
基于SSVEP的脑控飞行器研究与实现
2019-01-29 02:45徐贤吴正平查彬
电子测试 2018年24期
徐贤,吴正平,查彬
(三江学院,江苏南京,210012)
0 引言
近年来,在脑机接口(Brain Computer Interface)技术逐渐在医学工程、休闲娱乐等领域体现出较高的学术价值、科学意义和应用前景。如今用大脑控制设备的技术不再是幻想,用“意念”控制身边的设备已成为可能,本文正基于脑机接口技术,通过SSVEP(Steady-State Visual Evoked Potentials)技术实现脑电信号控飞行器的目的,本技术的实现,对助残康复等医疗服务机器人设计有较高的参考应用价值。
1 系统整体方案设计
人体脑电信号在视频受到视觉刺激时会含有与视觉刺激相关的频率成份,从而我们可以通过采集SSVEP信号,提取特征频率,转换成控制指令从而控制飞行器飞行状态。系统通过8通道便携式无线脑电信号采集装置采集脑电信号,对特征频率进行识别分类,建立刺激频率与飞行方向之间的映射关系,最终达到控制目的。其总体框图如图1所示。
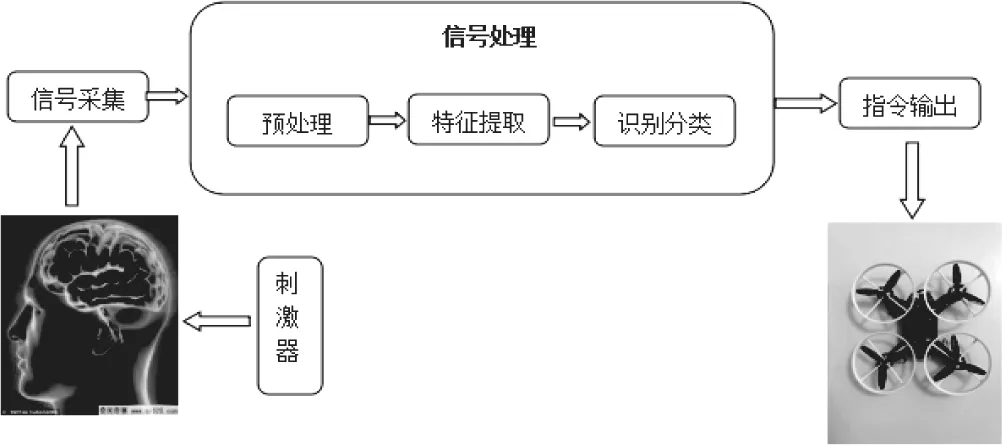
图1 系统总体框图
2 飞行器硬件设计及关键参数速写
飞行器硬件设计采用STM32F103RCT6系列控制器作为主控芯片,使用MPU6050作为运动处理传感器芯片,通过I2C通信协议对飞行器姿态进行检测,再检测返回的值计算并输出控制4个电机。微控制器通过SPI协议与NRF24L01模块进行数据交换;上位机通过串口转UART与飞行器进行实时通信,其整体框架如图2所示。
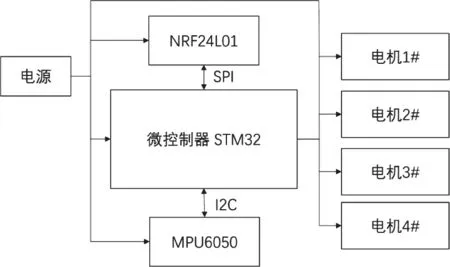
图2 飞行器系统框图
