航天器大功率并网控制技术研究
2019-01-21 08:22,,,,,*
中国空间科学技术 2018年6期
,,,,,*
1. 北京卫星制造厂有限公司,北京 100080 2. 北京市空间电源变换与控制工程研究中心,北京 100080
航天器之间并网供电控制技术是中国空间站建设需突破的关键技术。国际空间站在节点舱配置了恒压变换器RACU(Russian-to-American Converter Unit)和ARCU(American-to-Russian Converter Unit),用于美国轨道舱与俄罗斯功能舱之间并网供电,供电模式为功率不可调节的恒压模式,功率不超过1 kW[1-2]。在中国载人航天工程第二阶段,利用天宫一号目标飞行器和神舟八号载人飞船开展了500W功率不可调节的并网供电试验,初步验证了并网供电控制技术的合理性[3-4]。目前我国载人航天工程处于空间站建设第三阶段。空间站由核心舱与两个实验舱在轨交会对接组成,与来访货运飞船和载人飞船交会对接形成更为复杂的组合体。与第二阶段相比,空间站的复杂度和功率量级显著提高,功率由2 kW提高到10 kW。在阳照期间,空间站组合体之间存在的阳光遮挡效应会导致部分舱段和飞船供电能力不足。为了解决这一问题并充分发挥空间站能源系统整体效率,在借鉴国际空间站和我国载人航天第二阶段成功经验的基础上,提出了配置能源管理计算机和大功率并网控制器(PSC)的并网控制技术方案,以满足并网功率不低于4 kW、具备恒压和恒流两种工作模式以及通过1 553B总线进行功率调节的并网供电需求。能源管理计算机实时监测各舱段发电能力并分析负载功率需求,根据分析结果确定并网控制器输出功率。可见空间站无论从并网功率量级,还是从供电模式和调节控制等方面,均对并网供电控制提出了更高要求。本文通过大功率并网供电控制技术研究,对并网控制器的电路拓扑、热设计、并联均流和控制电路进行了优化,可以满足我国空间站、载人登月以及深空探测等组合体航天器的并网供电控制需求。
1 并网控制方案
空间站能源管理计算机通过1 553B总线指令对并网控制器的输出电流或电压进行设置,实现并网控制器并网能力(最大输出电流)以及输出电压调节。并网控制器设计需考虑输出功率、恒压和恒流输出模式、输出电压和输出电流调节范围,以及针对输入母线和负载的保护功能。
为了实现并网控制器的标准化和模块化设计,将功率扩展到20 kW以上,以满足未来我国航天器更大功率的并网供电需求,同时考虑到现有功率器件的性能水平及热设计难度,将并网控制器变换器单元(CU)的额定功率设置为2 kW,并具有自动并联均流功能以及数字调节功能。
