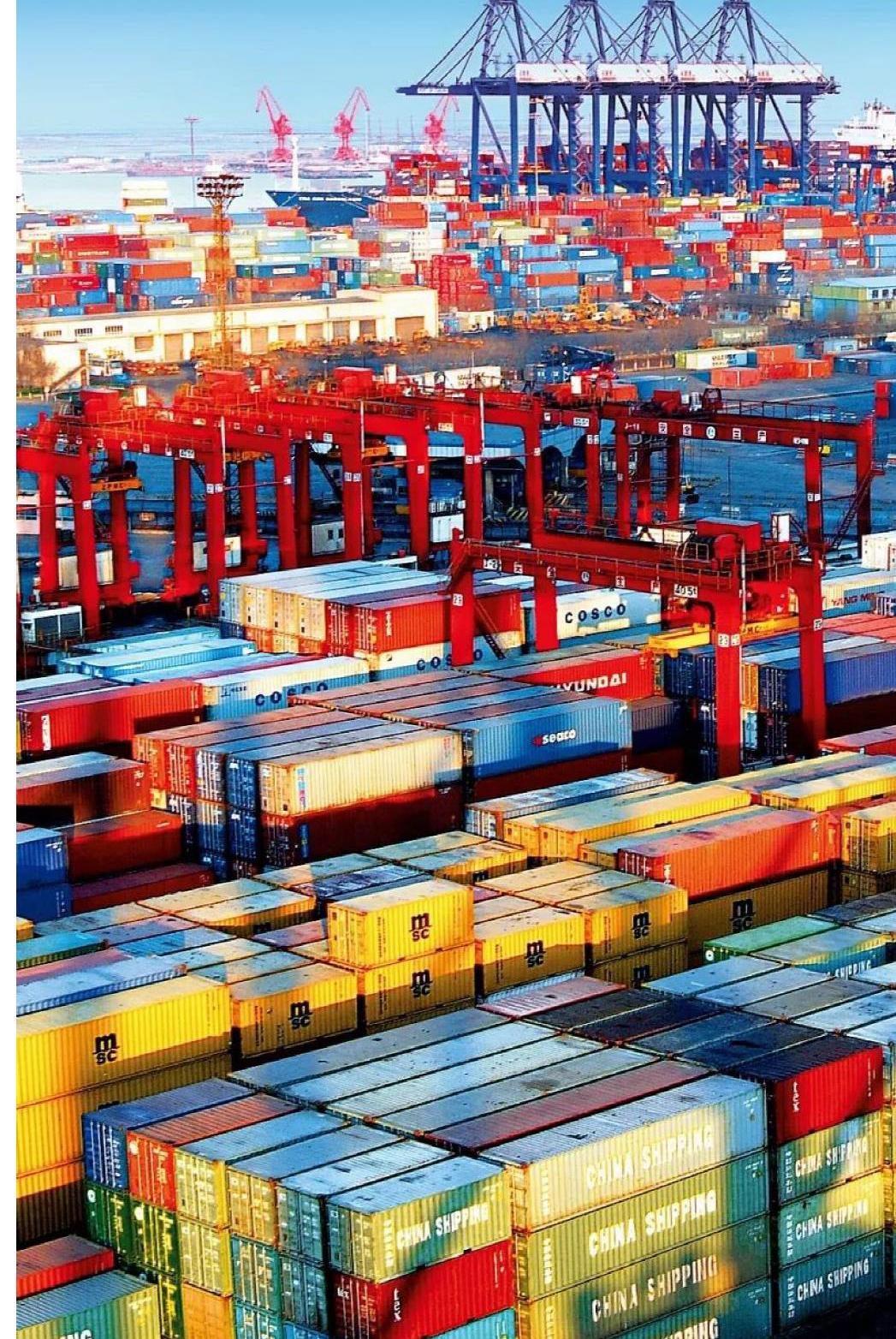

随着智能化技术日益成熟,自动化集装箱码头改造和建设成为趋势。在集装箱码头自动化作业的情况下,安全管理如何与生产自动化、智能化配合,形成全方位生产防护和监控至关重要。天津港集装箱码头有限公司(以下简称“天津港集装箱码头”)成立于2005年11月,由煤码头改建而成,位于天津港北疆港区最东侧,其基本情况如下:码头岸线全长1 202 m,前沿水深15.7 m,拥有4个可接卸第六代以上全集装箱船的专业化集装箱泊位;码头堆场平行于岸线布置,面积达35万m2,配备可双箱作业的集装箱岸桥(外伸距66 m,起升能力65 t)12台,可堆码6层,并配备起升能力达61 t的轨道吊31台;年设计集装箱吞吐能力为150万TEU ,是我国第一个全部采用定轨式场地设备作业工艺的专业智能化集装箱码头。在全国港口积极响应国家智能化港口建设号召的大环境下,轨道吊自动化改造技术日趋成熟。为了缓解企业成本压力,突破企业发展瓶颈,落实天津港“智慧港口”建设三年行动计划,天津港集装箱码头实施堆场自动化升级改造,从而给码头堆场安全管理方式带来变革。本文基于集装箱码头堆场自动化分散作业工艺,提出自动化堆场安全管理措施,在智能化集装箱码头安全防护方面具有一定借鉴意义。
1 集装箱码头堆场自动化分散作业安全
隐患
为了充分发挥自动化堆场的整体效能,天津港集装箱码头通过充分的数据分析和有针对性的问题测试,最终决定采用全场分散作业工艺来配合堆场自动化升级改造。自动化分散作业工艺突破传统策划模式下以“贝”为最小进场单元的策划方式,改为以“单列”为最小进场单元的策划方式,使堆场资源利用更均匀且效率更高。在堆场范围一定的情况下,自动化分散作业工艺有利于提高堆场周转率和承载力;不过,该作业工艺的分列堆存方式存在无法智能计算翻箱位置的缺点以及单列高箱堆存的安全隐患。
2 集装箱码头堆场自动化分散作业相关安全技术
2.1 三维激光扫描技术:防“打保龄”
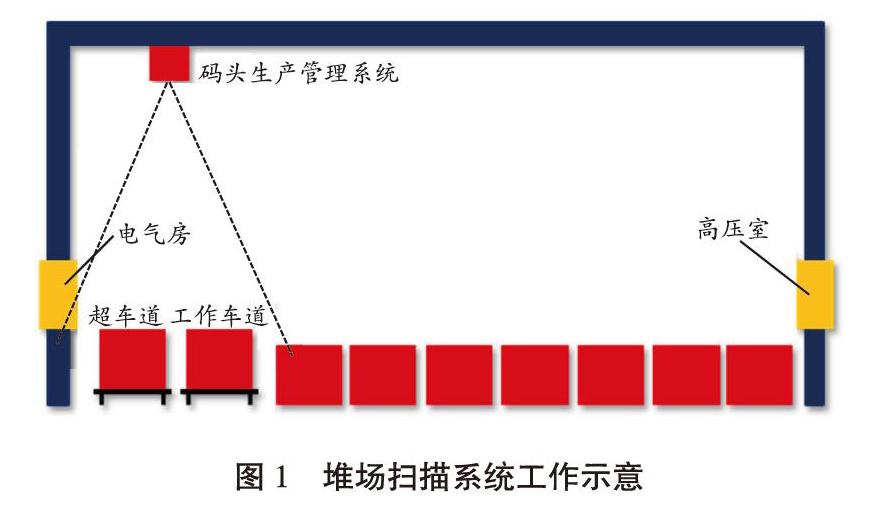
堆场扫描系统(见图1)通过安装在小车架平台上的三维激光扫描仪(见图2)持续扫描自动化轨道吊下方的集装箱及集卡轮廓。系统可自动识别各种箱型,包括45英尺集装箱、40英尺集装箱、单20英尺集装箱、双20英尺集装箱等,并能掃描集装箱的高度、宽度和间距。系统通过对比扫描信息与码头生产管理系统箱区信息,校验其一致性,并通过确认后的集装箱轮廓来计算集装箱防碰撞距离,以便控制小车减速和停车。另外,系统根据三维激光扫描仪读取的集装箱轮廓信息定位目标,计算最优路线,引导吊具停在待装集装箱位置或集卡正上方,并控制吊具下降至安全高度,提示远程操作员进入手动作业状态。