2.1 姿态传感器模块
设计中采用6轴运动处理组件MPU-6050,通过获取陀螺仪和加速度的值并传给微控制器,微控制器计算后输出电机控制量给电机,从而控制飞行器。图3为姿态传感器模块的电路图。
2.2 四轴飞行器控制程序设计及PID参数整定
四轴飞行器控制程序的主要设计思路:首先上电之后初始化STM32串口,中断,定时器,IO口等外设,获取MPU6050的原始数据,通过I2C获取加速度数据acc_z, acc_x,acc_y和陀螺仪数据gyro.x、 gyro.y 、gyro.z;其次对得到的6个数据进行处理,通过DMP固件得到倾仰角pitch,翻滚脚roll,偏航角yaw;最后将得到的角度作为串级PID的输入量,计算得出电机控制PWM量输入给电机。

图3 MPU6050电路图
四轴飞行器控制系统属于非线性二阶系统,串级PID控制器可提高系统的控制稳定性和工作频率,抗干扰能力强。本设计采用的串级控制器,将角度和角速度作为控制对象,其中角速度作为内环,角度作为外环。控制框图如图4所示。
串级PID控制器参数整定方法是内环采用凑试法,外环采用曲线法。内环参数整定时先确定一个X轴,把外环的参数P整定为0,此时角速度为0,然后依次整定P、I、D参数,具体的方法是先根据飞行器状态确定P的极性,然后凑试P的值直至等幅震荡。外环P参数整定时,先给定一个角度,通过NRF发送给上位机此时PWM的输出量,记录各个参数,如表1所示,通过对这些数据拟合曲线进行分析,最终选定的比例参数为1的时候,系统响应及时,最终趋于设定的角度如图5所示。
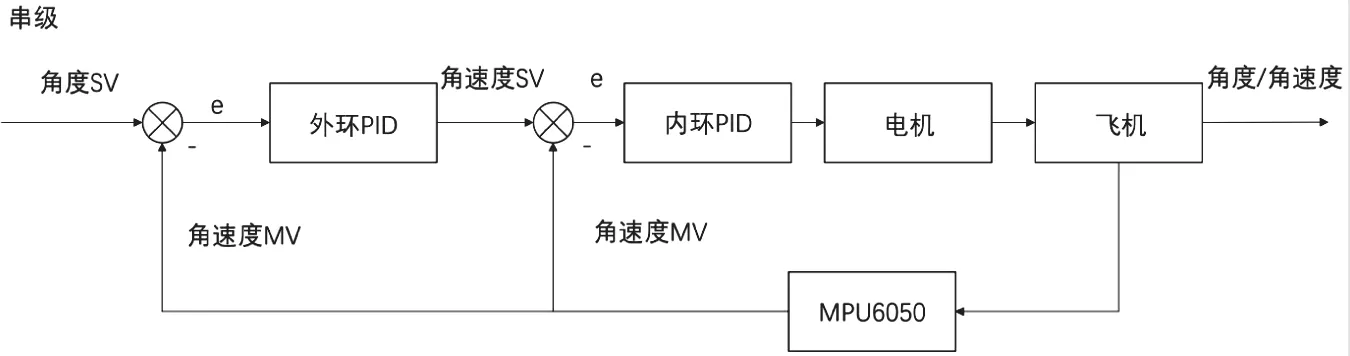
图4 系统串级控制框图
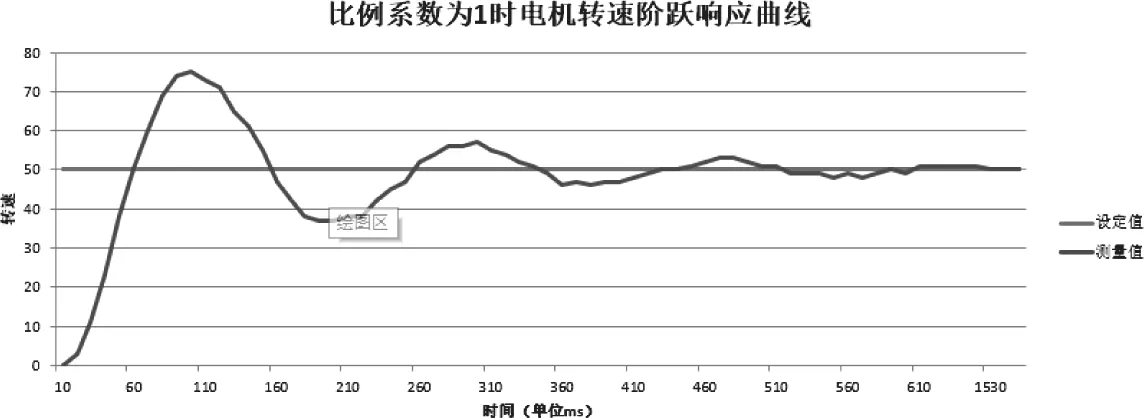
