
基于矢量跟踪的MEMS⁃SINS/GNSS深组合导航系统
2019-02-10 08:54赵志鹏王新龙
导航与控制 2019年6期
赵志鹏,王新龙
(北京航空航天大学宇航学院,北京100191)
0 引言
随着现代军事技术的不断进步,SINS/GNSS组合导航越来越难以满足高动态载体的导航需求。高动态载体通常是指速度快、加速度和加加速度大的载体。美国喷气动力实验室(Jet Propulsion La⁃boratory,JPL)定义的高动态条件为达到了100g/s的加加速度和70g的加速度增量[1]。
载体的高动态运动,给GNSS射频载波信号引入了较大的Doppler频移,且Doppler频移随时间变化剧烈,给精确估计卫星信号的载波频率和伪码相位带来了巨大困难。传统的GNSS射频信号模型适用于低动态载体环境,针对高动态载体的应用,其未考虑信号在空间传播过程中载体高动态机动对Doppler频移的影响。当信号中的Doppler频移足够大且变化足够剧烈时,接收机中的伪码和载波跟踪锁相环(Phase Locked Loop,PLL)对载波频率的跟踪精度下降,且难以维持锁定,易造成载波跟踪丢失。由于载波跟踪提供了精确的伪距率量测信息,伪距和速度的估计精度也会随之降低,进而码跟踪环路失锁,使得整个 SINS/GNSS组合导航系统的导航精度下降。
针对由载体高动态运动带来的困难,基于矢量跟踪结构的深组合系统逐渐成为研究热点。它不仅像松组合、紧组合可通过融合SINS和GNSS信息来校正SINS,还可将融合的导航信息用于控制载波和伪码数控振荡器(Numerically Controlled Oscillator,NCO),辅助 GNSS 的捕获和跟踪[2⁃5]。SINS/GNSS深组合系统的结构优势降低了系统对IMU的性能要求,从而使得低成本、小型化的MEMS⁃IMU的应用成为了可能。矢量跟踪结构由Spilker提出,其核心是矢量跟踪环(Vector Tracking Loop,VTL),利用导航状态估计与信号跟踪之间的内在联系,将两者结合到一个算法中,并对接收到的信号进行汇总,而不是进行单独的处理[6⁃7]。因此,VTL中的各跟踪通道相互依赖,以增强其应对信号中断的能力[8]。然而,载体的高动态带来的Doppler频移的剧烈变化,可能导致导航滤波器异常,致使系统无法提供精确的导航信息。Ronca⁃gliolo提出为环路滤波器配置更多极点,以提高滤波器的阶数,并用二阶锁频环对三阶锁相环进行辅助,使跟踪环路对高动态的最大容忍能力达到了40g[9]。但滤波器阶数的提高,并未有效解决跟踪精度和动态容忍能力之间的矛盾。Fortes等指出,通道中的跟踪误差如不能有效减小,该误差将对系统导航精度产生较大影响[10]。Jaradat和Ab⁃del⁃Hafez提出了基于自回归神经网络的数据融合结构,用于低成本 INS和 GPS系统的组合[11]。Nourmohamadi和Keighobadi研发了一种直接分布式的组合方案,并将其用于低成本INS/GPS系统。其中,QR分解容积卡尔曼滤波器被用作状态估计算法[12]。Boada等提出了一种新的观测器,其使用模糊推理系统,结合了无迹卡尔曼滤波(Unscented Kalman Filter,UKF),提高了载体侧滑角的估计精度[13]。张欣对矢量跟踪结构如何提高跟踪灵敏度进行了研究[14]。陆国生等探索了一种以标量跟踪结构辅助矢量跟踪结构来改善环路稳定性的方法[15]。曾广裕等改进了扩展卡尔曼滤波(Extended Kalman Filter,EKF)矢量跟踪模型,接收机动态性能经仿真验证被证实良好[16]。Chen等提出了一种基于自适应迭代扩展卡尔曼滤波器(Adaptive Iterated Extended Kalman Filter,AIEKF)的矢量跟踪环路,可以在初始误差较大的情况下保持无偏差跟踪,但其矢量跟踪环路变得很脆弱[17]。Liu等介绍了一种起源于基带信号线性模型的直接位置跟踪环路(Direct Position Tracking Loop,DPTL)方案,并进行了分析[18]。尽管DPTL的跟踪和定位性能优于矢量跟踪环路,但其因计算量太大而难以获得应用。
本文针对高动态载体Doppler频移快速变化的特点,设计了一种基于MEMS⁃IMU的低成本、小型化的SINS/GNSS深组合导航系统,并对该系统的性能进行了仿真验证。
1 深组合导航方案设计
1.1 传统GNSS信号模型及其缺陷
GNSS卫星发射的信号通常包含多个频段和多种伪随机码,而接收机可能仅使用其中的一个频段和一种伪随机码。因此,在只考虑接收机跟踪的信号频段和伪码时,GNSS接收机接收到的射频信号可表示为
式(1)中,S是GNSS接收机天线端接收的所有N颗卫星的信号。对于第j颗卫星信号而言,Aj是信号的幅值,Pj是信号上调制的伪码,t是当前时刻的系统时间,τj是从发射到接收过程的时延,Dj是信号上调制的导航数据,Δfj是由用户与卫星之间的相对运动引发的Doppler频移,fL1是载波角频率,φj是信号的初始相位,n是接收的噪声。
在该模型中,GNSS接收机射频信号的Doppler频移用Δfj进行表达。对于高动态载体接收机而言,其高速度、高加速度、高加加速度带来的Doppler频移将快速变化。对此,模型中的Δfj未能体现,难以准确反应高动态载体GNSS射频信号的特性。对此,本文提出了以下修正。
1.2 高动态载体GNSS信号模型修正
由于高动态载体伪距计算的主要误差来源是由载体高动态运动带来的Doppler频移剧烈变化,第j颗卫星与载体接收机之间的伪距为

