
基于多方向混合模板的红外弱小目标检测算法
2019-01-14 06:13,,,,
空天防御 2019年1期
,,,,
(上海机电工程研究所, 上海 201109)
0 引 言
近几年,我国武器系统在不断地发展。其中,成像系统也被越来越广泛地应用于现代武器系统中。由于现代武器具有体积小、速度快、隐身性能好、破环力强等特点,能否尽早地检测到目标并进行跟踪对现代战争的结果起决定性作用。相比于其它的制导技术,如电视制导、毫米波雷达制导等,红外成像制导技术[1-2]具有以下较为明显的优点:①作用距离远,灵敏度高,具有较强的在复杂背景条件下捕获和跟踪目标的能力;②作为一种被动制导技术,具有较好的隐蔽特性。基于以上优点,红外成像制导技术已经广泛地应用于先进的精确制导武器系统中。
虽然红外成像制导系统有以上优点,但当目标距离探测器很远时,目标在红外图像中所占据的像素很少,一般小于100个像素,极端情况下甚至只有1个像素,呈现出一个微弱的点状小目标;图像信噪比较低,难以提供有效的特征信息,如形状、纹理、尺寸等,再加上背景中存在各种杂波,因此不利于计算机对目标进行检测和识别。
类似上述强度较弱、尺度很小,并且缺少如几何、纹理、边缘等特征信息的目标就称为红外弱小目标[3-4]。在红外成像制导系统中,如何对红外弱小目标进行准确的检测和识别是一个研究重点。高效的红外成像制导系统必须配备准确、高效的红外弱小目标检测装置,才能提高导弹及早发现并追踪红外弱小目标的能力。正是由于在复杂背景中对弱小目标的检测和跟踪难度很大,红外图像中的弱小目标检测技术一直是武器系统研究领域内的热点课题。本文的研究重点主要是红外弱小目标的检测问题。
1 图像灰度特征分析
首先对图像进行灰度变换,然后观察灰度图像,可以发现,图像大致可以分为5种不同类型的区域图像,分别标记为1~5。这些区域图像依次代表了图像中的净空区域、云中区域、云边缘区域、目标区域和云碎片区域,如图1所示。随后,用计算机对这5种不同的区域分别绘出相对应的三维灰度分布图。表1代表这些区域相应的灰度分布图。

