
基于PSO-SVM精化QP模型的短期卫星钟差预报
2019-02-12 10:20唐诗华黄昶程李宗婉
桂林理工大学学报 2019年4期
肖 阳,唐诗华,黄昶程,李宗婉,肖 燕
(桂林理工大学 a.广西空间信息与测绘重点实验室;b.测绘地理信息学院,广西 桂林 541006)
0 引 言
星载原子钟的钟差预报在卫星导航定位中起着重要作用,其可靠程度直接影响导航定位精度[1]。精确位置测量本质上也可视作精确时间的测量,高精度的卫星导航定位必须有高精度和高稳定度的时间系统来支撑,但星载原子钟不同于地面原子钟,在其入轨后,由于其本身的敏感性和外太空的不确定性,极易使其变化规律变得复杂[2]。且导航卫星的任意时刻钟差是由参数外推得到的,研究钟差预报有利于提高参数预报的可靠性与准确性,同时,在实时精密单点定位中需要采用钟差预报结果参与计算来实现高精度定位[3]。因此,建立高精度钟差预报模型显得尤为重要,这使得许多不同种类的预报模型算法应运而生,其中二次多项式(quadratic polynomial, QP)模型,灰色GM(1, 1)模型以及卡尔曼滤波模型是较为常用的预报模型[4]。而随着人工智能以及机器学习等方法的不断完善,人们也将人工神经网络引入钟差预报领域并取得成功。但灰色模型在建模时要求原函数光滑且呈指数规律变化;神经网络预报样本需求量大,算法效率低,且若模型参数选择不当易收敛于局部极值;而QP模型因其物理意义明确、模型简单,且在短期预报中精度较高而得到广泛的应用,但其在建模时把噪声看作是服从正态分布的误差,从而导致预报精度随时间的增加而降低[5-8]。针对此,许多学者从不同角度对其进行改进:文献[9]采用谱分析法, 提取钟差序列中的周期项, 构建附带周期项的二次多项式模型, 在短期预报中取得了较好的成果; 文献[10]用二次多项式进行建模, 并采用ARIMA模型对残差进行预报, 在一定程度上改善了ARIMA模型识别与定阶的问题, 提高了预报精度。
基于此,本文提出一种新的算法模型:将钟差视为一个趋势项与随机误差项构成的时间序列,使用QP模型对其建模预报以提取趋势项,将拟合残差视作随机误差项,利用在非线性预报方面具有显著优势的支持向量机(SVM)对随机项建模预报,其所得结果视作QP模型预报结果的补偿项进行改正得到最终预报结果。针对SVM现有的参数搜索方法,使用PSO优化算法对其进行优化,避免SVM陷入局部极值进而发生过拟合现象。以IGS提供的15 min的精密钟差数据为例,并与QP模型、灰色GM(1,1)模型以及PSO-SVM进行对比分析,探讨新方法在不同类型原子钟及不同建模方法下的可行性与普适性。
1 模型原理
1.1 SVM
1995年,Vapnik等基于统计学习理论,提出一种新的学习方法,即SVM。该方法以结构风险最小化原则为基本准则,通过核函数将输入变量非线性映射到一个高维空间中,于高维空间中构造线性优化函数并加以求解,其模型表达式为