式(2)中,ρ(t)是卫星与接收机间的伪距,Rj是真实距离,c是光速,te是电离层造成的时延,δres是其他误差项(包括卫星轨道误差、对流层延迟、星钟误差、相对论视向误差)。对伪距ρ(t)在tN时刻附近进行Taylor展开有

忽略高次项,取近似为

式(4)中,v(tN)是卫星与接收机间的视向速度,a(tN)是视向加速度,j(tN)是视向加加速度。
GNSS射频信号的Doppler频移为

式(5)中,fd是 Doppler频移,c是真空中的光速。
当载体做高动态运动时,Doppler频移可能存在较大的一阶和二阶变化率,其分别为
Doppler频移的快速变化使信号载波的中心频率也发生快速变化,同时也导致信号中调制的伪随机码频率发生快速变化。所以,将高动态载体GNSS射频信号模型修正为
1.3 通道滤波器设计
SINS/GNSS深组合导航系统将GNSS的跟踪环路参数与SINS信息进行了组合。与其他组合方式相比,深组合导航系统的信息融合层次更深,融合的信息更加接近原始量测,在高动态环境下具有更好的导航性能。深组合的导航方式基于矢量跟踪结构,系统复杂,数据处理量大。为了减轻组合导航滤波器的负担,通常利用分布式结构,通过在GNSS接收机各跟踪通道中设置残差滤波器的方式,对伪码相位、载波相位和载波频率及其一阶、二阶变化率跟踪误差进行滤波。
通道滤波器取状态量


由于在通道滤波器状态量中考虑了GNSS射频信号载波频率的一阶、二阶变化率,通道滤波器对载波频率的跟踪更加精确,使得导航系统的总体精度得以提高。
通道滤波器的观测量取