2.2 目标定位系统和负载定位系统:防止堆码不齐
目标定位系统将激光传感器和控制器集于一体,具有扫描速度快、精度高等优点,能在小车和大车机构高速运行的过程中消除干扰因素,实现对目标物的精确扫描。负载定位系统检测吊具在大车和小车方向的偏差位置和实际扭转角度,用于实现对吊具位置控制的闭环反馈和箱区目标位置集装箱的轮廓扫描及平面扫描,以及箱型确认、箱区轮廓扫描、箱区贝位间距和排间距测量等功能,且吊具着箱精度为2 cm,满足自动化堆场对堆码质量的高要求。
2.3 生产作业组织:空箱与重箱分离
自动化轨道吊改造完成后,在实施自动化堆场分散作业工艺的过程中,天津港集装箱码头北区在生产组织上遵循空箱不进堆场的基本规则,确保空箱与重箱作业分离。
2.4 3D Viewer箱位显示系统:确保箱区堆码高度安全
充分利用现有智能设备资源,采用3D Viewer箱位显示系统,调整显示模式为层高显示,并利用颜色区分不同高度,使箱区堆码高度安全监控更加实时、立体。3D Viewer箱位显示系统工作台如图3所示,3D Viewer箱位显示系统界面如图4所示。
3 集装箱码头堆场自动化分散作业安全管理措施
3.1 建立人员问责机制
设立专职人员负责自动化堆场作业安全监控,由其巡查箱区的单列高、设备故障、设备定位等问题,并及时通知技术部门校准、维修。
3.2 建立安全预警机制
严格执行预警信息相关要求,针对隐患点采取相应安全预警措施,并制定相应应急措施,启动全场落高机制,提升应急反应能力。
(1)平整场地。重新浇筑自动化堆场的堆箱条基,使其完全平整,并及时维护。
(2)空箱不进自动化堆场。考虑到单列空箱的抗风性较差,在进行堆场策划时,不安排空箱进入自动化堆场。
(3)大风预警时提前落高。在接到大风预警信息后,安排专岗人员统筹组织单列箱落高作业。
(4)制定专门规定,指导单列箱落高作业。
(5)严格执行防风预警要求,强化监督和指导。
(6)协调系统供应商,优化堆码逻辑,努力实现并排多列策划功能,消除手动翻箱指令的缺陷。
3.3 制定非生产性进出自动化堆场管理规定
3.3.1 进出场申请流程
