
箭载SINS快速自对准技术
2019-02-10 08:54王海鹰石志华裴忠海刘懿龙
导航与控制 2019年6期
王海鹰,石志华,裴忠海,金 龙,刘懿龙
(上海航天控制技术研究所,上海200233)
0 引言
随着陀螺和加速度计精度的不断提高,箭载捷联惯导系统(Strapdown Inertial Navigation System,SINS)逐渐采用自对准技术替代传统水平对准+光瞄方案。运载火箭一般依托塔架竖立发射,初始自对准采用凝固惯性系粗对准[1]+Kalman滤波精对准方案[2]。粗对准仅进行一次运算,为精对准提供初始姿态。在静基座条件下,惯导系统可观测性弱,Kalman滤波器方位通道收敛缓慢[3]。
为满足火箭快速发射的背景需求,需要提升自对准快速性。文献[4]提出了一种利用逆向导航技术进行旋转自对准的方法,这种方法在粗对准和精对准阶段均使用了所有测试数据,在有限的对准时间内最大程度保证了对准精度,较好地解决了对准精度和对准时间的矛盾。但是该方法对箭载计算机存储空间和计算速度要求极高,工程实用性较低。文献[5]对回溯式自对准方法进行了改进,采用关键数据进行回溯自对准运算,大大降低了对箭载计算机存储空间的要求,减少了运算次数。但该方法仍要求箭载计算机在短时间内进行大量运算,实现困难。文献[6]提出了一种基于FIR和IIR低通滤波器的箭载SINS杆臂效应频域处理方法,通过对加速度计信息进行滤波运算,有效去除了有害杆臂的加速度信息,实现了存在杆臂效应的SINS快速高精度的粗对准。该方法会在加速度信息中引入时延,并且未能解决Kalman滤波器方位通道收敛缓慢与自对准快速性要求的矛盾。

1 凝固惯性系自对准基本算法
凝固惯性系自对准算法是根据重力加速度g在惯性坐标系内的运动轨迹为圆锥面,其运动包含了地球自转轴的方向信息的原理,通过解析法得到箭体姿态角实现的。该方法能够有效隔离外界的晃动,但隔离不了由于杆臂效应引起的有害加速度干扰。
该算法将姿态矩阵分解为5个矩阵进行计算


图1 自对准过程中定义的各坐标系间位置关系Fig.1 Position relationship among coordinate systems defined in self-alignment
2 移动窗双矢量构造
在移动时间窗口[nT-T1nT]内,双矢量在ib0系和i0系的投影表达式如下



3 低通滤波
火箭一般采用竖立静止发射,如图2所示。但由于外部风干扰,箭体往往不能保持竖直静止状态,而是微幅晃动。惯组安装位置相对摇摆点存在杆臂,因此会在加速度计输出中引入周期变化的有害加速度信息,这是凝固惯性系自对准的主要误差源之一[8]。

图2 箭体摇摆示意图Fig.2 Schematic diagram of rocket swing


低通滤波器输入输出关系如下

式(4)中,am、bl是待确定的滤波器参数,M为滤波器阶数。

图3 基于低通滤波的自对准算法框图Fig.3 Block diagram of self-alignment based on low-pass filter
4 算法验证
4.1 数字仿真验证
数字仿真中,SINS陀螺常值漂移和随机漂移均取为0.03(°)/h,加速度计常值偏置和随机偏置均取为0.1mg。设定箭体处于微幅晃动状态,俯仰和偏航通道理论姿态取值如式(5)所示。其中,Aϕ和 Aψ均取为0.2°,fϕ和 fψ均取为 0.35Hz。基于以上条件,模拟生成捷联惯组陀螺和加速度计脉冲进行自对准解算,仿真周期T取为0.02s,T1取为200s,T2取为100s。基于低通滤波的凝固惯性系自对准仿真结果与理论值偏差如图4所示,Kalman滤波精对准仿真结果与理论值偏差如图5所示。