图5 响应曲线
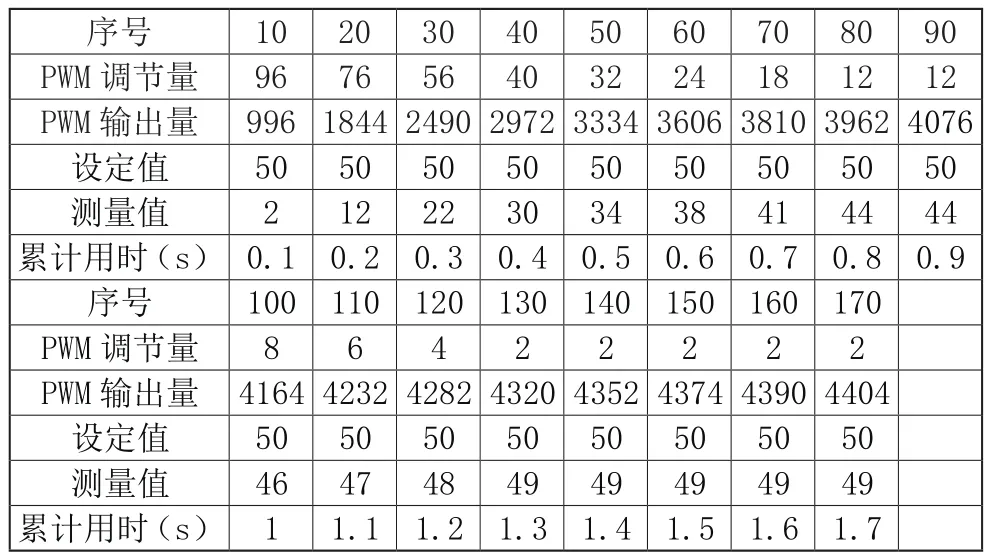
表1 数据表格
对于Y轴可以采用相同的方法。由于整个飞行器质量分布不均,会造成两个轴的参数不一样,但是还是很接近。
3 SSVEP系统设计
3.1 视觉刺激器的设计
如图6所示,在人体眼睛注视有固定频率刺激源目标时,视网膜感光细胞接收到刺激信息,通过神经传输通路传到视觉皮层,在这里引起神经变化,产生相应的电位。产生电位的方式有瞬间视觉诱发电位和稳态视觉诱发电位,本设计研究的是稳态视觉触发,它的电位具有信噪比高、频谱稳定,而且刺激时间短,会发生电位重叠,此时电位会趋于稳定,且有周期性,通过频谱分析,它的刺激源频率和倍频会出现明显的峰值。
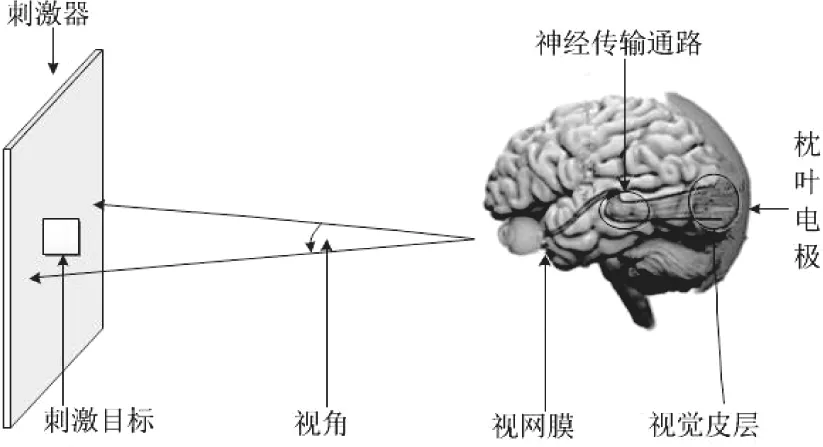
图6 视觉诱发电位产生的过程
3.2 视觉刺激器的类型和参数
目前能有效诱发SSVEP信号刺激源类型有LED、LCD等。本设计借助电脑显示屏LCD作为刺激源的产生,软件上修改参数即可对刺激源进行频率控制。
SSVEP中刺激频率采用低频段作为刺激源。为了减少LCD刺激时的干扰,故选择LCD刷新频率的正因子作为刺激频率,设f0为LCD的刷新频率,N为正整数,则可以选择的频率如下表2所示。

表2 可供选择的最佳刺激频率
由于刺激源的个数一般最多为5个,综上所述,本次研究选择其中4个作为刺激源的频率,分别为6Hz,6.7Hz,7.5Hz,10Hz。
3.3 LCD刺激器的设计
LDC刺激器是在Labview环境下来设计的,其界面如图7所示,它采用Labview中的while关键字实现刺激源不同频率闪烁。界面中刺激源采用4个黑色白底的圆组成,如需要改变频率只需要在下面的数字,然后运行即可。