根据上述方案,针对空间站功率、故障模式和可靠度需求,并网控制器配置了3个变换器单元,其中2个用以满足4 kW功率需求,另1个作为冗余备份以提高可靠度并消除单点故障模式。正常情况下,整机最大功率为2×(2+1) kW=6 kW。假设并网需求功率为2nkW,则至少需配置n个单元,再根据整机可靠度指标要求,确定冗余备份单元数量m,则最大输出功率为2(n+m) kW。并网控制器整机组成框图见图1。
图1中测控单元1和2互为备份,实现对变换器单元的输出电压和电流调节、参数和状态采集,并对外进行1 553B总线通信。串联在输出母线的隔离开关通常为大功率继电器或接触器,用于并网供电的接通和断开控制。
为了避免或降低并网供电接入时对并网母线带来的冲击,在并网供电接入前,并网控制器利用并网母线电压检测和输出电压调节功能,首先将其输出电压调节到与并网母线电压相等,再控制隔离开关闭合,可实现并网控制器平稳接入并网母线。由于正常并网供电时,并网控制器处于恒流输出模式,并网母线电压基本保持不变,因此并网输出电流与输出功率成正比,即通过调节输出电流可实现对输出功率的调节。
1.1 变换器单元拓扑
根据参考文献[5-9]提出的功率变换电路拓扑,同时为了进一步降低输出整流和续流肖特基二极管的热耗,变换器单元采用输入并联、输出串联四相双管正激功率电路拓扑。该拓扑可大幅降低作为开关管的功率器件金属氧化物场效应晶体管(Metal-Oxide-Semiconductor Field-Effect Transistor,MOSFET )以及作为整流和续流管的肖特基二极管的电压应力,并降低热耗和温升。变换器单元功率电路拓扑见图2。
功率变换电路拓扑采用四相90°交错脉冲宽度调制(Pulse Width Modulation,PWM)控制,开关管工作在交错移相状态,输入输出滤波器工作于4倍频模式,可有效降低输入和输出电压、输入和输出电流的脉动幅度,并可减小变压器和滤波器的体积和质量。四相驱动信号时序见图3,Ts为四相周期,每相占空比为25%~50%,时序相邻两相驱动信号起始时间间隔为1/4Ts。
1.2 变换器单元闭环控制
变换器单元的闭环控制调节器原理见图4。
依据文献[10-13]提出的闭环控制参数设计方法,变换器单元的闭环控制使用了电压和电流比例积分调节器,分别对应恒压和恒流模式的负反馈闭环控制。调节器输出经过二极管或逻辑送至PWM控制芯片,对变换器单元的输出电压和输出电流进行闭环控制,使并联的变换器单元均处于恒压或恒流工作模式,确保并网控制器无论是单独恒压带载,还是恒流并网供电,均能提供稳定的供电输出。