由仿真结果可以看出,在3σ误差条件下,Kal⁃man滤波精对准方位精度需要500s才能收敛到均值附近,基于低通滤波的凝固惯性系自对准偏航通道收敛最慢,需要100s,收敛时间缩短了80%。两种方案三通道稳态精度均值基本相当,凝固惯性系自对准滚动通道波动较Kalman滤波精对准大。
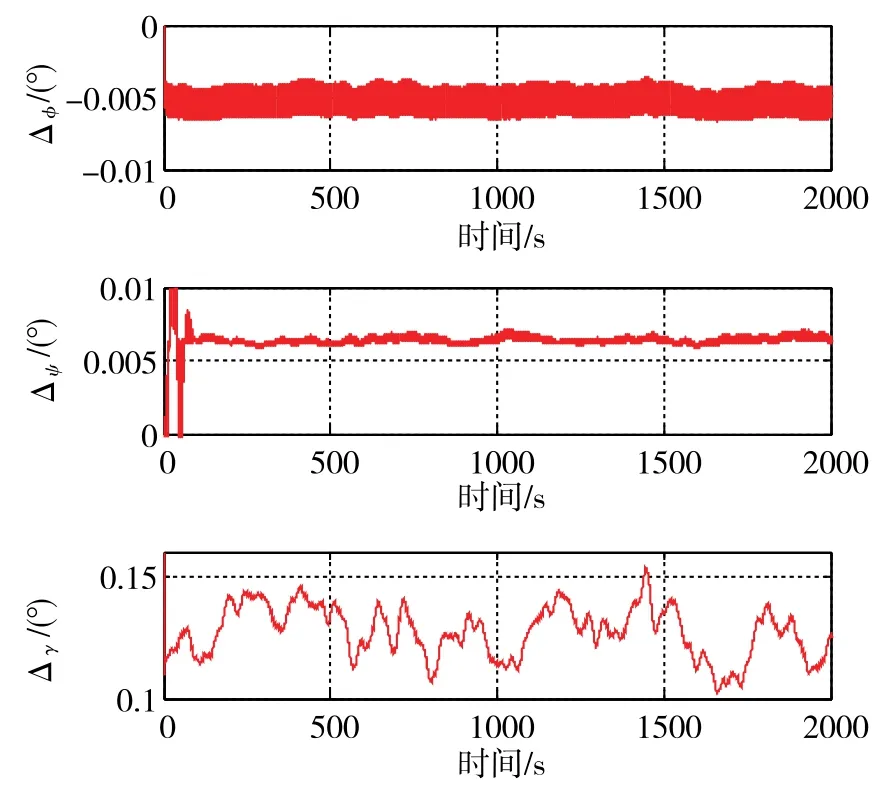
图4 采用低通滤波器的对准结果Fig.4 Alignment results with low-pass filter

图5 采用Kalman滤波的对准结果Fig.5 Alignment results with Kalman filter
4.2 试验数据验证
试验采用一般火箭发射环境,箭体依托塔架竖立,捷联惯组安装于仪器舱内,将全自主对准运算结果与水平对准+光瞄方案结果作差。凝固惯性系自对准结果偏差如图6所示,Kalman滤波自对准偏差如图7所示。
由试验数据运算结果可以看出,两种方案三通道对准精度相当,俯仰和偏航通道在10-3量级,滚动通道在10-2量级,凝固惯性系自对准滚动通道波动略大于Kalman滤波精对准方法,能够满足运载火箭使用要求,与数字仿真结论一致。三通道对准精度均优于数字仿真,Kalman滤波精对准收敛速度也快于数字仿真,这是因为真实惯组误差没有数字仿真使用的误差大,火箭实际摇摆环境也优于仿真条件。
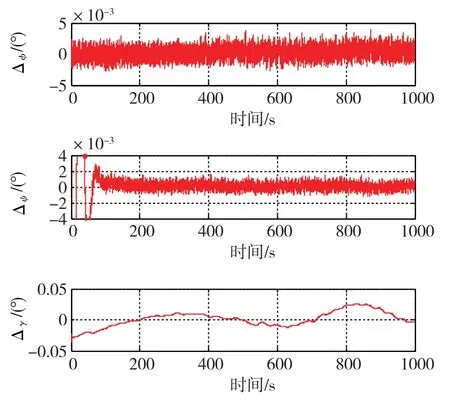
图6 采用低通滤波器的对准结果Fig.6 Alignment results with low-pass filter

图7 采用Kalman滤波的对准结果Fig.7 Alignment results with Kalman filter
在试验数据条件下,基于低通滤波的凝固惯性系自对准方案三通道姿态收敛时间小于100s,较Kalman滤波精对准收敛时间缩短了50%,大大提高了自对准快速性。
5 结论
本文结合凝固惯性系自对准算法,采用基于移动窗的双矢量构造方法,实现了自对准的实时解算。通过在凝固惯性系间姿态转换矩阵后端进行低通滤波,有效降低了杆臂效应引起的有害加速度影响,实现了运载火箭的快速高精度对准。
仿真结果和试验数据表明,基于低通滤波的凝固惯性系自对准与Kalman滤波精对准精度相当,验证了算法的有效性。算法能够在5min内实现箭载 SINS自对准,大大提高了初始对准快速性。
猜你喜欢
航天制造技术(2022年4期)2022-09-30
电子工业专用设备(2022年1期)2022-07-13
传感器与微系统(2022年3期)2022-03-23
飞控与探测(2021年5期)2022-01-05
导航与控制(2020年3期)2020-09-09
导航与控制(2019年4期)2019-09-25
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
航空模型(2017年3期)2017-07-28