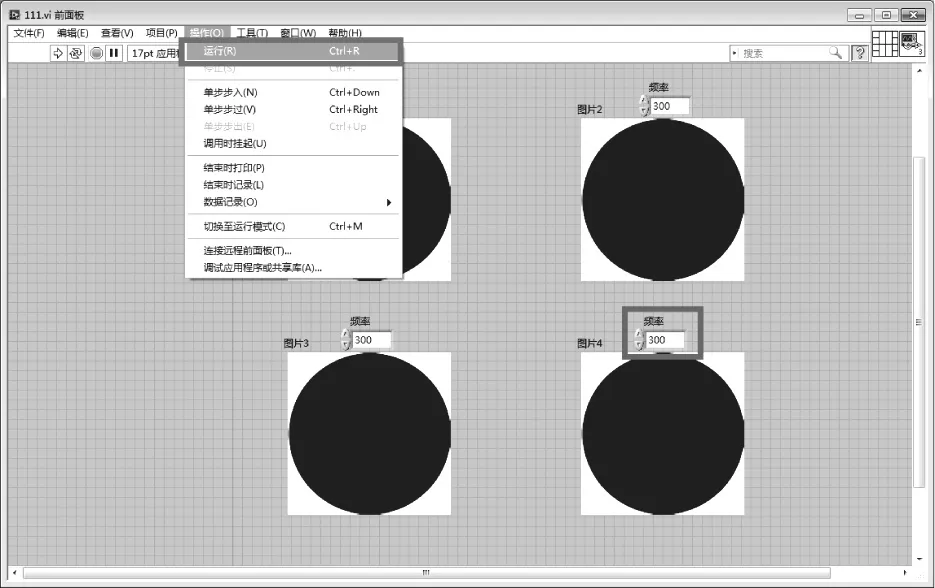
图7 刺激源界面
3.4 脑电采集与处理
3.4.1 脑电采集
本次设计选择了一款无线ERP脑电采集器。图8所示为阻抗测试界面,脑电帽采用无胶便携式电极帽,眼睛与LCD的距离大约为0.6m左右,为保证采集信号的完整性和准确性,先测试电极帽上的每个电极的阻抗值,一般要求阻抗不高于30kΩ。
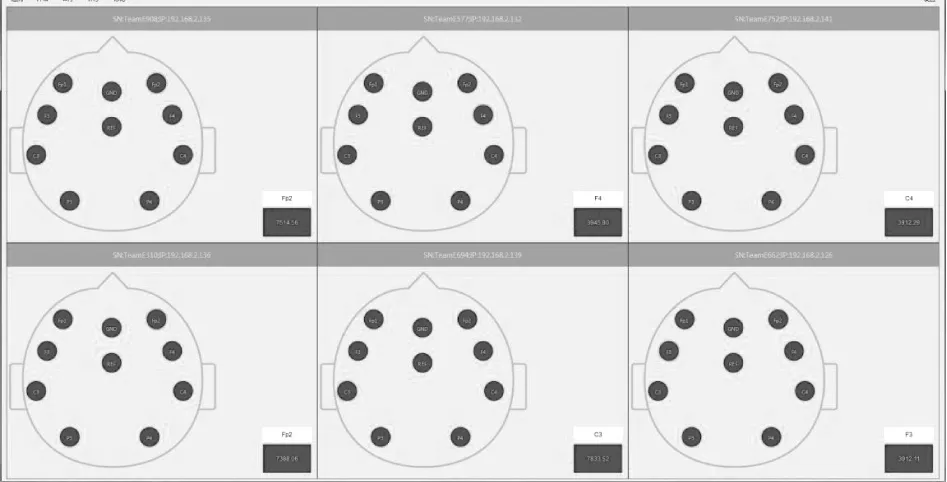
图8 阻抗测试界面
在完成以上几个步骤之后,就可以开始采集脑电信号。采集系统中8个采集通道对应着一片区域的脑电信号。采集脑电信号如图9所示,波形数据可以保存到本地,进行离线分析,也可实时传输数据。
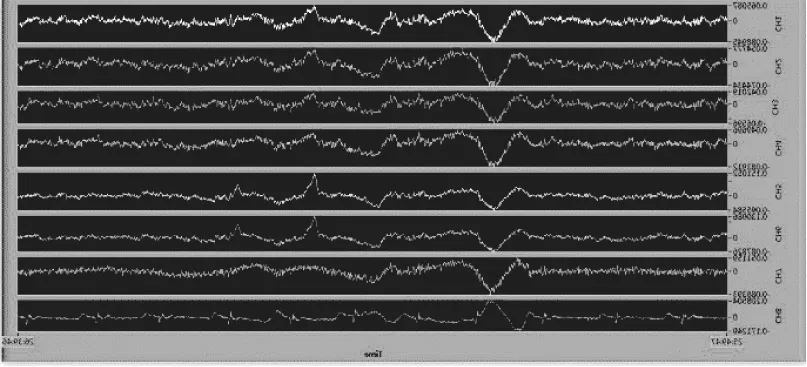
图9 脑电信号采集上位机图
3.4.2 信号特征提取及处理
典型相关分析方法(CCA)是研究多个变量与多个变量之间相关性的算法,可以满足本设计采用8通道信号采集的特点,其基本思想是找出两组变量X和Y在整体上的相关系数ρ并使其最大。定义多通道SSVEP信号为Xn,

式(1)中,n为通道编号,Xnfm是原始SSVEP脑电信号经过小波包分解重构的fm频段的信号。建立相应的参考信号矩阵为:

然后求得最大的相关系数

式(3)中,cov(Xn,Y)为 Xn和 Y 的协方差,σXn和 σY分别为Xn和Y的标准差。
将SSVEP信号进行小波包分解之后得到重构信号,根据CCA算法计算出各个通道的Xn和Y的最大相关系数ρm,然后比照判断SSVEP刺激信号的频点fm。
4 脑控飞行器识别测试