(1)
式中:ai,ai′为非负的Lagrange乘子;K(xi,xj)为核函数;b∈R为阈值。其详细的模型方法与表达式原理参见文献[11]。
1.2 PSO-SVM
1995年, Kennedy与Eberhart基于鸟群捕食行为的启发, 提出一种智能优化算法,即PSO-SVM, 该算法具有结构简单、 易于实现、 对被优化函数要求不高的特点, 能有效提高收敛速度。 文献[12]详细介绍了该算法的基本原理。 PSO-SVM基本思想是利用PSO算法高效强大的全局搜索能力对SVM的参数c、g进行优化处理, 以期克服SVM自身的网格搜索法可能带来的局部最优或过拟合的缺点, 以获得更高精度的SVM模型[13], 其模型基本流程见图1。
1.3 QP模型
QP模型自使用以来,一直因其计算方便、简单、物理意义明确而广泛应用于短期钟差预报,其表达式为
yi=a0+a1(ti-t0)+a2(ti-t0)2,
(2)
式中:yi表示ti时刻的卫星钟差值;t0为参考时刻;ti为对应历元时刻;i=1,2,…,n;a0、a1、a2为3个待估参数, 而在钟差预报中, 其还有物理意义, 分别表示该卫星钟的钟差、 钟速以及频漂[14]。
1.4 改进模型
本文利用IGS提供的精密钟差数据,通过QP模型预报其钟差值得到拟合阶段差,采用PSO-SVM对残差进行建模预报,再利用所得预报值对QP残模型预报阶段的钟差值进行改进,并以具体实验探讨改进模型的可行性。改进模型公式为

图1 PSO算法优化SVM模型Fig.1 SVM model optimized PSO algorithm
(3)
式中:θi为拟合阶段的残差值;K(θi,θj)为所选SVM的核函数;i=1,2,…,n。本文采用能较好反映模型复杂程度的径向基核函数作为SVM的核函数,其具体流程详见图2。
2 算例分析
2.1 实验数据
本文采用IGS提供的2017-08-27—28的15 min采样率精密钟差数据为实验数据。 为体现本文算法的普适性, 拟采用不同种类的卫星钟作全面分析。 截至2017-08-28, GPS在轨卫星32颗, 其搭载的星载原子钟共有5种, 其中仅有PRN 04号卫星搭载BlockⅡA Rb钟,且目前处于维护中[15]。 基于此, 在其余4种类型原子钟中各选择一个卫星钟进行实验: BlockⅡF Rb钟(PRN 03,以G03代指), BlockⅡR Rb钟(PRN 13, 以G13代指), BlockⅡF Cs钟(PRN 24, 以G24代指)以及BlockⅡR-M Rb钟(PRN 31, 以G31代指),其2天的钟差序列如图3所示。
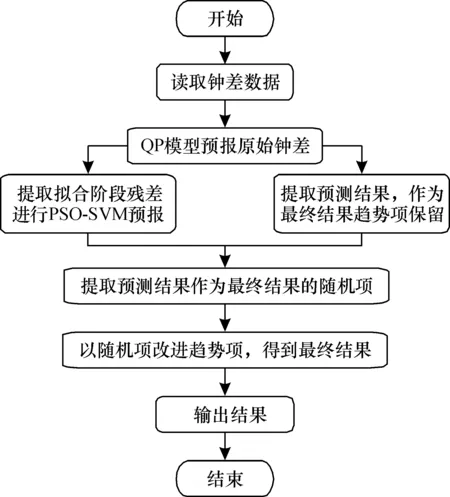
图2 改进模型预报卫星钟差Fig.2 Improved model predicting satellite clock bias