图4中Ioref为变换器单元的电流基准,即对应恒流模式的输出电流设置指令值,Ios为变换器单元恒流模式实际输出电流采样值。Voref为变换器单元的电压基准,即对应恒压模式的输出电压设置指令值,Vos为变换器单元恒压模式实际输出电压采样值。U1为恒流模式输出电流闭环控制误差放大器,U2为恒压模式输出电压闭环控制误差放大器。
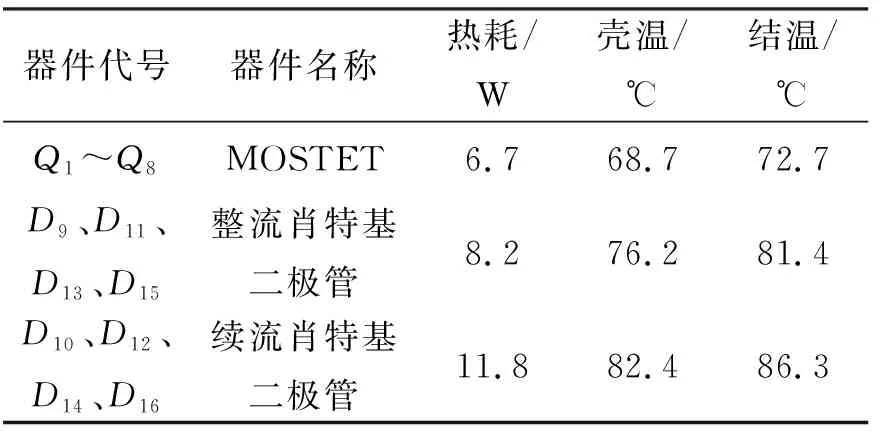
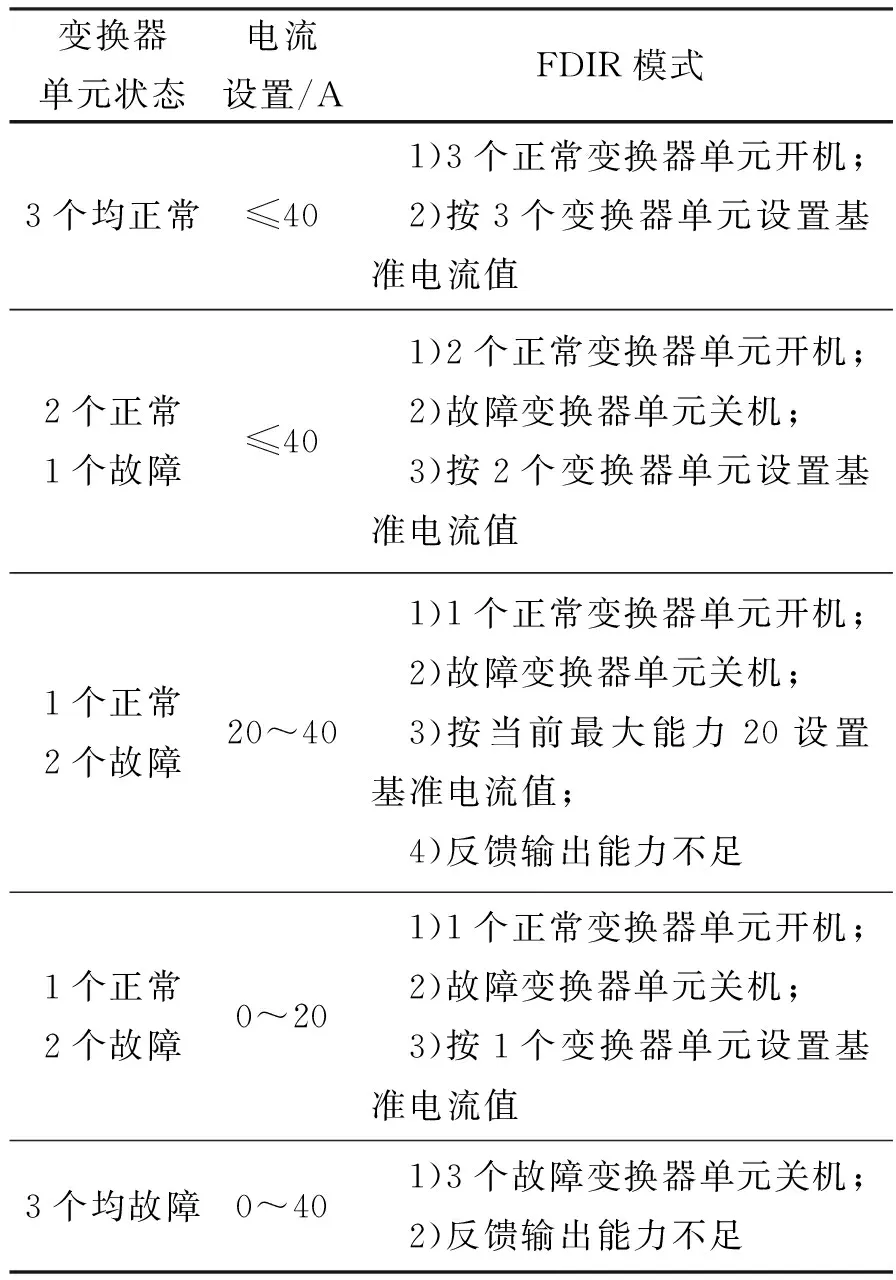
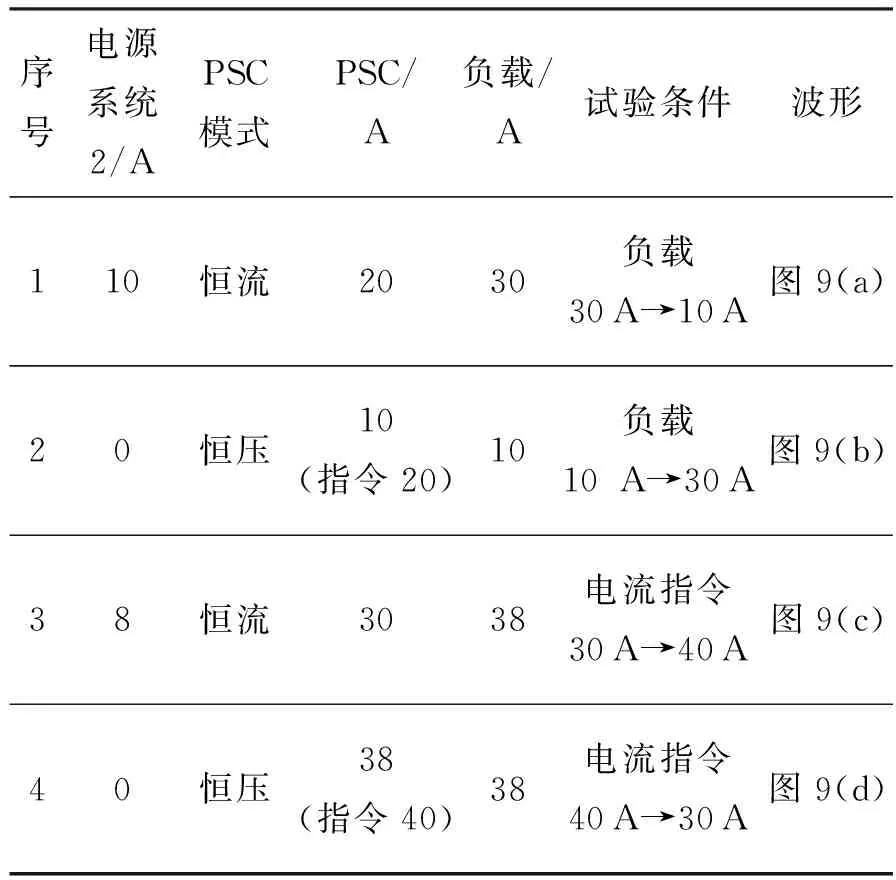
变换器单元的闭环控制电路工作在负反馈闭环调节状态,当Ios 针对负载变化和电流设置指令变化引起的工作模式变化,结合功率电路拓扑结构,通过优化图4中电流调节器R1、R2、C1和电压调节器R4、R5、C2,可调节并网控制器工作模式变化过程的动态特性[14],确保对供电电源系统和负载无影响。 DC/DC变换器并联应用可以扩展输出功率,但需要采用并联均流控制技术,以均衡并联变换器的输出电流。并联均流控制技术主要有主从均流法和民主均流法两大类。由于主从均流法需要设定主变换器,并且当主变换器故障时,并联的从变换器无法实现并联均流,因此主从均流法无法满足并网控制器冗余备份要求。民主均流法主要有平均电流法和最大电流法。通过对并联变换器公共均流母线的故障模式及影响进行分析,选用不存在单点故障模式的最大电流法,以确保变换器单元并联可靠性。 最大电流民主均流法自动设定主变换器,即并联变换器中输出电流最大者自动成为主变换器,其余则为从变换器。主变换器的输出电流信号最大,通过隔离二极管自动获得对均流母线的控制权而成为均流母线信号。各变换器单元实时比较各自的输出电流与均流母线信号,并自动对各自输出电压进行负反馈闭环调节,进而实现对输出电流的均流调节,使得并联变换器单元的输出电流满足均流精度要求。最大电流民主均流法并联均流控制原理框图见图5。图5中Io1、Io2、…、IoN分别为变换器1~N的输出电流,Io_BUS为均流母线信号。 并网控制器通过1 553B总线控制芯片接收并网供电输出电压和电流控制指令。运行于测控单元中的软件对指令进行有效性判断和解析,对于有效指令,软件通过控制微处理器(Micro Processor Unit,CPU)的地址总线和数据总线,将指令数据送给数/模转换器,锁存后形成变换器单元的基准电压或电流信号,实现对变换器单元输出电压或电流的调节,即实现对并网控制器的输出电压或者输出电流调节[15-16]。由于在并网控制器并网供电时的并网母线电压基本保持不变,因此调节并网控制器输出电流即对应调节并网控制器输出功率。并网控制器测控单元原理框图见图6。 