通过ERP采集盒子信号处理之后,我们最终的目的是需要这些信号变成我们让飞行器识别的控制命令。系统测试需要飞行器在上电几秒钟后升起,悬停在一定的高度进入待控制状态,测试者集中精力注视LCD上的方向刺激源控制飞行器。从表3中可以分析,同一个测试者对不同的目标频率会产生不同的响应,而对于相同的目标频率,不同的测试者也会产生不同的响应。可见个体之间存在差异性,符合生物学中的人体各异观点。
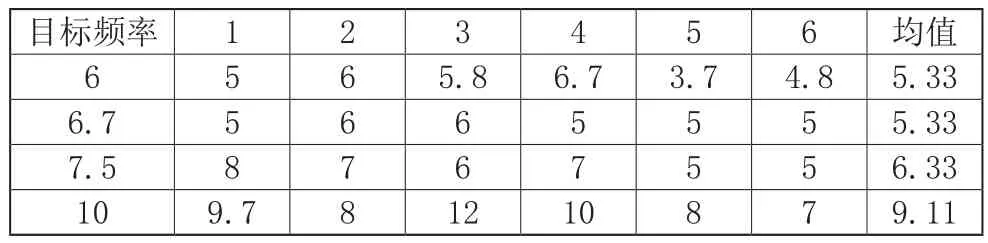
表3 目标频率特征识别对比
5 总结
本设计主要完成了以下工作:设计了基于Labview的LCD视觉刺激器,根据显示器60Hz的特性选定了需要闪烁的频率,其中刺激源的个数和闪烁的频率可以通过软件控制,这是不同于其他刺激器的一个特点;设计和完成了四轴飞行器的各个模块搭建,并能正常飞行;实现了微型四旋翼飞行器四个方向由脑电信号控制。
此外,由于每个人的脑电信号现象不一至,且在测试采集中很容易受外界噪音以及眼睛眨动等肌电干扰,所以如何确保采集到高质量的脑电信号还有待进一步的研究。
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
汽车维修技师(2019年7期)2020-01-16
科技传播(2019年24期)2019-06-15
电子制作(2019年7期)2019-04-25
科技创新导报(2019年29期)2019-03-16
汽车维修技师(2018年11期)2018-05-11
北京航空航天大学学报(2017年9期)2017-12-18
首都食品与医药(2017年1期)2017-10-26
中学生数理化·高一版(2017年1期)2017-04-25
实用手外科杂志(2015年1期)2015-08-27