可知,本文所选钟差数据具有普遍代表性,涵盖了各种类型原子钟且钟差数据变化规律不同的钟差序列。为验证本文算法的可行性,首先对该4组钟差序列建模,以QP模型将1天的钟差建模,预报1天的钟差值,并将各组钟差序列的拟合残差与预报误差汇编成图4。
其中, 前96历元为模型拟合残差, 后96历元为模型预报误差。可见,QP模型具有明显的误差叠加性,G13号卫星误差叠加的虽不明显,但仍能看出其误差曲线随时间呈增长趋势,这是因为其在2 d钟差总增长量为118 ns,远低于另外两颗Rb钟,而G24搭载的是Cs钟,其钟差序列非平稳性相较于Rb钟更强,因此预报效果最差。各卫星钟的残差呈明显的随机性与非线性,证明本文所提出的新方法在理论上是可行的。基于此,本文以前96历元的拟合残差为训练样本,使用PSO-SVM建模预报,将所得预报值作为QP模型预报数据的误差补偿对其加以改进得到最后的预报值,验证其可行性,并将新方法与QP模型、灰色GM(1,1)模型以及PSO-SVM所得预报值作为对比,以验证其优越性。
2.2 建模分析
2.2.1 实验一 以IGS提供的2017-08-27—28的15 min采样率的精密钟差数据提取共192历元的钟差数据,建立4种预报方法进行比对。其中:方法1,QP模型;方法2,灰色GM(1,1)模型;方法3,直接对钟差序列使用PSO-SVM; 方法4, 基于PSO-SVM精化的QP模型。以为期1天的前96历元为模型的训练样本,后1天的96历元为测试样本,对比各方法的预报误差。因SVM核函数的选择对预报结果的精确度有较大的影响,为方便比较,方法3、4中的SVM都采用相同的核函数类型,即RBF核函数[16]。将各预报方法所得结果绘制成图5。
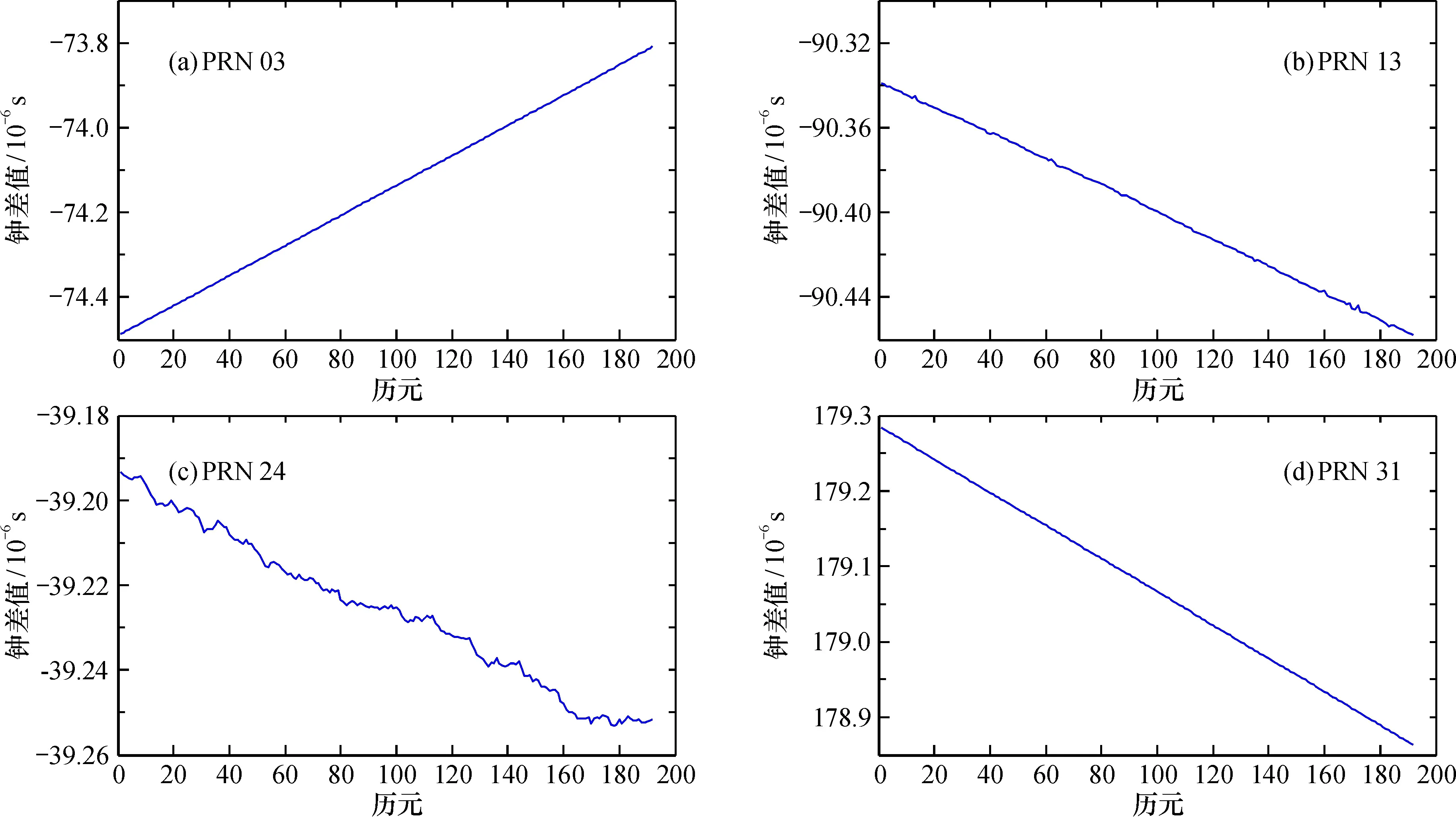
图3 原始钟差序列Fig.3 Original sequence of satellite clock bias
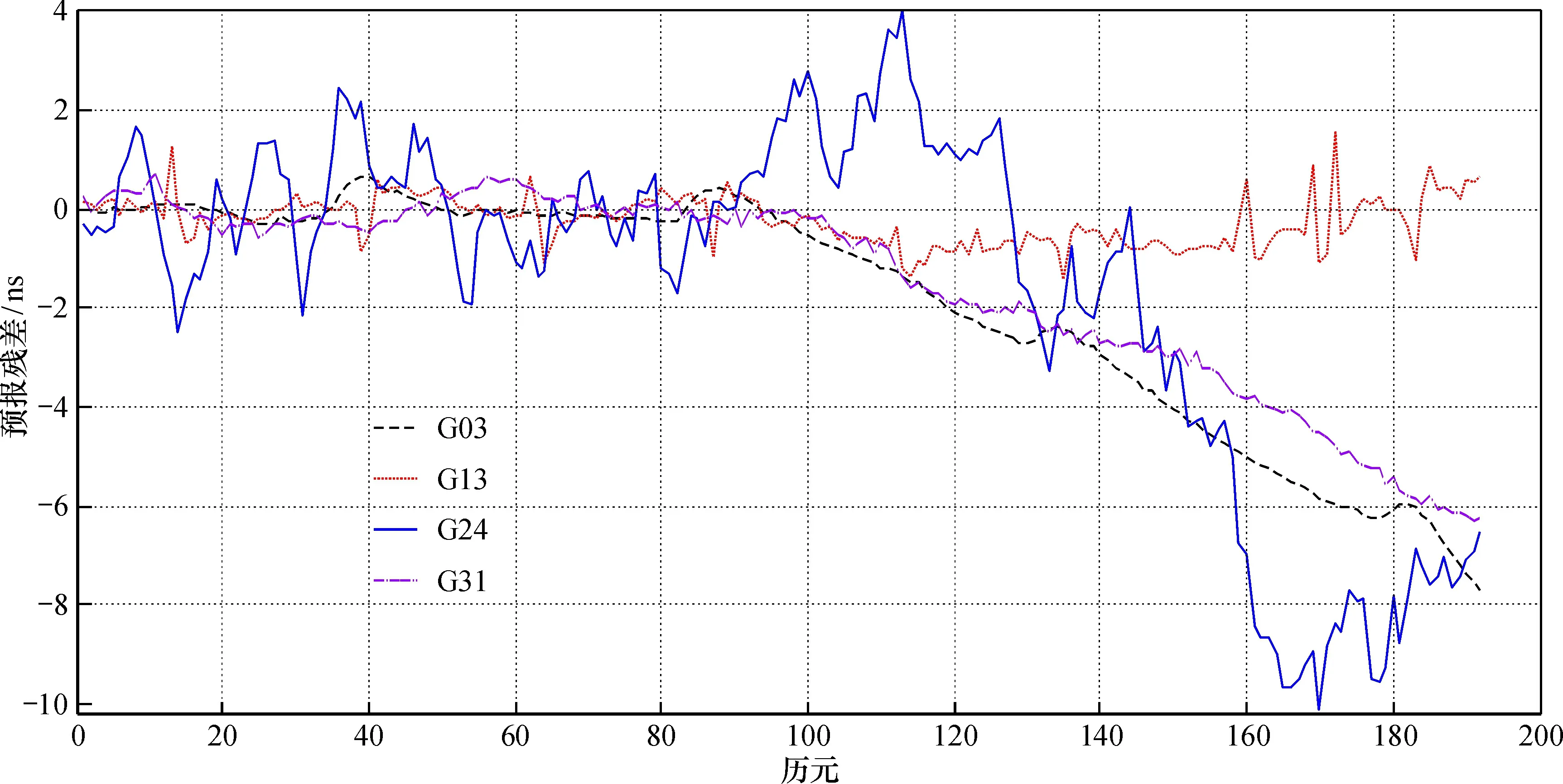
图4 二次多项式模型拟合与预报残差Fig.4 Fitting errors and prediction errors of QP model
可见,对于各类型原子钟的钟差预报,方法1的预报效果较差,其预报误差随时间呈总体递增或递减趋势,其中G03、G24、G31表现的尤其明显,而作为Cs钟的G24误差波动幅度明显大于其他3颗Rb钟,说明QP模型对Cs钟钟差序列的适应度逊于Rb钟钟差,符合星载原子钟自身的精度和性能特点,即Cs钟的自身稳定度稍逊于Rb钟,模型预报结果精度低于Cs钟;方法2在精度方面较方法1稍有提高,3颗Rb钟的预报误差波动幅度小于方法1,而Cs钟钟差仍稍显不理想,这是因为灰色GM(1,1)模型在建模时要求数据光滑, 而G24本身的钟差序列波动较大, 并不适用于灰色GM(1,1)模型; 方法3的预报残差优于方法2, 尤其Cs钟的预报残差明显比方法2大, 这可在一定程度上体现SVM在非线性预报方面的适用性; 而本文新方法的预报误差最小, 3颗Rb钟除极少数几个值之外, 其他误差都在-1~1 ns波动, 而Cs钟的预报误差也明显优于其他3种方法, 误差浮动于-2~2 ns。 