航天器中单机产品典型环境条件为真空,由于辐射散热通常不超过散热总量的10%,因此在进行并网控制器热设计时,主要考虑传导散热措施。 变换器单元高热耗功率器件主要有原边开关管MOSFET以及副边整流和续流二极管,为了尽可能减小功率器件与单机安装面的热阻,将功率器件布局在变换器单元底部内表面,功率器件布局见图7。利用FLOTHERM软件建立了热仿真模型,将作为热边界的安装面设置为最高温度60℃。变换器单元在额定2 kW输出时,功率器件的热耗及仿真温度见表1。额定工况下实际测试表明,功率器件壳温均未超过仿真温度,最大误差为4℃。 器件代号器件名称热耗/W壳温/℃结温/℃Q1~Q8MOSTET6.768.772.7D9、D11、D13、D15整流肖特基二极管8.276.281.4D10、D12、D14、D16续流肖特基二极管11.882.486.3 根据并网控制器故障模式及影响分析结果,针对故障情况下对输入母线和负载的可能影响,变换器单元设计了相应的保护功能。对输入母线的保护功能包括输入过压保护、输入欠压保护和输入过流保护,对负载的保护功能包括输出过压保护、输出过流保护,另外还设计了确保自身安全的过热保护。 当并网控制器中变换器单元的工作状态满足上述某种保护功能的触发条件时,相应保护功能会发挥作用,可避免变换器单元中功率器件出现过电应力或热应力而失效,也可避免影响输入母线或负载,同时停止异常变换器单元输出,并自动断开其与输出母线的电气连接。为了在变换器单元或测控单元发生故障时,并网控制器仍然能够完成规定的任务,变换器单元和测控单元均进行了冗余备份设计。 变换器单元的输出均配置MOSFET作为隔离开关。当某个变换器单元出现故障,保护功能会自动使MOSFET隔离开关断开,将故障变换器单元与正常变换器单元和输出母线隔离,同时,异常变换器单元的状态标志会发生变化,并通过测控单元经1 553B总线输出。 测控单元实时检测并网控制器的输出电压、电流和变换器单元的状态标志,并与当前的电流设置指令值进行比较。当检测到变换器单元出现异常时,测控单元软件根据变换器单元当前状态标志,自动调整电流指令设置值,实现故障恢复,并保持输出电压和电流不变。针对并网控制器当前的电流指令和变换器单元的不同故障状态,空间站4 kW并网控制器FDIR模式见表2。 