基于PID调节的球磨机调速控制研究
2019-01-22 01:30穆海芳胡学青
九江学院学报(自然科学版) 2018年4期
穆海芳 李 明 胡学青
(宿州学院机械与电子工程学院 安徽宿州 234000)
1 球磨转速的影响
机械合金化技术[3]是使用球磨机将混合物料粉碎的过程,以行星式球磨机为例,球磨机的结构包含球磨罐(筒体),磨机衬板,球磨介质(常见的比如不锈钢磨球),球磨罐内的磨球随着球磨罐的转动而转动,磨球的运动不断的对物料进行冲击、研磨,实现物料的合金化。机械合金化的结果取决于球料比、球磨转速、球磨时间和过程控制剂等;球磨效率取决于磨球的运动形态,磨球的运动形态取决于球磨转速、磨球的数量以及球磨机的结构等。
球磨机内部磨球的运动形态因球磨转速的大小可以分为离心状态、抛落状态、泄落状态三种[4]。离心状态下,磨球的运动形式呈圆形轨迹,磨球与球磨罐壁之间,磨球与磨球之间的相对运动处于静止,对物料没有任何冲击与研磨作用,球磨效率为零。抛落状态下,磨球的运动呈抛物线轨迹,磨球随着球磨罐的转动上升到一定高度受重力及离心力的作用以抛物线轨迹形式下落,对物料主要是冲击作用。泄落作用下,磨球不会随着球磨罐的转动而上升,而是受重力作用聚集在球磨罐下半部分,磨球与磨球之间,磨球与球磨罐之间不停的相互运动,对物料主要是研磨作用。球磨机在实际工作中,磨球多以三种运动形态共存,但球磨转速的大小对磨球主要以哪种运动形态存在具有决定性作用,设磨球的三种运动状态的切换点对应球磨转速的两个临界值,当球磨转速大于等于其离心临界转速时,磨球的运动呈离心状态;当球磨转速小于其离心临界转速大于抛落运动的临界转速,磨球的运动呈抛落状态,当球磨转速小于抛落运动的临界转速时,磨球的运动呈泄落状态。
当物料较大时,为了加快粉磨的速度,应对物料主要进行冲击作用,使磨球以抛落运动形态为主;当物料较小时,为了降低粉磨的速度,应对物料主要进行研磨作用,使磨球以泄落运动形态为主。粉末粒度是表征物料大小的一个量纲,表明了合金粉末形成的效果,反映了球磨效率的高低。由前述分析,确定合适的球磨转速对机械合金化的过程,结果以及球磨效率都有影响。球磨过程中,粉末粒度大小时刻在变化,根据粉末粒度大小选取合适的球磨转速,就可以保证在整个球磨过程中球磨机始终工作在一个相对较优的状态,球磨效率较高,粉磨的结果较好。
为了研究粉末粒度和球磨转速的对应关系,选用Ti50A110Si40做机械合金化实验。首先将粒度小于15μm的Ti,A1,Si粉按名义成分Ti50A110Si40进行配料,放入QX-2型行星式球磨机的不锈钢球磨罐中,选用直径为8mm的不锈钢磨球,球磨罐密封后抽真空并充入氩气做保护。因为是研究球磨转速对粉末粒度的影响,所以选用固定的球料比20:1,球磨过程中添加过程控制剂无水乙醇,用RS-200激光粒度分析仪观察粉末粒度的变化过程。经过大量实验,选取3个球磨转速值观察粉末粒度在不同球磨转速的作用下随时间变化的过程,如图1所示。
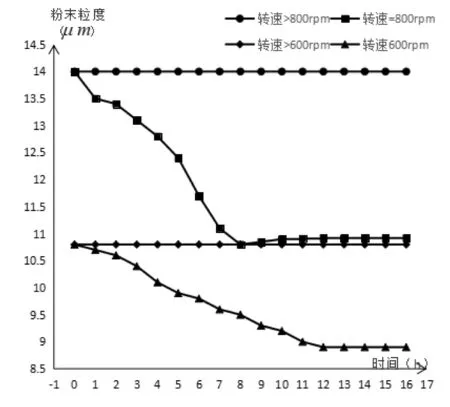
图1 粉末粒度变化图