相比其他3种方案的预报误差值随着历元的增加呈增长趋势, 而新方法误差并未随着时间有明显的增长, 这是因为其在QP模型的基础上加以改进, 而PSO-SVM的预测结果能较好地反映残差的变化规律对QP预报值加以修正, 使最终预报残差有更好的收敛性, 展现出了其更好的预报稳定性, 所以新方法是可行的。

图5 4种方法的钟差预报残差图Fig.5 Prediction error of satellite clock bias for four methods
2.2.2 实验二 为进一步体现本文算法的适用性与探讨不同建模方法的选择对预报精度的影响,现以4种建模方案对以上实验4种预报方法进行更加详细的分析。方案1:以前1天的数据建模对后1天的卫星钟差进行预报;方案2:以12 h的数据建模对1天的卫星钟差进行预报;方案3:以1天的数据建模对12 h的卫星钟差进行预报;方案4:以12 h的数据建模对12 h的卫星钟差进行预报。结合实验一的结果,以均方根误差(RMSE)为精度的度量标准
(4)

方案1即实验一,结合图表能更清楚地看出无论是哪种预报方法和建模方案,Cs钟的预报精度总是低于Rb钟,其均方根误差远大于另外3颗Rb钟,这是由于其Cs原子钟本身稳定度较差,从而使得其可预测性相对较差[17]。但无论是Cs钟还是Rb钟,本文提出的新方法的预报精度都远优于QP模型和GM(1,1)模型, 其均方根误差均小于1 ns, 而对于某颗卫星钟而言, 直接使用PSO-SVM建模预报的所得预报值精度可能与新方法相当。 这是因为G13卫星自身钟差变化量小且变化率稳定, 使得直接预测也能有较好的效果, 但对于绝大多数卫星钟而言, 新方法是要优于PSO-SVM的。 这进一步说明新方法是适用于大多数类型的卫星钟的, 具有更高的普适性。 而结合4种不同建模方案综合分析,无论哪种方案,新方法的预报精度总是最好的,说明新方法能较好地反映钟差变化特性,适用于各种类型建模的短期预报。但对比不同建模方案下的QP模型与新方法时可发现:当QP模型自身预报误差精度较差时,新方法的预报精度也会随之减低。例如G03号卫星以方案2建模时,QP精度相比其他3种建模方案而言较差,而以新方法建立4种方案对G03作预报,方案2的精度也是最差的。这是由于新方法自身建模时需要用到QP模型的拟合残差,所以会受到其影响。同时结合方案1、3以及方案2、4之间的比较可发现,在建模数据相同的情况下,新方法预报12 h的精度总是优于预报1天的精度,反映出新算法随着预报时长的增加,其预报精度和稳定性亦有一定程度下降,可以看出新方法并不适用于钟差的长期预报。