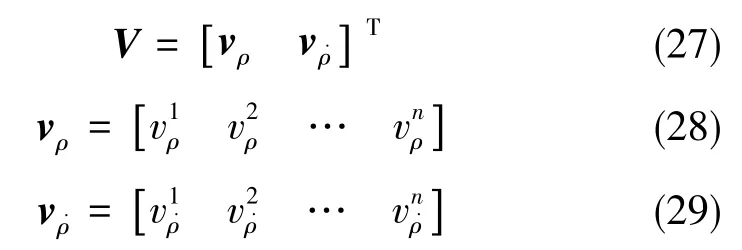
式(12)中,vP和vC分别是码跟踪环和载波跟踪环鉴别器的噪声。
1.4 MEMS-SINS/GNSS深组合导航方案
基于矢量跟踪结构的MEMS⁃SINS/GNSS深组合系统结构如图1所示。
系统先由射频前端获取GNSS信号,并将信号下变频为中频信号,各通道分别对卫星信号进行相关运算,经通道内的残差滤波器滤波后,结合MEMS⁃IMU信息进行组合导航解算。解算的结果一方面用于估计出接收机钟差,提高伪距、伪距率的解算精度,另一方面可结合解调的星历数据判断出卫星的可见性,计算可见卫星的位置和速度,进一步计算出各卫星的伪距、伪距率,控制载波和伪码NCO,进而复制出精确的本地载波和伪码,用于相关运算。
在系统中,组合导航滤波器取状态量

式(13)中,δθ是三向姿态角误差,δv、δr分别是三向速度、位置误差,εb、εr是陀螺常值漂移和一阶Markov误差,Δb是加速度计零偏,bbr是接收机钟差及其漂移。状态方程为

式(14)中,F为状态转移矩阵。
系统噪声向量取为

式(15)中,wεb、wεr分别是陀螺三向噪声项及其一阶Markov白噪声项,wΔb是加速度计三向噪声项,wr是GNSS接收机钟差一阶Markov白噪声项。
噪声变换矩阵为
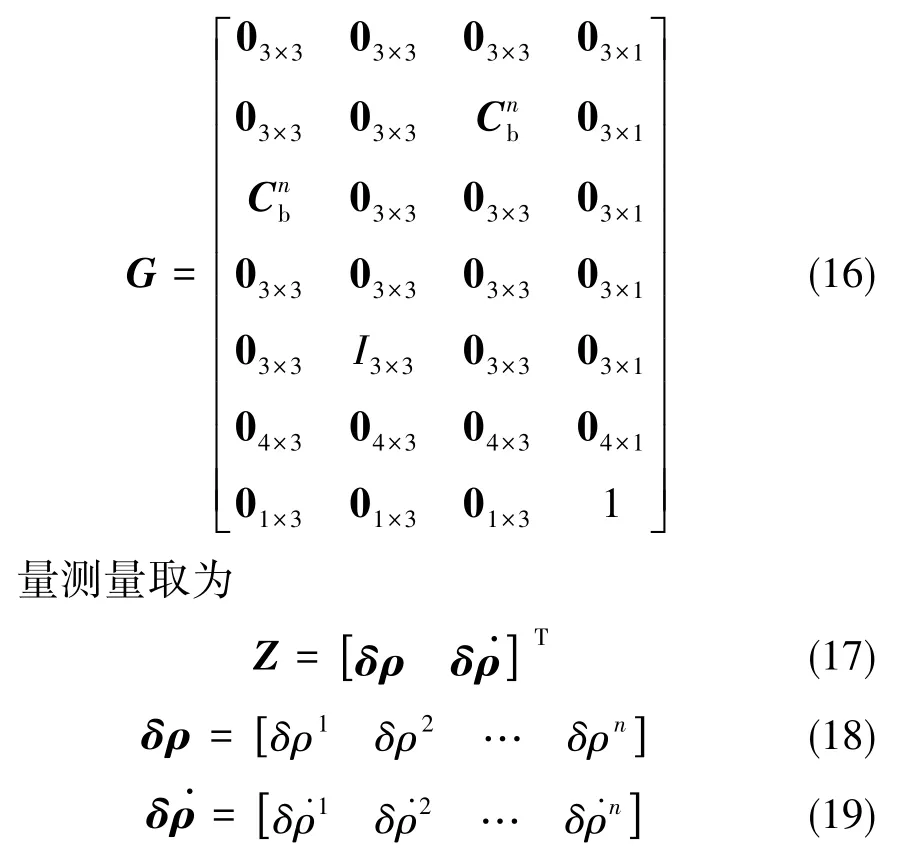