图1 各区域位置 Fig.1 Location of each region
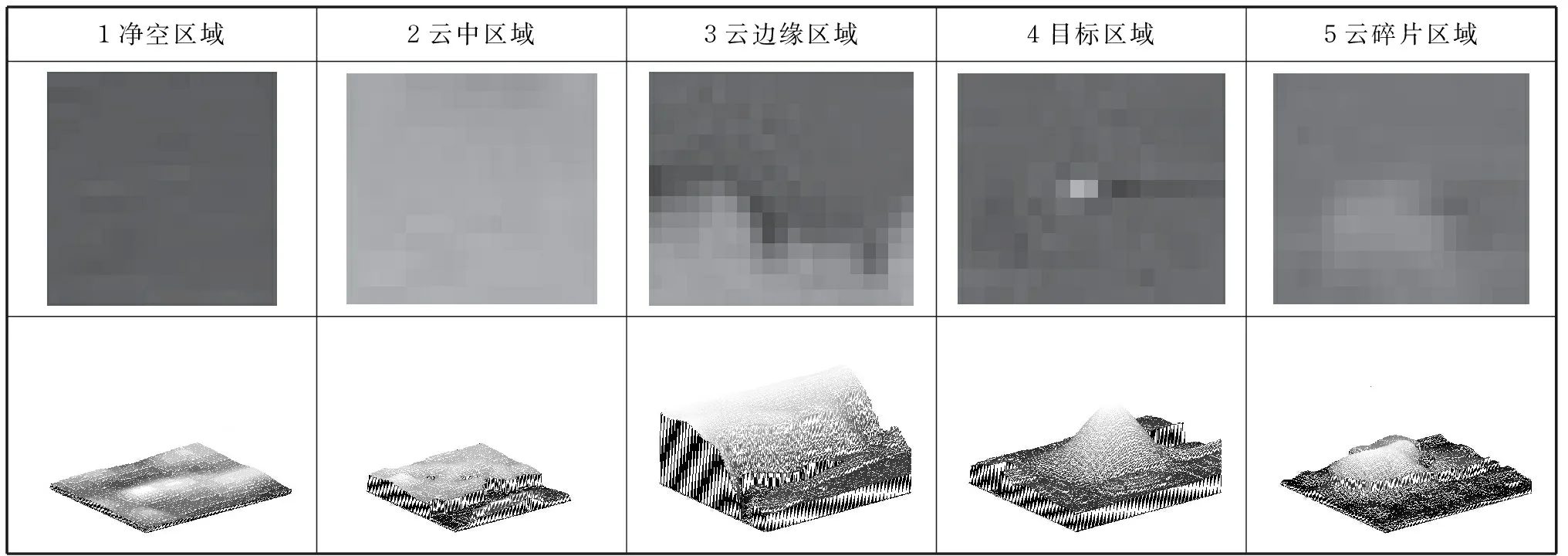
1净空区域2云中区域3云边缘区域4目标区域5云碎片区域
通过图1和表1,可以发现:净空区域和云中区域的灰度分布图较为平滑,且云中区域的平均灰度值要比净空区域的平均灰度值高出许多;云边缘区域的灰度分布呈现阶跃式增长态势;目标区域的灰度分布图显示出中间灰度高而边缘灰度低的特点,与云碎片区域的灰度分布特点较为相似,但目标区域的平均灰度值要高于云碎片区域的灰度值。由此可知,目标区域与净空区域、云中区域的灰度分布图的差别较为明显,而与云边缘区域及云碎片区域的灰度分布相近,因此,在检测目标区域时易受到后两个区域的干扰。然而,通过进一步分析可以发现,由于云边缘区域的灰度分布相较于目标区域带有明显的阶跃特性,因此,可以采用带有方向性的模板对其进行滤除。相较于目标区域,云碎片区域的平均灰度值较小且凸出区域尺寸较大,因此可以构造一个多层次的模板对其进行滤除。基于以上分析,本文提出了一种基于多方向多层次模板的有效目标检测算法。
2 红外弱小目标检测
2.1 模板的方向构造
在红外图像中,云边缘区域很容易产生错误检测。为了能够准确区分出不同区域,文献[5]提出了一个4×4网格的具有4个方向的区域模型,具体如表2所示,4个方向值如图2所示。

表2 文献[5]提出的模型

图2 带有4个方向的模板Fig.2 Template with the four directions
表2中,列出了6类不同区域的灰度分布情况,其中不同颜色代表不同灰度值。模型①~④为边缘类灰度分布,每一个模型对应一种类型的边缘,其中模型③、④为两种斜方向的边域,模型①为水平方向的边缘区域,模型②为垂直方向的边缘区域;模型⑤的灰度分布很均匀,为云中及净空背景类区域;模型⑥呈现出中间灰度高周边灰度低的态势,为弱小目标类区域。边缘类模型有4种灰度分布模型,加上云中及净空模型和目标类模型,红外弱小目标图像就有了6类区域模型。因此,红外弱小目标图像可以认为是由这6类区域构成的,这6类区域模型就构成图像的分类基础。
为了提高检测的准确性,本文提出了带有8个方向的模型结构,将原来的水平方向分为上、下两个方向,垂直方向分为左、右两个方向,两个斜方向分为左上、左下以及右上和右下四个方向,具体如表3所示,8个方向如图3所示。

表3 本文提出的模型

图3 带有8个方向的模板Fig.3 Template with the eight directions
在检测过程中,由于云边缘区域的灰度分布图具有方向性,采用带有上述8个方向的模板可以顺利筛选并去除该区域。
2.2 模板的层次构造
由于目标区域的灰度分布与云碎片区域的灰度分布特点相似(见表1),因此,表2中的目标类模型容易被云碎片区域干扰,导致云碎片区域“乱入”的情况。相较于目标区域,云碎片区域的平均灰度值较小且具有较大面积的凸出区域,因此,通过平均灰度值和凸出区域面积这两个约束条件,可以将目标类模型分为多个层次来对云碎片区域进行滤除。通常情况下,红外弱小目标的像素数目大概在3~10之间。本文图像的目标模型分为两层,里面一层为3×3格,外面一层为9×9格,这样,红外弱小目标便包括在了这个模板里面。考虑到云碎片区域的凸出区域面积要比目标区域的大,为了能够将云碎片区域剔除出去,再在这个9×9格的模板里面分出中间一层,大小为5×5格,具体如图4所示。