进出场需求部门至少提前1 d向操作部场地计划员提出进出场申请。对于大型场地维护和耗时较长的设备改造维保等项目,至少提前3~5 d提出申请,以便预留充足的准备时间,并以班次、连续作业时段、连续作业区域和人员进出场频次为基准进行拆解,分别单独申请进出场。
3.3.2 进出场项目计划编制
根据相关申请,编制进出场项目计划,并在昼夜作业计划表中单独列明。进出场项目计划中需要注明的信息包括进出场需求部门、进出场项目内容、计划作业时段、作业区域、限制操作的场区贝位、到位前全场设备暂停需求、进出场人数、现场作业负责人(即安全负责人)等。与此同时,场地计划员作相应安排,以便为进出场项目实施创造场地工况条件。
3.3.3 进出场区域划分安全管理规范
操作部调度班组分管场地设备的中控员(以下简称“中控员”)负责进出场项目与生产作业之间的协调管理工作。按照昼夜作业计划的要求,由进出场需求部门具体执行进出场项目的现场作业负责人预先与中控员联系,确认进出场项目的诸项要素,包括项目内容、计划作业时段、作业区域、限制操作的场区贝位、到位前全场设备暂停需求、进出场人数、现场作业负责人(即安全负责人)等。
3.3.4 进出场设备系统管理规范
中控员预先在码头生产管理系统中划设临时性的禁止作业区域,指挥远程操控班长(以下简称“远控班长”)通过远程操控台在自动化设备管理系统中划设临时性的禁止作业区域;然后,双方交叉检查。中控员指挥远控班长手动将相关设备运行到指定区域,并在各系统执行脱离系统(离线)操作。中控员指挥远控班长暂停运行需求场地内的自动化轨道吊,以保证现场人员在进场后和到达指定作业区域前的安全。如果预计进场后至到位前的这段时间较长(10 min以上),中控员还应在码头生产管理系统中进一步拓展划设临时性的禁止作业区域,以暂时停止向该区域派发作业指令。现场作业负责人向中控员报告已就位状态,中控员解锁临时性的禁止作业区域,指挥远控班长恢复运行自动化轨道吊。在此过程中,注意不要误解锁限制操作的场区贝位或误恢复已离线的自动化轨道吊。
3.3.5 进出场门禁系统管理规范
中控员联系进出场项目现场作业负责人,要求进场人员无论是否需要进入自动化堆箱区,均须遵守门禁系统管理规范。原则上,进出场人员人手一张门禁卡,需要进入自动化堆箱区的人员刷卡并经中控员确认后开门,不需要进入自动化堆箱区的人员刷卡后在中控员允许的条件下方可进入场地。所有人员进入场地后,应尽快到达指定作业区域,布置隔离网,严格限定在区域内活动,人与工属具均严禁出区。隔离网应严格布置在作业区域内。全部人员进入自动化堆箱区后,应立即锁闭入口。在进出场项目实施期间,需要临时进入场地的项目施工人员均须按照上述流程执行进场操作;需要临时离场的人员须按照“提出申请→锁场和锁设备→联系离场→刷门禁卡→确认离场→恢复场地和设备→登记”流程操作。