表2并网控制器FDIR模式 Table 2 PSC FDIR mode 变换器单元状态电流设置/AFDIR模式3个均正常≤401)3个正常变换器单元开机;2)按3个变换器单元设置基准电流值2个正常1个故障≤401)2个正常变换器单元开机;2)故障变换器单元关机;3)按2个变换器单元设置基准电流值1个正常2个故障20~401)1个正常变换器单元开机;2)故障变换器单元关机;3)按当前最大能力20设置基准电流值;4)反馈输出能力不足1个正常2个故障0~201)1个正常变换器单元开机;2)故障变换器单元关机;3)按1个变换器单元设置基准电流值3个均故障0~401)3个故障变换器单元关机;2)反馈输出能力不足 通过开展并网控制器与电源系统并网供电联试试验,验证了利用并网控制器为多舱段航天器组合体能源不足舱段进行并网供电方案的正确性和合理性。并网供电联试试验系统由电源系统设备、并网控制器和模拟负载等组成,联试试验系统组成见图8。 针对并网控制器的工作模式与电流指令和负载变化之间的关系,进行了稳态和瞬态特性分析,基于分析结果确定了试验方案并开展了并网供电联试试验,试验典型工况见表3。 表3 并网供电联试试验典型工况 图9为对应负载和电流指令变化时,并网控制器模式转换过程中并网母线电压和输入输出电流波形。其中,并网母线电压波形对应图8中A点,并网控制器输入电流波形对应图8中I1,并网控制器输出电流波形对应图8中I2。从动态波形可以看出,负载变化和电流指令变化均会导致并网控制器由恒流模式转换到恒压模式的电压超调不超过2%,优于不超过5%指标要求。 本文针对中国空间站及将来更大功率并网供电需求,研究了高压大功率并网供电关键技术,并研制了并网控制器单机。结合单机测试和并网供电联试试验,可得出以下结论: 1) 利用本文并网供电关键技术研制的并网控制器可实现多舱段航天器电源系统并网供电控制; 2)与国际空间站相比,并网控制器可通过1 553B总线控制,功率更大并且具有供电功率数字调节功能; 3) 基本单元模块化设计便于功率扩展,以满足更大功率需求; 4) 并网控制器具有安全可靠、工作模式转换过程平稳及输出电压超调小等特点; 5) 适用于空间站工程、载人登月及深空探测等组合体航天器并网供电。1.3 变换器单元并联均流
1.4 变换器单元输出调节
1.5 功率器件热设计
1.6 故障保护设计
2 并网供电联试试验
3 结束语
猜你喜欢
军事文摘(2022年18期)2022-10-14
北京航空航天大学学报(2022年7期)2022-08-06
军事文摘(2022年12期)2022-07-13
小天使·三年级语数英综合(2022年4期)2022-04-28
煤气与热力(2021年12期)2022-01-19
军事文摘(2021年18期)2021-12-02
软件(2020年3期)2020-04-20
电子制作(2019年9期)2019-05-30
电子制作(2019年23期)2019-02-23
燕山大学学报(2015年4期)2015-12-25