当球磨转速大于800rpm时,粉末粒度大小没有变化,此时磨球处于离心运动状态,转速大于800rpm是离心临界转速。当球磨转速等于800rpm时,在0-8h时间段内粉末粒度是逐渐减小的,在8h时刻获得粉末粒度10.8um。在此时刻后,粉末粒度减小的趋势趋于缓慢甚至停滞,说明粉末粒度等于10.8um相对于初始粉末粒度是较小的物料,但此时磨球处于抛落运动状态,所以粉末粒度变化的不明显。粉末粒度等于10.8um的合金粉末在球磨转速大于600rpm的作用下粉末粒度没有变化,转速大于600rpm是抛落临界转速。粉末粒度等于10.8um的物料在球磨转速等于600rpm的作用下继续减小,此时磨球处于泄落运动状态。在球磨Ti50A110Si40合金粉体的整个过程中选取800rpm和600rpm转速作为球磨机工作的两个实际转速,因此在球磨开始时刻使球磨机运行在800rpm的转速,到了8h时刻再把球磨转速切换到600rpm,这样机械合金化得到的合金粉体的粉末粒度相对较小。
2 PID控制建模
在机械合金化的过程中要根据粉末粒度的大小适时调整球磨转速的值,由前述实验得出在球磨Ti50A110Si40粉体的过程中,需要在设定的两个转速值之间调速,为了提高球磨效率,调速性能的好坏就非常重要。在这里因为需要调节的速度值较少,主要保证球磨机的实际转速能够较好的跟踪给定值即可。
变频器通过改变电动机的电源频率调节电动机转速,对于三相异步电机,当其接入三相交流电就会产生旋转磁场,任意改变三相绕组中的其中两相,磁场方向改变,电动机转动方向也随之改变,其转速公式为:
n=n0(1-s)=60f(1-s)/p
1.2 疼痛的评估与记录 随着人们对疼痛的逐渐重视,疼痛护理工作在国内外均受到有关专家的进一步重视,有效地评估、准确的记录是疼痛护理实践的重要组成部分,且正确的评估疼痛是治疗的第一步[7]。目前,对于疼痛的评估和记录方法,国内外均未达成统一意见,通用的包括视觉模拟评分法(visual analogue scales,VAS)、数字评分法(numeric rating scale,NRS)、口述分级评分法(verbal rating scales,VRS)、面部表情疼痛量表(faces pain scale,FPS)以及行为评估法等[8]。
(1)
式(1)中,p是极对数,f是供电频率,s是转差率,n0是旋转磁场的转速,n是电动机转速;频率f和转速n是线性比例关系,在已知转速n的条件下,频率f就可以计算出来,通过改变供电频率就可以改变电动机转速。
PID调节器是工业控制过程中一种常用的控制技术[6-8],其结构简单,鲁棒性强,适用于线性调节系统,在连续系统模拟PID算法为:
(2)
式(2)中,P(t)是调节器的输出,e(t)是给定值与实际输出的偏差,Kp是比例系数,Ti是积分时间常数,Td是微分时间常数。
在连续系统中,PID算法主要是由比例、积分、微分硬件电路实现的;在离散系统中,PID算法是由计算机程序实现的,把模拟PID算法经过离散化处理就可以得到数字PID算法。具体的离散化处理方法是把模拟PID算法中的积分项用求和公式代替,微分项用差分公式代替,得到数字化位置式PID算法:

(3)
式(3)中,k表示第k次采样,T是采样周期。
比例系数成比例的反映对偏差的作用,增大比例系数,可以提高系统的反应速度,但会降低稳定性,积分部分可以消除系统静差,增大积分时间常数,积分作用则会减弱,微分环节作用于滞后系统可以抑制超调,加快系统调节响应。在实际使用中,根据每一项的特点,灵活选择P、PI、PD和PID控制中的一种,同时要根据系统不同的需求改变Kp、Ti和Td等3个参数值,以获得良好的控制效果,即参数整定。