表1 卫星钟差预报结果的RMSE
Table 1RMSEof prediction results of for satellite clock bias ns

卫星钟类型预报方法建模方案方案1方案2方案3方案4G03BlockⅡF RbQP4.246.873.132.07 GM(1,1)1.740.890.840.76 PSO-SVM1.311.010.680.97 New-Model0.290.520.210.13G13BlockⅡR RbQP0.703.020.711.68 GM(1,1)2.351.771.601.22 PSO-SVM0.380.430.270.26 New-Model0.370.370.200.17 G24BlockⅡF CsQP5.3116.891.945.39 GM(1,1)5.232.204.751.98 PSO-SVM1.671.201.410.91 New-Model0.790.910.640.47G31BlockⅡR-M RbQP3.522.801.821.32 GM(1,1)1.300.950.810.62 PSO-SVM1.040.460.690.65 New-Model0.180.200.220.12
3 结 论
本文利用IGS中心提供的精密钟差数据,采用新方法对不同类型的GPS星载原子钟进行钟差预报与分析,得到如下结论:
(1)采用PSO-SVM对QP模型预报钟差时拟合阶段的残差值建模进行滚动预报,利用预报所得值对QP模型预报阶段的钟差值进行改进,实验结果表明该方法可行有效。
(2)对于不同数据建模的预报精度优于直接对原始钟差进行PSO-SVM、GM(1,1)以及QP模型预测所得的精度,相较于常用模型具有较强的预报能力以及较好的预报精度,且适用于不同种类的星载原子钟,显示其在钟差预报方面的普适性以及优越性。
(3)以QP模型建模时的拟合残差为二次建模数据,在一定程度上增加模型的复杂性,且该方法思路决定了其在一定程度上依赖于QP建模时的拟合效果,这使得本方法对于长期的钟差预报仍然逊于常用的长期预报模型,因此该模型仍有待进一步研究。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
网络安全与数据管理(2022年3期)2022-05-23
海外星云(2021年9期)2021-10-14
北京航空航天大学学报(2020年10期)2020-11-14
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
自动化学报(2019年6期)2019-07-23
导航定位学报(2018年3期)2018-09-03
中国军转民(2018年3期)2018-06-08
载人航天(2016年4期)2016-12-01
中国惯性技术学报(2015年1期)2015-12-19