图4 三层模板图Fig.4 Three layers of the template
2.3 图像预处理
在对目标进行检测前,为了提高实时性,先对图像进行预处理。可以先将净空区域与云中区域进行滤除,这样能够提高剩下区域的检测速度。本文采用形态滤波和中值滤波对其进行处理。形态滤波法[6-8]检测红外点目标,主要是通过对图像进行形态学的开运算得到一幅图像,由于经过开运算后得到的图像中弱小目标区域会消失,因此将该图像与原图像做差值运算得到差值图像,就得到了检测结果。中值滤波[9-11]是一种邻域运算,类似于卷积,把某一像素点邻域中其他所有像素的灰度等级按大小排列,然后选其中间值作为该像素点的输出值。其主要原理是:首先确定一个以某个像素为中心点的邻域,然后将邻域中的各个像素的灰度值按大小进行排序,取其中间值作为中心点像素灰度的新值,这里的邻域被称为窗口。当窗口在图像中上下左右进行移动后,利用中值滤波算法可以很好地对图像进行平滑处理。
本文结合形态学滤波和中值滤波原理,通过形态学中的膨胀运算使得图像中的弱小目标区域增强,通过中值滤波算法消除噪声平滑图像,再将两者得到的结果做差值,即得到滤除净空区域及云中区域后的图像。采用式(1)对图像进行计算。
(1)
其中:I(x,y)代表原始图像;g(s,t)和h(m,n)分别代表了形态学滤波和中值滤波的结构元素;h(m,n)大小为3×3;Id是形态学中的膨胀滤波图像;Im是中值滤波图像;ε是一个高通滤波算子,本文中ε的门限值介于0.08×max(I(x,y))和0.15×max(I(x,y))之间;Inew是进行预处理后得到的包含目标的图像,如图5所示。

(a) 原始灰度图像

(b) 经过预处理后的灰度图像
2.4 目标检测


(2)
式中,θ1和θ2是阈值参数,其流程图如图6所示。两个阈值参数的选取会对结果造成影响。
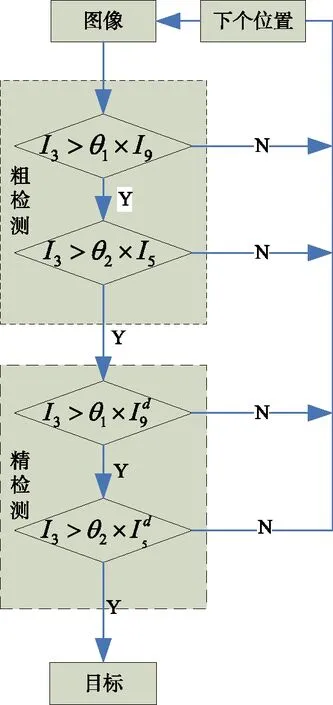
图6 图像处理流程Fig.6 Image processing flow chart
2.5 基于模糊控制的参数优化
参数θ1和θ2的取值会影响目标检测的结果,因此,基于模糊控制[12-13],提出一个参数最优化算法,通过该算法进行不断迭代,根据迭代结果对参数进行不断更新,可以得到较为理想的结果。具体步骤如下:
1) 步骤1:设θ1和θ2的初始值为1,以σ=0.01的步长进行增加,目标数TN开始为大于20的数,目标的初始位置为Lt=Linitial;
2) 步骤2:采用本文所提出的算法来检测目标位置Lt,然后更新参数TN,Lt;检查TN是否大于10,若大于10,转步骤3,否则,转步骤4;
3) 步骤3:按照表4更新参数,然后转步骤2;