3.3.6 离场管理规范
进出场项目完成后,现场作业负责人与中控员联系,按照“提出申请→锁场和锁设备→联系离场→刷门禁卡→确认离场→恢复场地和设备→登记”流程操作。所有工属具一并带离,并拆除临时隔离网带出,不得有任何遗漏。现场作业负责人确认离场后,中控员指挥远控班长解锁限制操作的场区贝位和恢复离线的自动化轨道吊,并登记相关信息。
3.3.7 进出场其他相关安全规范
若进出场项目需要跨班次作业,现场人员在换班前须全体履行离场流程并全部离场,接班后须全体履行进场流程后方可继续作业。操作部各班组严禁跨班次交接进出场项目,但须交接未完成的进出场项目的延续锁场情况或延续停机情况。除中控员外,禁止任何人使用场地锁定和解锁功能。除得到中控员的指示外,禁止远控班长或远程操控员使用自动化设备管理系统中的场地锁定和解锁功能,并禁止擅自啟动或暂停运行自动化轨道吊。
计划外的临时项目可由进出场需求部门向操作部当值班经理提出临时申请,当值班经理在遵循进出场项目计划原则和要求的基础上,可根据实际情况予以安排,并在履行上述有关流程后具体实施。相关申请应补发操作部场地计划员。若遇特殊紧急情况,由操作部当班组织实施的进出场项目可免去申请环节,但仍须执行后续有关流程,并向操作部场地计划员通报。场地计划员每天定时从中控员处收取进出场项目登记表,根据项目完成情况更新场地使用计划,并将登记表存档。
(编辑:曹莉琼 收稿日期:2019-09-20)
猜你喜欢
阅读(快乐英语高年级)(2021年11期)2021-03-08
集装箱化(2016年11期)2017-03-29
小星星·阅读100分(高年级)(2017年2期)2017-02-24
作文与考试·小学高年级版(2016年7期)2016-05-14
少儿科学周刊·儿童版(2015年6期)2015-11-24
三月三(2015年11期)2015-11-16
儿童故事画报(2015年3期)2015-05-25
儿童故事画报(2015年1期)2015-05-25
集装箱化(2014年12期)2015-01-06
集装箱化(2014年12期)2015-01-06