为了获取更好的调速系统性能,文章选择PID调节器建立变频调速的闭环控制系统,经过PID调节器运算得出的结果作为变频器的输出频率,就可以使球磨机按照给定的转速运行,球磨转速变频调速PID闭环控制系统结构如图2所示。

图2 球磨转速PID控制结构图
r是输入值即给定转速,c是输出值即实际转速,速度传感器用来测量输出值再反馈给输入端与输入值比较获得偏差作为PID调节器的输入,由PID运算的结果送给变频器控制三相异步电机的转速即球磨转速。
为了得到球磨机控制系统的数学模型,先计算电动机和球磨机的数学模型,再由变频器的数学模型计算出球磨机变频调速系统的数学模型,最后进行PID控制仿真验证,系统的数学模型为:
(4)
式(4)中,p为三相异步电机的极对数,J为传动系统转动惯量,为异步电机转子磁通量,R为异步电机转子磁阻,K为变频器频率变化的速率,T为变频器到达设定频率的时间。
3 结果分析
为了验证PID控制系统是否有效,选用额定功率25Kw的西门子变频器做仿真,选用的三相异步电机具体参数如表1所示。

表1 三相异步电机具体参数表
采用实验法来整定PID控制器的各个参数,多次实验后最终整定的3个参数值为Kp=30,Ki=100,Kd=2,由前述球磨机磨粉实验得到的两个球磨转速为600rpm和800rpm,球磨转速控制的仿真结果如图3。
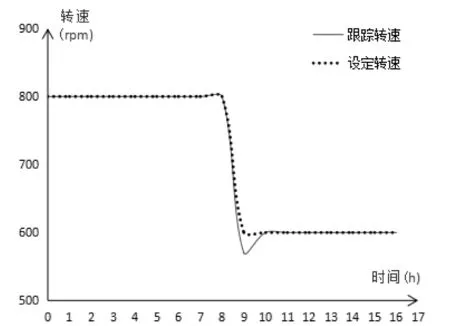
图3 球磨转速仿真图
由图3可以看出,采用PID调节器控制的变频调速系统响应快,在8h时刻给定的球磨转速从800rpm变成600rpm,系统的输出转速紧跟改变,系统超调小,稳态误差小,系统的实际输出转速值稳定在给定值,因此使用PID调节器可以提高变频调速控制系统的性能。
PID控制的变频调速球磨机运行过程中粉末粒度的变化情况如图4所示。
图4 PID控制的粉末粒度的变化图
在实验的时间范围内可以看出,粉末粒度一直减小达到最小值9.5um,与前述恒定的球磨转速相比,制备的粉末粒度明显要小,提高了球磨效率。
4 结论
使用机械合金化技术制备Ti50A110Si40合金粉体,通过实验观察合金粉体颗粒大小随着球磨机转动的变化过程,得出了能够提高球磨效率所需要的球磨转速的两个临界值即800rpm和600rpm。采用PID调节器建立球磨机转动的变频调速控制系统,以球磨转速的两个临界值作为控制系统输入的设定值,通过仿真实验看出控制系统的输出值能够较好的跟踪输入的给定值,说明了系统的良好性能,满足了机械合金化Ti50A110Si40粉体过程中球磨转速变化的需求。
猜你喜欢
辽宁化工(2022年9期)2022-09-29
机械工程材料(2022年8期)2022-08-29
防爆电机(2022年2期)2022-04-26
商品与质量(2021年10期)2021-11-24
粉末冶金技术(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
石油化工建设(2019年6期)2020-01-16
电子制作(2019年20期)2019-12-04
安徽冶金科技职业学院学报(2015年3期)2015-12-02