表4 基于模糊控制的参数更新
2.6 总流程图
本文提出的算法总流程如图7所示。

图7 算法总流程Fig.7 Algorithm flow chart
3 实验验证
首先经过预处理将图像的净云区域和空中区域滤除,然后采用3层次8个方向的模板对要检测区域进行运算处理,滤掉云碎片区域及云边缘区域(其中两个参数采用模糊控制进行最优化),最终得到的像素值最高区域便是目标区域。
以下通过几组实验来验证本文算法的有效性。在所有的实验中,采用具有复杂背景的单幅图像,共10幅,前5幅图像像素为160×160,后5幅图像像素为128×128。
从表5可以看出,本文提出的算法能够有效地检测出红外弱小目标,且从序列图8~9看出,即使目标被云层遮挡,本算法依然能够较好地检测出目标。
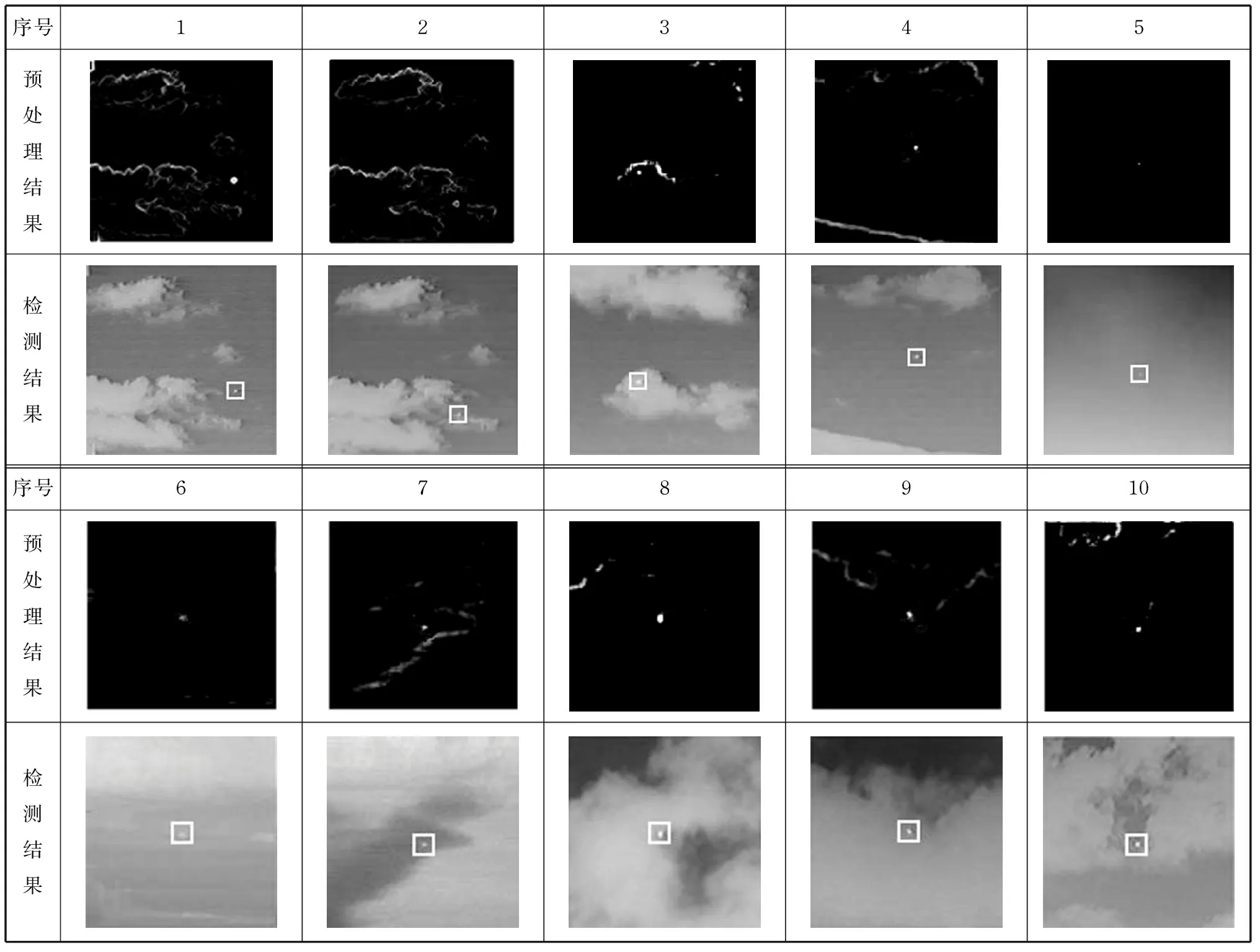
表5 实验数据
4 结束语
本文基于灰度特征分析,提出了一种红外弱小目标的检测算法。首先,通过一个带有8个方向、3层结构的模板,在红外图像中获得不同类型的灰度特征;然后,采用预处理方法提高检测速度,并基于模糊控制进行参数最优化计算;最后,实验表明,本文提出的目标检测算法是有效且稳定的。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年6期)2022-07-02
集装箱化(2021年1期)2021-04-12
雪豆月读·高年级(2020年2期)2020-09-10
中国信息技术教育(2020年2期)2020-02-02
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
飞天(2018年8期)2018-10-29
科技视界(2018年3期)2018-04-02
红领巾·萌芽(2015年1期)2015-04-10