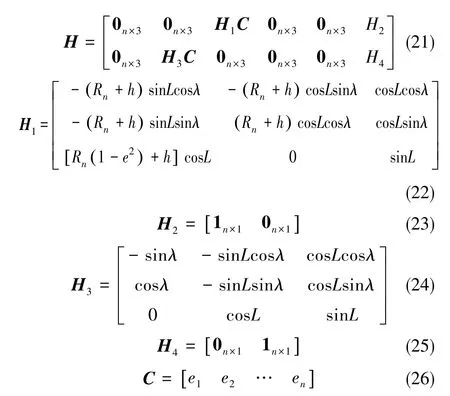
式(20)中,量测矩阵为
2 仿真验证
载体做高动态运动的情况如图2所示。在0s~1s内,做加速度为-25g的匀减速运动;在1s~1.5s内,加速度以100g/s的加加速度变化;在1.5s~3.5s内,做加速度为25g的匀加速运动;在3.5s~4.5s内,加速度以⁃100g/s的加加速度变化;在4s~6s内,以-25g做匀减速运动;在6s~7s内,加速度以70g/s均匀增加;在7s~10s内,做45g的匀加速运动。

图2 高动态载体加加速度和加速度随时间的变化Fig.2 Changeover of jerk and acceleration of high dynamic carrier with time
由图3~图5可知,基于矢量跟踪的MEMS⁃SINS/GNSS深组合导航方案与传统深组合导航方案相比,可以有效减少由载体的高动态运动带来的影响。高加加速度的运动虽然造成了导航结果的波动,但仍然能够较快收敛。纬度、经度的位置误差不超过5m,高度误差不超过15m,东向、北向速度误差不超过1m/s,天向速度误差不超过2m/s,俯仰姿态误差不超过0.8°,滚转姿态误差不超过0.5°,偏航姿态误差不超过0.6°。本文方法在载体高动态机动环境中可以获得更高的导航精度。

图3 三向位置误差曲线Fig.3 Curves of three-direction position error

图4 三向速度误差曲线Fig.4 Curves of three-direction velocity error

图5 三向姿态误差曲线Fig.5 Curves of three-direction attitude error
3 结论
本文对传统GNSS接收机射频信号模型在高动态载体应用中的缺陷进行了修正,并基于此提出了MEMS⁃SINS/GNSS深组合导航预滤波器的设计方案,在GNSS接收机跟踪通道中使用该预滤波器对伪码相位、载波相位和载波频率及其一阶、二阶变化率跟踪误差进行滤波,从而提高了深组合导航系统的性能。基于矢量跟踪的MEMS⁃SINS/GNSS深组合导航系统利用了导航解算与接收机信号跟踪之间的相关性,融合了接收机各通道的导航信息,滤波估计的位置、速度、姿态,IMU漂移误差、接收机钟差及漂移,辅助接收机计算了伪距、伪距率,得到了更精确的本地伪码和载波信号。进一步仿真验证表明,该系统能够较好地应对在高动态环境下由载体高加加速度运动带来的载波频率剧烈变化,在载体高动态运动环境下确保良好的导航性能。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
中国空间科学技术(2021年1期)2021-03-16
中国电气工程学报(2019年18期)2019-10-21
电子制作(2019年24期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
